卫星导航系统接收机原理与设计
——之四
2015-10-27刘天雄
+ 刘天雄
卫星导航系统接收机原理与设计
——之四
+ 刘天雄
4.2导航信号生成
下面以GPS全球卫星导航系统为例简要说明导航信号生成过程,在载波、测距码及导航数据三种信号分量中,首先将导航电文调制到测距码信号中,通过“模2相加”技术合成导航电文和测距码信号,生成直接序列扩频导航信号,然后再把扩频处理后的导航信号利用双向相移键控(BPSK)技术调制到载波信号上,最后由卫星的行波管放大器放大后向地面广播,信号调制过程如图24所示,其中载波信号L1的频率为1575.42MHz,调制一般精度C/A(Course acquisition)测距码信号,便于接收机能够快速捕获导航信号,全世界用可以户免费使用,提供标准定位服务(SPS);载波信号L2的频率为1227.6MHz,调制精密P(Precision Code)测距码信号,仅供美国军方及其战略盟友等授权用户使用,提供标精密定位服务(PPS)。

图24 GPS卫星信号的调制过程
4.2.1扩频操作(Spreading operation)
测扩频通信的理论是香农的信息论,香农给出了信号带宽与信噪比的关系式为,

式中C为信道容量,单位是bit/s,W为信号频率带宽,单位是Hz,S为信号平均功率,单位是W,N为信号噪声平均功率,单位是W。
由香农公式可知,要增加系统的信息传输速率,则要求增加信道容量,增加信道容量的方法可以通过增加传输信号带宽,或者增加信噪比来实现;信道容量为常数时,带宽和信噪比可以互换,可以通过增加带宽来降低系统对信噪比的要求,也可以通过增加信号功率,降低信号的带宽来实现;卫星导航系统采用直接序列系统进行扩频,用伪随机测距码信号调制导航电文数据码,通过扩展信号频谱来增强信号的抗干扰心能。
以GPS系统为例简要说明扩频操作过程,导航电文是由幅值为±1的矩形脉冲序列组成的二进制方波信号,伪随机测距码(C/A code)也是由幅值为±1的矩形脉冲序列组成的方波信号,二进制导航电文信号对二进制测距码信号进行扩频调制,或者说对两个二进制码信号“异或处理(XOR operation)”,也称为“模2相加(Modulo 2 adder)”,生成直接序列扩频频谱DSSS(Direct Sequence Spread Spectrum)信号,然后采用二进制相移键控(BPSK)技术,将直接序列扩频频谱信号调制到载波信号上,如图25所示。
测距码信号对导航电文信号扩频调制的结果是形成一个组合码,致使导航电文信号的频带带宽从50Hz扩展到了1.023MHz,也就是说,GPS卫星原拟发送50 bit/s的导航电文数据D码,转变成为发送1.023 M bit/s的组合码,信号扩频调制技术相当于把窄带信号扩展到一个很宽的频带上,如图26所示。
直接序列扩频频谱DSSS(Direct Sequence SpreadSpectrum)具有如下特征:
·直接序列扩频频谱用于信号体制采用码分多址CDMA(Code Division Multiple Access)的系统
·在同一个载波频率上播发所有用户的信号;All users transmit on the same frequency
·信号的频谱被扩展成类似噪声码信号的频谱;he frequency spectrum of the signal is spread with a noise like code
·扩频码对每一个用户是唯一的,具有较低的互相关性;Spreading codes have very low cross-correlation and are unique for every user
·信号带宽远高于信息带宽,不同用户可以分享同一带宽;Transmission bandwidth is much higher than information bandwidth (but several users can share the same band)
·信号具有一定抗干扰能力;Resists jamming
·由于信号具有带宽大、功率低的特点,由此信号间干扰比较低;Very low interference with other signals because of large bandwidth and low power
图25 导航电文与测距码“异或处理”生成扩频信号
4.2.2导航信号生成流程(Block diagram of signal s ennerator)
下面以GPS系统为例,简要说明如何生成导航信号,GPS卫星广播的导航信号如下式(16)所示:


图26 导航信号扩频处理
GPS系统Ll和L2载波信号就是咱们常见的正弦波信号,导航卫星有效载荷的时间及频率生成子系统生成10.23MHz的基准频率正弦波信号,10.23MHz的成为导航卫星的基本频率,星载原子钟是产生10.23MHz基本频率信号的基础。其中载波信号L1的频率是1575.42MHz(10.23MHz的154倍),波长19.03cm;载波信号L2的频率是1227.60MHz(10.23MHz的120倍),波长24.42cm。GPS系统导航C/A码信号的码速率为1.023 MHz bit/s,P码的码速率为10.23 MHz bit/s,所有的扩频码在每周六过渡到周日的子夜零时进行初始化处理。采用二进制相移键控(BPSK)信号调制技术改变波形的极性,也就是说,脉冲可将载波的相位改变180°,GPS卫星信号产生过程如图27所示,

图27 GPS系统Ll频点导航电文与民用C/A码信号扩频以及扩频码信号对载波信号的BPSK调制
GPS卫星信号的产生流程如图28所示,测距码信号与导航电文信号“异或处理”生成直接序列扩频频信号,“异或处理”用符号(+)表示;限幅器(limiter)用于稳定送到P(Y)和C/A码发生器的时钟信号;数据产生器(data generator)用来根据导航信息(data information)产生导航数据;军用P(Y)码发生器生成的X1信号使民用C/A码码发生器和导航数据发生器三者保持同步;C/A码(+)数据和P(Y)码(+)数据信号提供给L1频率的两个调制器,此处采用二进制相移键控(BPSK)将信号调制到载波上。C/ A码和P(Y)码调制到L1频率上时,其相位是彼此正交的,两个码之间有90o的相位差。P(Y)码调制后的信号衰减3dB后与C/A码调制后的信号相加形成L1信号。
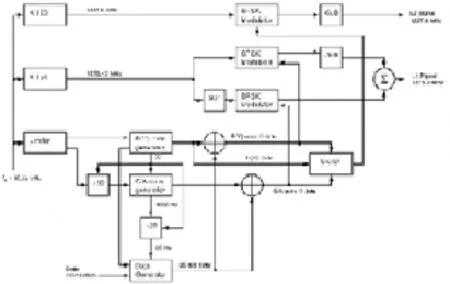
图28 GPS卫星信号的产生框图
4.3导航信号接收处理基本原则Principle
数字信号处理过程从接收来自接收机射频前端(RF section)输出的下变频(down-conversion)数字化(digitalization)导航信号开始,到用户接收机解算出用户位置坐标(navigation solution)为止,中间过程包括捕获(acquisition)、跟踪(tracking)、解调(demodulation)、定位解算(position-solution)等一系列数字信号处理过程。
GNSS接收机基带数字信号处理的基本要素是信号相关处理(correlation process),基本思想在于GNSS的信号以下列方法构造测距码:
·当接收到的导航信号的测距码与接收机本地生成的复制测距码做相关处理时,如果两个测距码相位“对齐”时,那么相关结果是最大的,即测距码具有高度自相关(auto-correlation)特性;
·当接收到的导航信号的测距码与接收机本地复制的测距码做相关处理时,如果两个测距码相位“没有对齐”时,那么相关结果相对比较小;
·测距码与同一码族的其他测距码做相关处理时,相关结果相对比较小,即测距码具有较低的互相关(crosscorrelation)特性;
接收机首先给每个基带数字信号处理通道分配伪随机测距码(PRN),对于码分多址CDMA导航信号体制,每颗卫星播发唯一的伪随机测距码信号,对于频分多址FDMA导航信号,所有卫星播发同样的伪随机测距码。
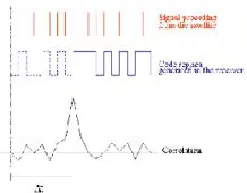
图29 信号相关过程(GNSS接收机移动本地复制测距码,直到相关处理出现峰值)
数字信号处理通道完成导航信号与本地复制伪码信号的相关处理,用户接收机以改变伪码延迟和相位特性来生成本地复制的伪码信号,因此接收机从伪码延迟和多普勒频移两个维度来搜索导航信号,当本地复制的伪码信号与接收到的导航信号的伪码和频率匹配时,相关处理出现峰值,接收机算法判定两个信号的相关处理过程结束,GNSS信号相关处理的基本过程如图29所示,并将相关处理得到的“伪码和频率”作为当前的参数估计值。
由于实际系统存在大量噪声且有可能在动态环境下解算位置,导航信号与本地复制伪码信号的自相关峰值也是波动的,因此,需要使用相位锁相环PLL和延迟锁定环DLL持续跟踪接收到的GNSS信号的相位和伪码延迟。
4.4数字信号处理数学模型Mathematical Model
以GPS卫星广播的L1频点信号为例,如§4.2.2节式(16)所示,即有:

为便于推导导航信号数字信号处理数学模型,忽略噪声,接收机基带数字信号处理通道接收到的数字信号可以写为,

式(17)中:
式(17)可简记为,

式(18)中,

利用当前的载波相位估计值,基带数字信号处理通道中的多普勒频移去除模块(Doppler Removal) 对载波相位进行估计,并根据当前的估计值对复数基带信号进行相位旋转处理,得到如下信号,

式(19)中∶
是相位误差;
是接收机相位估计值;
是接收到的导航信号相位;
接收到的导航信号与接收机本地生成的复制伪码信号进行相关处理,相关处理结果为,

式(20)中∶
是积分时间,即时间间隔的累加;
是接收机伪码延迟估计值;
例如,当接收机跟踪GPS系统L1频点C/A码信号时,相关处结果为,

因式(21)中∶
考虑上文所述测距码与同一码族的其他测距码做相关处理时,测距码具有较低的互相关特性,则相关结果相对比较小,即民用C/A码信号和军用P码信号互相关结果可以忽略,这样GPS系统L1频点C/A码信号相关处结果可以简化为,

因此,导航信号的同相(in-phase)和正交(quadrature)分量的相关公式可分别写为,

式(23)和(24)中∶
