用于空间站组建的翻转式转位方案设计
2015-10-24沈晓鹏胡雪平耿海峰
刘 艳,沈晓鹏,胡雪平,耿海峰,魏 智
(上海宇航系统工程研究所,上海 201109)
用于空间站组建的翻转式转位方案设计
刘 艳,沈晓鹏,胡雪平,耿海峰,魏 智
(上海宇航系统工程研究所,上海 201109)
针对我国空间站工程规划,借鉴和平号空间站的组建经验,提出了一种适用于我国空间站建造的翻转式转位技术方案,即先通过对接机构实现实验舱与核心舱的轴向对接,然后利用翻转式转位机构将实验舱转位至侧向对接口并支持对接机构完成侧向对接。通过任务及功能分析、机构构型分析、机构自由度分析,确定了翻转式转位机构工作原理、具体组成及布局、系统工作过程以及工作时序,同时对其优点及局限性进行了分析,可为空间站工程提供参考。
空间站;翻转式转位机构;方案设计
1 引言
空间站技术代表着航天技术的综合水平,建造大型空间站也是我国载人航天工程的目标之一。由于受到运载工具运载能力的限制,大型空间站要在太空对接组装[1-2]。依据和平号空间站和我国空间站构型,大型空间站组装方案为:在首先发射的核心舱的节点舱前端集中配置若干对接口,包括一个轴向对接口和若干个侧向对接口。其中轴向对接口轴线通过核心舱质心,侧向对接口轴线则不通过核心舱质心。依次发射的其他舱体与节点舱对接口一一对应对接组装。轴向对接口的对接称为轴向对接,可通过直接轴向对接完成组装。侧向对接口的对接称为侧向对接,但由于在轨道控制、姿态控制等方面都存在困难,因此直接侧向对接目前还未能在空间实现[3]。
为了实现侧向对接,一种解决方法是先将航天器对接到轴向,然后利用翻转式转位机构将航天器转移到侧向对接口,实现侧向对接。和平号空间站即采用此种方案。和平号空间站核心舱1986年2月发射升空,直到1996年4月核心舱与最后一个自然号实验舱对接转位组装成功。在整个构建过程中,翻转式转位机构成功实现了各个舱体从轴向到侧向的转位[4]。
另一种侧向对接口对接技术是利用机械臂直接捕获、抓取航天器到侧向对接口,然后进行对接。进行对接的航天器需要在空间站附近预定地点停泊,而且停泊时需要高精度保持相对位置和姿态稳定,这是一个困难的控制问题。现国际空间站采用了这一对接方式[5]。
在翻转式转位机构捕获过程中,由轴向对接机构的对接建立捕获初始条件,而在机械臂的捕获过程中,由两航天器之间的悬停飞行建立捕获初始条件,两者相比,前者技术难度小,可靠性高。我国未来的大型空间站方案与和平号空间站和国际空间站类似,是由多个舱段和模块组合而成的轨道复合体。在我国空间站项目建设计划初期建造轨道复合体处于探索阶段,应用翻转式转位机构实现侧向对接比较经济、稳妥、可靠。本文基于我国空间站系统规划,借鉴和平号空间站的组建经验,进行空间站翻转式转位方案设计。
2 实验舱翻转式转位方案论证
2.1 任务分析
在空间实验室任务成功的基础上,我国将研制并发射空间站。空间站由核心舱、实验舱Ⅰ和实验舱Ⅱ三个模块组成,同时配套载人飞船和货运飞船作为乘员和物品运输的支持系统[6-7],图1是空间站构型示意图。

图1 我国空间站构型示意图Fig.1 Configuration diagram of China's space station
根据以上系统规划,空间站核心舱的节点舱基体为一球形,如图2,在球形基体上几何对称布置6个扩展口,其中一个扩展口延伸连接核心舱主舱体,四个侧向对接口和前端轴向对接口装有被动对接机构。来访航天器轴端安装有主动对接机构,用以实现和空间站节点舱的轴向对接。空间站翻转式转位机构能够用于将上述实验舱Ⅰ和实验舱Ⅱ从轴向对接口转位至相应的侧向对接口。

图2 核心舱的节点舱球形基体构型Fig.2 Spherical basic configuration of the core module's transfer adapter
2.2 实验舱转位组装过程分析
根据文献[3],和平号空间站上配置有转位机构。翻转式转位机构由主动端转臂和被动端基座组成,其中主动端转臂安装在待转舱上,被动端基座安装在节点舱上。节点舱同样为球形基体结构,四个侧向对接口和前端轴向对接口装有被动对接机构。来访航天器轴端安装有主动对接机构,用以实现和空间站节点舱的轴向对接。整个转位过程由转位机构与对接机构共同作用完成,转位机构和对接机构在舱体上的布局如图3[3]。

图3 待转舱上的转臂和节点舱上的基座Fig.3 The manipulator arm on the lab and the mating sockets on the core module
和平号空间站上的翻转式转位机构主动端转臂具有2个旋转关节和一个捕获连接机构;转位机构被动端基座与转臂配合完成相应动作。如图4所示[3]。转臂与基座的捕获连接和解锁功能由主动端转臂驱动实施。转位机构的工作过程类似于登山运动,首先对接机构保持连接情况下实现转位机构主被动端转臂和基座的捕获连接,然后在转位机构连接的情况下,对接机构解除连接,由转位机构将舱体转移到侧向,再由对接机构实现捕获连接[3]。

图4 转臂和基座Fig.4 The manipulator arm and the mating socket
参考和平号空间站的组建过程,采用类似和平号转位方案,利用翻转式转位机构进行空间站实验舱Ⅰ和实验舱Ⅱ的组建过程如下:1)实验舱Ⅰ与核心舱的节点舱建立轴向对接;2)转位机构在实验舱Ⅰ与节点舱之间建立刚性连接;3)实验舱Ⅰ与节点舱解除轴向对接;4)转位机构将实验舱Ⅰ转位至节点舱侧向对接口;5)转位机构状态保持,实验舱Ⅰ与节点舱建立侧向对接;6)转位机构解除实验舱Ⅰ与节点舱之间的刚性连接。
实验舱Ⅱ的组装过程与实验舱Ⅰ相同,转位至另一侧向对接口。具体过程如图5所示。

图5 利用翻转式转位机构进行空间站实验舱Ⅰ和实验舱Ⅱ组建过程示意图Fig.5 Process diagram of labⅠand labⅡassembling by tilting transfer mechanism
2.3 功能分析
在将实验舱从轴向转位到侧向的动作之前,转位机构主被动端之间需要进行捕获和连接;在建立了可靠的刚性连接之后,将实验舱从轴向对接口转位到侧向对接口;在侧向对接口,为了克服对接机构侧向捕获过程中的作用力,转位机构需要具有位置保持功能,以支持对接机构实现侧向捕获;在对接机构侧向对接捕获完成后,转位机构主被动端之间进行解锁、分离,解除实验舱与节点舱之间的约束后对接机构实现侧向刚性连接。功能可以归纳如下:
1)捕获:在规定的初始条件下,实现转臂与基座的捕获;
2)连接:在实验舱和节点舱之间提供所需连接力并达到一定连接刚度,连接过程中能够校正转臂与基座的位姿误差,转位过程中能够保持连接状态;
3)转位:能够将实验舱I和实验舱II从节点舱轴向转至侧向预定停泊口,完成启动、转动、缓冲、制动过程;
4)位置保持功能:肩关节和腕关节能够实现相对位置的保持并在一定负载下不产生角位移;
5)解锁:解除转臂和基座之间刚性的连接,转臂故障模式下,基座具备备份解锁功能;
6)分离:解除转臂与基座的接触,克服分离过程中的负载,为侧向对接提供空间。
3 实验舱翻转式转位路径设计
翻转式转位机构在实验舱Ⅰ与节点舱之间建立刚性连接后将实验舱从轴向到侧向的转位功能时,根据转位机构运动自由度的不同,会有多种转位路径。在确定翻转式转位机构系统方案时,以简单可靠机构自由度最少为原则进行转位功能实现过程的路径设计。下面对实验舱从轴向转位到侧向所需的最少运动自由度进行分析。
3.1 摆动旋转运动自由度
在空间站舱段组装时,每个实验舱需要配置一套转位机构。如果在节点舱上相应地只配置一套转位机构,又要求能转位到四个侧向对接口中的任意一个侧向对接口,则翻转式转位机构需要设计为多自由度机械臂系统。相反地,如果在节点舱上相应地分别配置四套转位机构,分别将实验舱转位到四个侧向对接口,实现功能的同时也增加了转位机构的重量。因此从自由度最少和系统质量最轻的角度出发,节点舱上转位机构的配置方案如下:
在节点舱上布置两套转位机构,分别在节点舱轴向对接口和相邻两侧向对接口中心与节点舱球形基体的球心所组成的正立方体的对角线处,即图6所示球心与o点所连直线,并将此直线作为舱体从轴向对接口摆动到侧向对接口的摆动旋转轴线,从而使得轴向、相邻的侧向共3个对接口相对该对角线的空间转角均相同,即120°,实验舱从轴向对接口到达相邻的两个侧向对接口为对称动作。
空间站组建过程中,应预先设定实验舱上转位机构与节点舱上转位机构的对应位置,从而确定由轴向对接口向预定的侧向对接口转位。
基于节点舱上转位机构最优的配置方案,即节点舱上两两相邻侧向对接口间布置一套转位机构,节点舱上共配置两套转位机构的布局方案,转位机构需要设计一个绕正立方体对角线(如图6所示)旋转的摆动旋转自由度以驱动实验舱从轴向对接口摆动到预定的侧向对接口。

图6 舱体摆动旋转轴线Fig.6 The axis of lab swing rotation
3.2 轴向运动自由度
我国空间站规划使用周边式对接机构,根据文献[8],我国应用于神舟飞船和天宫目标飞行器实现交会对接的周边式对接机构采用导向瓣内翻的异体同构周边式构型。对接过程主要包括对接环推出准备、接触与缓冲、捕获、缓冲与校正、拉近、刚性连接等步骤,其过程如图7所示。

图7 对接机构工作过程Fig.7 Docking process
对接机构对接框上装有导向板、导向销、导向套、分离推杆和锁系,导向板为空间交错分布,导向销与分离推杆在圆周上非均匀分布,如图8所示[9]。转位机构如果在主被动对接机构拉紧时实现捕获连接,并在此状态下将舱体直接摆动到侧向将必然会出现结构的干涉,需要使实验舱与节点舱两对接机构端面分开一定的距离。该推出运动自由度可由主动对接机构将对接环推出实现,因此不需要转位机构设计相应的运动自由度。
3.3 上下翻转旋转运动自由度
根据周边式对接机构推出能力,在对接机构达到其最大推出距离时进行绕前述摆动旋转轴的旋转运动并考察干涉情况,分析知主动对接框I、IV象限导向套与被动框I、II象限导向套会接触干涉,因此转位摆动旋转运动前需要增加一个舱体上翻旋转动作,对应的转位摆动旋转运动后有一个舱体下翻旋转动作,上翻旋转运动如图9所示。同时,上翻旋转后实验舱质心距离摆动旋转轴距离减小,降低了摆动旋转运动的转动惯量。

图8 导向板及销(套)干涉检查Fig.8 Guide pin and sleeve interference checking

图9 舱体上下翻转旋转运动轴线Fig.9 The axis of lab up and down tilting rotation
4 翻转式转位机构配置设计
转位机构系统需要由主动端和被动端配合实现转位功能,主动端是指主动驱动实施转位机构间捕获、连接和解锁功能的部分,称为转臂;被动端是指配合主动端完成转位机构间捕获、连接和解锁功能的部分,称为基座。由于主动端与被动端分别配置于节点舱和实验舱上,将导致不同的转位机构系统设计方案。因此论述如下:
主动端转臂和被动端基座在节点舱和实验舱上的安装方式分为两种:一是转臂装在实验舱上,基座装在节点舱上;二是基座装在实验舱上,转臂装在节点舱上。主被动端这两种不同的构型方式导致机构功能实现方案以及可靠性水平高低的不同。下面分三种不同方案进行分析比较(由于连接、解锁、位置保持功能的实现不受机构构型的影响,因此不针对此三项功能进行对比分析)。
1)如图10(a)所示,主动端转臂安装在实验舱上,被动端基座安装在节点舱上。捕获、分离的旋转运动和实验舱翻转运动由主动端转臂实现。实验舱摆动旋转运动由主动端转臂实现,旋转轴为基座的旋转中心。转位机构为2自由度机构。
2)如图10(b)所示,主动端转臂安装在节点舱上,被动端基座安装在实验舱上。捕获、分离的旋转运动和实验舱翻转运动由主动端转臂实现。实验舱摆动旋转运动由主动端转臂实现。转位机构为2自由度机构。
3)如图10(c)所示,主动端转臂安装在节点舱上,被动端基座安装在实验舱上。捕获、分离的旋转运动由主动端转臂实现。实验舱翻转运动由被动端基座实现,实验舱摆动旋转运动由主动端转臂实现。转位机构为3自由度机构。
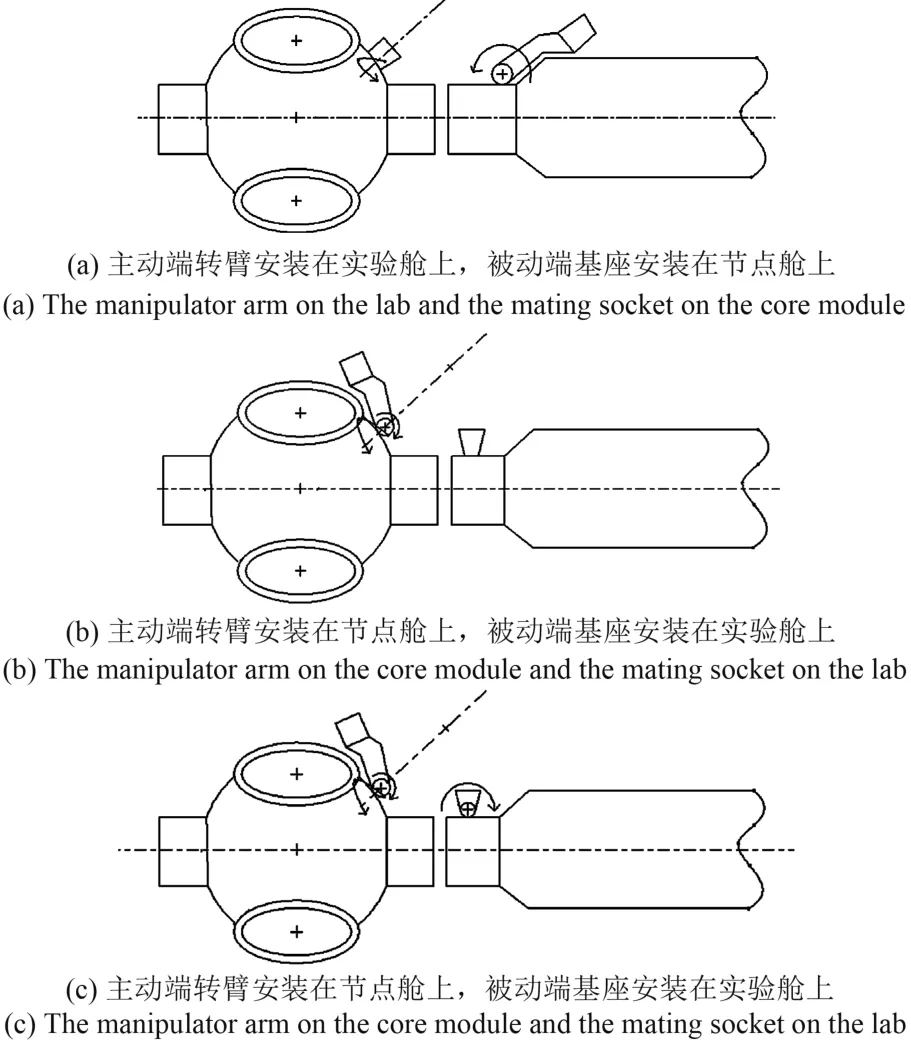
图10 机构构型分析Fig.10 Analysis of the mechanism configuration
不同构型对比分析见表1,主要从三方面进行对比分析:一是转臂和基座结构复杂程度;二是机构在轨运动时间及可靠性要求;三是完成空间站系统组建各个舱体上所需的转位机构配套。
综合分析,在系统配套质量可以接受的情况下,方案A为最优的构型方案,转臂安装在实验舱上,基座安装在节点舱上。
5 翻转式转位机构布局及原理设计
转位机构具体组成及机械原理图如图11。其机械系统由转臂、固定座和基座三个部分组成。基于上述分析确定转臂和固定座安装在实验舱上,基座安装在节点舱上。转臂由两个旋转副和一个移动副组成,分别是肩关节驱动机构、腕关节驱动机构和捕获连接机构。其中捕获连接机构的万向摆动组件头部的捕获锥头与基座锁钩配合实现捕获连接功能。肩关节和腕关节驱动机构用于驱动实验舱两自由度旋转,固定座用于发射时将转臂固定于舱体上。基座与转臂配合完成动作。

表1 构型分析表Table 1 Analysis of the mechanism configuration
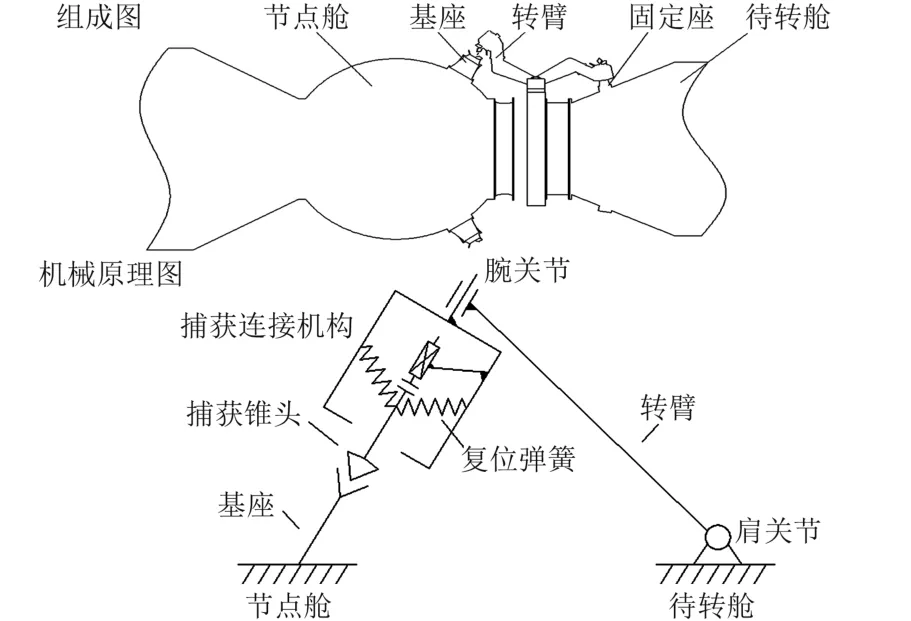
图11 转位机构布局及原理图Fig.11 Layout and principle of the tilting transfer mechanism
6 实验舱翻转式转位工作过程设计
实验舱转位组装过程需要转位机构与对接机构交互工作配合实现。实验舱与节点舱轴向对接口通过周边式对接机构实现锁紧、密封并完成货物转运后,实验舱准备进行转位任务。
在转臂与基座捕获前,使对接机构捕获锁锁紧、对接锁解锁。对接环推出至准备转位位置(即推出至避免干涉的位置),进行转臂和基座的捕获。此时节点舱与实验舱之间通过对接机构捕获锁锁紧来保持连接状态,转臂与基座的捕获初始条件主要由对接机构对接环推出偏差决定,而不依赖于两航天器之间的位置姿态控制精度,因此在转臂与基座的捕获能力覆盖捕获偏差范围的条件下能够保证转臂和基座的可靠捕获。

图12 实验舱翻转式转位工作过程Fig.12 Process of lab tilting transferring
转位机构转臂旋转捕获基座并刚性连接后,对接机构捕获锁解锁,对接环拉回,以解除实验舱与节点舱之间对接机构的约束。
转位机构驱动实验舱完成规划的上翻、摆动和下翻的转位路径后,实验舱到达侧向对接口。
在侧向对接口,通过转位机构转臂与基座之间的刚性连接来保证节点舱与实验舱之间的相对位置,使对接机构可靠捕获。在此过程中转位机构需提供对接机构对接环推出捕获锁捕获过程的支反力,对接机构侧向捕获完成后,转位机构转臂与基座间解锁复位,对接机构对接环拉回,对接锁锁紧完成刚性连接密封。
上述转位过程如图12所示,转位过程对接机构与转位机构的协同交互配合关系如图13所示[9]。

图13 对接与转位机构协同配合关系Fig.13 Docking and transferring's cooperate relationship
7 结论
与机械臂相比,转位机构臂体长度小,自由度少,结构简单,能够安全可靠地完成舱体从轴向到侧向对接口的转位任务。但是转位机构在完成转位任务的同时,也具有一定的局限性,主要体现在以下三个方面:
1)功能单一,转位机构仅用于舱体从轴向到侧向的转位,而不具有操作各种试验载荷的功能;
2)舱体象限的90°翻转,如前所述,转位机构基座为轴向对接口和相邻两侧向对接口间的对称放置,摆动旋转角度为120°,摆动旋转运动后,舱体象限会发生90°翻转,在实验舱内设备不允许进行翻转的情况下将无法使用此转位方案;
3)转位方案基于对接机构具有主动推出能力的情况下进行机构自由度设计,因此如果与之匹配的对接机构不具有轴向推出运动的自由度,则转位方案将需要增加这一直线运动自由度。
(
)
[1] 袁建平,罗建军.空间站的发展及我国发展空间站的意义[J].世界科技研究与发展,1998,20(6):99-101.
Yuan Jianping,LuoJianjun.The Development of Space Station &the Significance of Developing Space Station In China[J]. The Scientific Research and Development,1998,20(6):99-101.(in Chinese)
[2] 周以蕴.前苏联/俄罗斯载人空间站的发展[J].国际太空,1996(2):20-25.
Zhou Yiyun.The Former Soviet Union/Russia's Development of Manned Space Station[J].The International Space,1996 (2):20-25.(in Chinese)
[3] Syromiatnikov V S.Manipulator system for module redocking on the Mir Orbital Complex[C]//Robotics and Automation,1992.Proceedings.,1992 IEEE International Conference on. IEEE,1992:913-918.
[4] 刘艳.舱体转位机构方案研究[D].上海:上海宇航系统工程研究所,2007.
Liu Yan.The Study of Module Transfer Mechanism System Scheme[D].Shanghai:Aerospace System Engineering Shanghai,2007.(in Chinese)
[5] 邓伟.伸向太空的巨臂[J].太空探索,2005(9):20-23.
Deng Wei.Huge Mechanical Arm Extended to the Space[J]. SPACE EXPLORATION,2005(9):20-23.(in Chinese)
[6] 陈善广,陈金盾,姜国华,等.我国载人航天成就与空间站建设[J].航天医学与医学工程,2012,25(6):391-396.
Chen Shanguang,Chen Jindun,Jiang Guohua,etc.Achievements of Manned Space Program and Construction of Space Station in China[J].Space Medicine&Medical Engineering,2012,25(6):391-396.(in Chinese)
[7] 王永志.实施我国载人空间站工程推动载人航天事业科学发展[J].载人航天,2011,17(1):1-4.
Wang Yongzhi.Launching Manned Space Station and Promoting the Development of China's manned space Engineering [J].Manned spaceflight,2011,17(1):1-4.(in Chinese)
[8] 陈宝东,唐平.空间对接机构技术及其研制[J].上海航天,2006,22(5):6-8.
Chen Baodong,TangPing.The Technology Development of Docking Mechanism System[J].AEROSPACE SHANGHAI,2006,22(5):6-8.(in Chinese)
[9] 沈晓鹏.空间站舱体转位机械臂研究[D].上海:上海宇航系统工程研究所,2009.
Shen Xiaopeng.The Study of Space Station Module Transfer Mechanism System Scheme[D].Shanghai:Aerospace System Engineering Shanghai,2009.(in Chinese)
Scheme Design of Tilting Transfer Mechanism for Space Station Assembling
LIU Yan,SHEN Xiaopeng,HU Xueping,GENG Haifeng,WEI Zhi
(Aerospace System Engineering Shanghai,Shanghai 201109,China)
For the space station project of China,referring the experience of the Mir space station construction,this paper proposed a tilting transfer technology solution suitable for China's space station construction.First,the lab and the core module was docked along the axial through the docking mechanism.Then tilting transfer mechanism was used to transport the lab to the lateral interface and support the docking mechanism to complete the transposition of lateral docking assembly.Through the task and function analysis,the mechanism configuration analysis,and the degree of freedom analysis,the principle of tilting transfer mechanism,the specific composition and layout,the working process of the system as well as the working sequence were determined.Its advantages and limitations were analyzed which may provide valuable references for the space station project.
space station;tilting transfer mechanism;scheme design
V423.7
A
1674-5825(2015)06-0575-07
2015-03-23;
2015-08-14
上海市科学技术委员会资助项目(15XD1524000)
刘 艳(1981-),女,硕士,高级工程师,研究方向为空间机构系统设计及可靠性设计。E-mail:87144831@qq.com
