EMD故障诊断与激光测振技术的研究与应用*
2015-10-22张深逢程晓萍陈士钊叶岗宋云峰
张深逢 程晓萍 陈士钊 叶岗 宋云峰
(1.宁波舜宇智能科技有限公司 2.华北水利水电大学)
EMD故障诊断与激光测振技术的研究与应用*
张深逢1程晓萍2陈士钊1叶岗1宋云峰1
(1.宁波舜宇智能科技有限公司2.华北水利水电大学)
介绍了经验模态分解故障诊断方法,该方法统一了瞬时频率的概念,产生时频域分析方法—本征模态函数,可以突出局部数据特征,提取更准确、更有效的原始信号特征信息,并经过分解,提炼出有效时域信号,对其进行Hilbert-Huang变换,实现信号在频域中的再分析;提出的激光多普勒测振技术,具有抗干扰、高分辨率、高精度、非接触式的振动优点。通过激光测振仪采集数控机床齿轮振动信号,并借助经验模态分解方法,诊断出轴承与轴瓦之间存在着频率为33.3 Hz的周期性摩擦现象,从而证明了EMD能从大量的非线性、非平稳信号中提取振动特征信息和相关的模态参数,是一种非线性、非平稳等时变信号处理方法。
经验模态分解;时频域联合分析;故障诊断;激光多普勒
0 引言
在机械运行状态监测、振动分析和故障诊断过程中,存在大量的非线性、非平稳信号。傅里叶变换(fast fourier transform,FFT)、时频域分析(wigner-ville distrbution,WVD)和小波分析等信号分析方法,虽然给出时变性的描述,但对于出现瞬时频率的局域性信号,则无法满足功能需求。
美国宇航局Norden E. Huang于1998年提出经验模态分解(empirical mode decomposition,EMD)方法,它是一种时频域分析方法,是指将一个复杂时间序列信号分解为有限个不同时间尺度的本征模态函数(intrinsic mode function,IMF)之和,每个本征模态函数所包含的频率成分都与信号的分析频率有关,而且随着复杂时间序列信号的变化而变化。经验模态分解方法的提出,统一了瞬时频率概念,并且产生以时域基本信号为基础的新时频域分析方法—基本模式分量的概念,突出了数据局部特征,可以提取更准确、更有效的原信号的特征信息。
目前,经验模态分解应用广泛,如Huang N E 等人将EMD应用于水波研究[1]、合成孔径雷达图像滤波,检测冲击波瞬时频率的量值;Yue Huanyin等人将EMD应用于地理学,设计了逐次逼近型模数转换器的滤波器,提高了滤波效果[2];Yu dejie等人将EMD运用于滚子轴承的故障诊断中,检测滚子轴承受力不均导致轴承和轴瓦周期性摩擦的冲击故障[3-4];Liu B等人将EMD应用于齿轮箱的故障诊断中,检测出齿轮啮合出现周期性噪声的原因是其中一个齿轮出现轻微裂纹[5]。
本文通过激光测振仪采集数控机床齿轮振动信号,借助经验模态分解方法,诊断出轴承与轴瓦之间存在着频率为33.3 Hz的周期性摩擦现象,验证了EMD分解法在诊断摩擦故障方面的优越性。
1 经验模态分析理论
1.1Hilbert-Huang变换分析
经验模态分解可以获取原始信号的本征模态函数IMF,这些IMF是一系列相互关联的时域信号,要从中获取频域中的信息,需要对本征模态进行数据处理,Hilbert变换是一种最常用的方法。
Hilbert变换是信号分析中的重要工具,对任意给定信号x( t),其Hilbert变换y( t)定义为

其中,t是时间,τ是延迟时间。
由式(1)可知,Hilbert-Huang变换是x( t)与1 πt的卷积,对应频域输出如图1所示。

图1 Hilbert传递函数特性图
由于任何信号都可以看作是正弦信号的叠加,因此,对于任意给定信号x( t)可表示为

其中,a( t)是信号x( t)的调制信号;fs为载波高频频率;φ(t)为相位函数。
根据Hilbert-Huang变换原理,以x( t)为实部,以x( t)的Hilbert变换y( t)为虚部,y( t)亦可表达为y( t)=a( t)·sin[2π fst+φ(t)],构造解析函数z( t)为

其中幅值函数

相位函数

a( t)的绝对值|a( t)|成为时间信号x( t)的包络线,用于信号的包络线分析,也称为被测信号的解调分析。这种分析方法成功运用在齿轮、滚动轴承的振动分析中,并且得到了理想的解调分析结果。
对相位函数φ(t)求导,便可得到瞬时频率

或

瞬时频率是Hilbert变换的一个重要概念,瞬时频率概念的提出衍生了本征模态函数。
1.2本征模态函数
经过经验模态分解后的每个IMF分量,也可以构造每个IMF的解析函数,进而研究每个IMF的瞬时频率,其算法

由此,可以分别得出每个IMF的幅值函数和相位函数。
幅值函数

瞬时相位函数

并由此可以求出瞬时频率

或

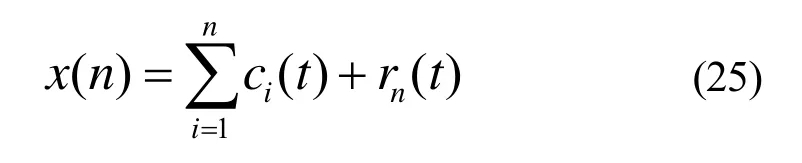
这样任意时间信号x( t)可以表示为多个基本模式分量ci( t)和余项rn( t)之和。

其中rn( t)是Hilbert变换的余项,也叫残差函数,当省略后,式(12)变为

式(13)称为Hilbert幅值谱,另记作

式(14)精确描述了信号幅值在整个频率段上的变化规律,因此,更确切地说是完整信号能量时频域图谱。如果取式(14)中若干个IMF进行局部分析,便可以得到Hilbert的局部图谱。

式(15)精确地描述信号的幅值在所需要的频率段上随频率和时间变化的规律。
由式(14)可以定义边际谱h(ω)

可见,边际谱h(ω)是时频谱H(ω,t)对时间的积分,表达了频率在整个频域段上的能量贡献程度,反映在概率上能量在整个频率段上的积累。Hilbert变换实际是反映了在某个频率上的幅值对整个频率段上的权值贡献,在边际谱上某个频率仅仅代表了该频率振动存在的概率大小,此振动在Hilbert图谱中发生的精确时间可用式(17)表示。

对比式(13)和式(17)可以看出,式(13)中ai( t)、ωi(t)是时间函数的变量,式(17)中ai、ωi是常量。式(17)很好地描述了时间和频率的定量关系,能够实现时变信号的完整分析。
对Hilbert时频谱的平方再对频率积分,可得到瞬时能量密度

由式(18)可以看出,对频率积分后,只有自变量时间t,因此,瞬时能量密度IE( t)是时间t的函数,反映能量随时间t的波动情况。以上基于经验模态分解EMD的信号分析方法统称为Hilbert-Huang变换(Hilbert-Huang Transformation,HHT)。
1.3分解筛选停止准则
Hilbert-Huang变换用可变幅度(权值)和瞬时频率分解信号,避免虚假谐波分量处理非平稳、非线性信号存在的缺陷,一方面实现经验模态分解将任意时间信号分解为本征模态函数加权之和;另一方面也实现用其求解每个本征模态函数的瞬时频率,真正赋予具有局部时间尺度的本征模态函数和瞬时频率实际的物理意义。Huang N E等研究发现,不是每一个时间信号x( t)都具有本征模态函数,只有满足以下2个基本条件,才能分解本征模态函数[6]。
1) 在整个时间段上,时间信号x( t)极值点的数量Ne(含极大值和极小值)与过零点的数量Nz相等或差值为1,即

2) 对于任意给定的时间点ti∈(ta,tb),贯穿局部极大值的上包络线fma(xt)和局部极小值的下包络线fm(int)的均值为零,即

条件1类似于高斯平稳过程的分布,条件2将全局限定变为局部限定,可避免波形不对称导致的瞬时频率波动,其实质是用局部极大值和局部极小值的包络线近似和代替,以使局部均值为零。钟佑明等人在对本征模态函数的数学模型进行详细深入分析之后,论证了Hilbert建立的局部对称性的必要性和用局部极大值极小值的包络线近似和代替的合理性[7]。
然而,实际上很难满足这2个条件,尤其是局部极大值、极小值点的均值为零的条件几乎无法达到。而且,完全按照这2个条件分解本征模态函数需要多次筛选,计算量较大,也导致分解本征模态函数失去了其实际的物理意义,因此,必须确定筛选过程停止准则。
筛选过程的停止准则可用经验法表示,通过限制2个连续准本征模态函数处理结果的标准差Sd的大小来确定,如式(21)所示。

其中,i为第i个本征模态函数;T为信号的时间宽度;hi(k-1)(t)、hik( t )是筛选本征模态函数过程中2个连续的处理结果的时间信号;k为筛选的次数。
标准差Sd的值越小,分解得到的本征模态函数的线性和稳定性越好,能够分解的本征模态函数的数量也越多。经验表明,当Sd在0.2~0.3范围时,不仅能保证得到的本征模态函数的线性性和稳定性,而且能使所得本征模态函数具有实际的物理意义。
2 经验模态分解算法过程
2.1算法分解流程
EMD贯穿了时域频域分析,然而其有较大的局限性,如它要求信号必须满足2个限定条件,才能分解出若干个IMF,但大多数信号并不能满足这2个苛刻的条件。Huang N E等假设:任何信号都由一定内在联系的IMF组成,每个IMF,或非线性,各IMF之间相互关联,形成组合信号。Huang N E等进一步指出[8],可用改进的EMD算法,将所需本IMF先提取出来,再作进一步分析,此过程也称筛选过程,其实质是基于数据的特征时间尺度来获取各IMF。
基于IMF分解的定义,信号分解的最终目的是得到使瞬时频率概念有意义的IMF,按照分解IMF的2个限定条件,其分解原理步骤如下[9]:
1) 把信号x( t)作为待处理信号,找出该信号所有局部极大值点、极小值点;用3次样条曲线连接局部极大、极小值点,得到信号x( t)的上、下2条包络线,则信号x( t)的所有点均位于上、下包络线之间;取上、下2条包络线均值组成的有序序列为m( t),如图2所示。 “。”和“*”标志分别代表信号x( t)的极大、极小值点,上、下2条虚线表示极值点的上、下包络线,点划线表示上、下两条包络线的均值序列m( t)。
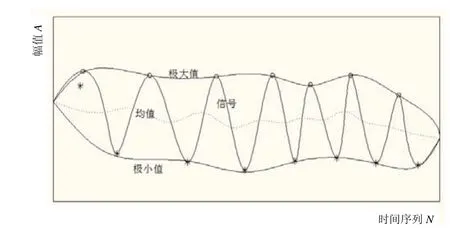
图2 EMD分解原理图
2) 用信号x( t)减去其上、下包络线的均值m( t),可以得到h1( t)

核查h1( t)是否满足IMF的2个限定条件,如不能,则把h1( t)当待处理信号,重复以上操作,直到h1( t)满足IMF的条件要求,此时,记为

3) 提取信号x( t)中的第1个c1( t)后,从信号x( t)中减去c1( t),得到剩余时间r1( t)。

4) 把r1( t)当作新的待处理信号“c1( t)”,重复上述操作,依次可以得到n个IMF,分别记为c2( t),c3( t),···,cn( t ),这个分解过程满足停止准则式(21)时停止,最后得到余项rn( t)。这样,将信号x( t)分解为n个IMF和1个余项的和,即
归纳以上4个步骤,将Hilbert-Huang变换的算法以程序流程图的形式绘出,如图3所示。
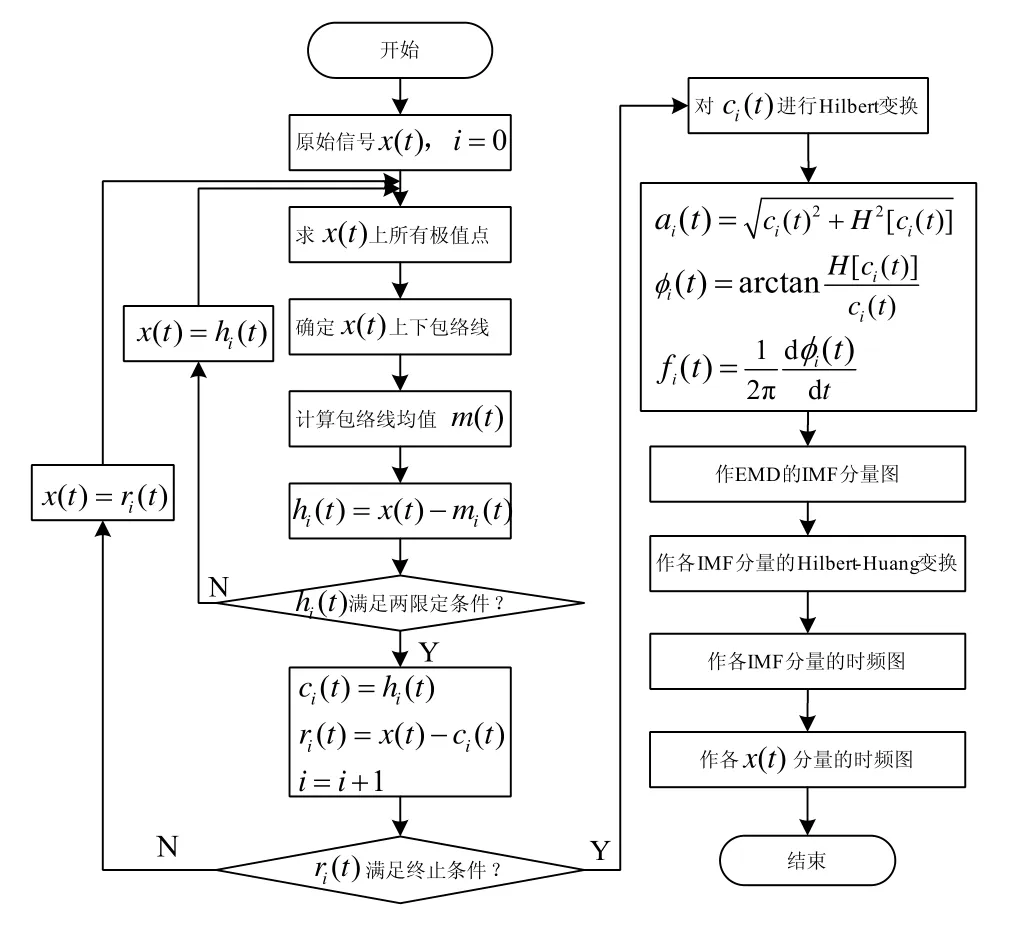
图3 Hilbert-Huang变换算法程序流程图
然而,Hilbert-Huang变换亦有其缺点,基于EMD的Hilbert-Huang变换每次要迭代,信号包络线都要用三次样条插值前后各2个临近点。但是,三次样条插值要求信号临近点是极值,但实际中信号临近点不一定为极值,于是插值求包络线时便把端点当作极值点,从而引起差值失真,导致分解出的各个IMF在两端点附近失去物理意义。当只分解出1个IMF时,这种端点效应影响较小,但当分解出多IMF的复杂信号来说,特别是需要作多次EMD分解,边缘效应会无限放大,严重淹没了信号的特征信息,这种在分解过程中两端点附近出现失真的现象就是“端点效应”[10]。
2.2算法端点效应
端点效应的出现,严重限制了EMD的应用,如对高频信号来说,失真程度不会很严重,分解的IMF误差不太大;但对低频信号来说,三次样条插值将不能决定靠近极值点以外的数据走向,端部的边缘效应会传递到信号的内部,这样分解的IMF被影响的程度和传递到信号内部的长度都受到了极大影响,更难以获得有用的信息,甚至完全失去原始信号的绝大部分信息,或者获得错误很大的分析结果。因此,需要研究有效的端点效应抑制方法[11-12]。
出现端点效应的原因有:数据序列的长度有限;三次样条插值时需要用到前后各2个临近点,而这2个端点不一定是极值点。因此,可以这2个原因为着手点分析研究抑制端点效应的方法[13-15]:延长信号序列的长度或者在数据两端增加极值点;采用其他的样条插值函数;基于Hilbert-Huang变换理论。
通常采用以下几种方法抑制端点效应:
1) 直接对原始数据的端点为极值点进行简单延拓;
2) 采用全局统计平均方法延拓极值;
3) 采用神经网络方法对数据延拓;
4) 采用局部统计平均方法延拓极值;
5) 在端点处数据“平衡位置”附加2条平行线段的方法延拓极值;
6) 采用多项式拟合的方法延拓极值点;
7) 基于AR模式的时间序列线性预测方法;
8) 镜像延拓法延拓极值;
9) 具有更高预测精度的支持向量机(support vector machine,SVM)的双边延拓等。
以上9种抑制端点效应的方法各自有其适用场合,也各有其优势侧重点,现选取几种较常用的方法总结归纳如下:
全局统计平均方法延拓极值是指分析待处理信号的极大值、极小值,定出两端点附加极值点的位置和幅值,构造新区间,并确保极大值、极小值的区间不小于当前待分析信号的长度。全局统计平均方法能在一定程度上抑制端点效应,但是进行全局统计时,如果信号中含有几个幅值较大的极值时,会使两端点附近的分析结果出现误差和畸变,这种情况可采用局部统计方法延拓极值。局部统计方法延拓极值与此类似,不再赘述。全局统计平均方法延拓极值和局部统计方法延拓极值常常结合使用,以各展所长,弥补缺陷。
采用神经网络方法对数据延拓,是基于神经网络对于集合复杂关系的强映射能力,其基本理论基础是假定BP神经网络中隐含层单元可以根据需要自由设定,3层BP网络可以实现任意精度的映射。其抑制端点效应的具体步骤如下:
1) 以端点[x0,xn]为三次样条的插值区间,选定两端点作为起始点,向内m个点为神经网反向和前向外插训练样本;
2) 建立反向和前向外插神经网络,该网络结构为带有反馈的递归网络结构(RBP网络),RBP网络结构如图4所示。
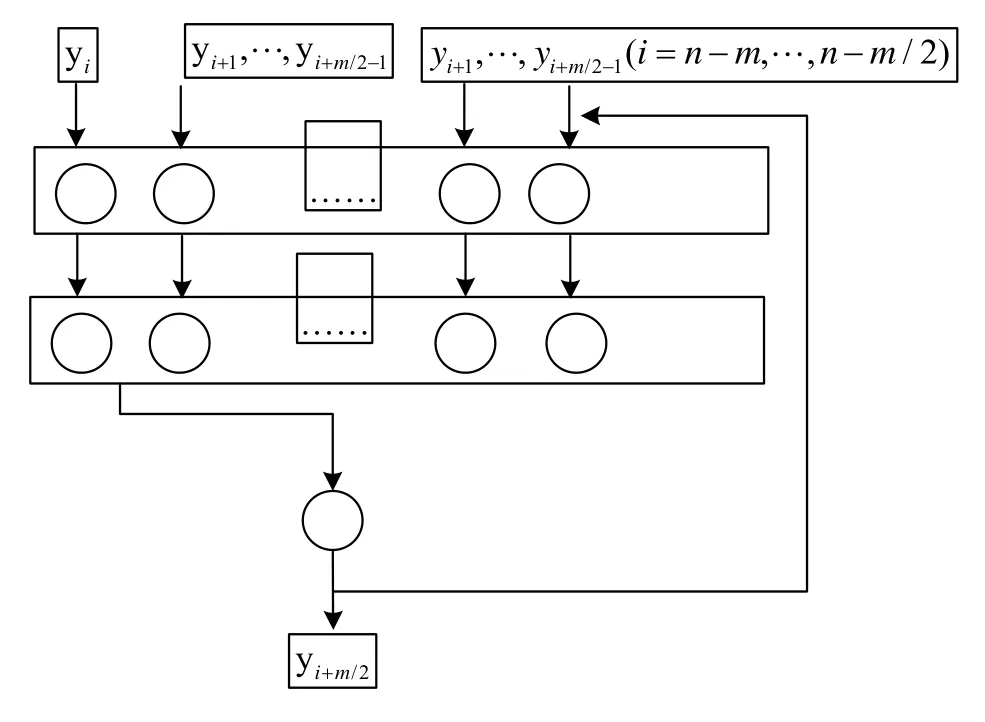
图4 反向和前向外插值递归型RBP网络结构
3) 分别用反向和前向外插神经网络对本RBP网络进行训练,即用训练实现映射训练。同样,其他映射反向训练过程类似前向训练。
用训练过RBP网络结构进行反向和前向外插逐点计算,以前向训练为例,其过程用训练yn+1,然后将yn+1反馈到网络输入端,继续用训练依次类推,预测步数在一定的范围,以保证训练精度[16]。
经过多年的分析研究,国内众多学者分别提出工程上比较实用的自适应时变滤波法ATVFD[17-18]、极值域均值模式分解法EMMD[19]和计算精确度更高的极值域均值模式分解算法IEMMD[20],这3种方法都是局部均值求解的实用化技术。下面阐述局部均值求解速度和精度都比较好的极值域均值模式分解算法IEMMD。
极值域均值模式分解算法IEMMD取消了相邻极值点变化均匀的假设,求出所有局部极值点组成的极值点序列e( ti),其中

其中,ti是第i个时间;ti+1是第i+1个时间。
由于极值点e( ti)中的极大、极小值点呈间隔排列的,则局部极值序列mi( tε1)与信号有唯一的交点,对应时间为tε1;mi+1(tε2)与信号也有唯一交点,对应时间tε2,如图5所示。设mi( tε)在待分析信号x( t)中介于x( tj)和x( tj+1)之间,1≤j≤k-1。

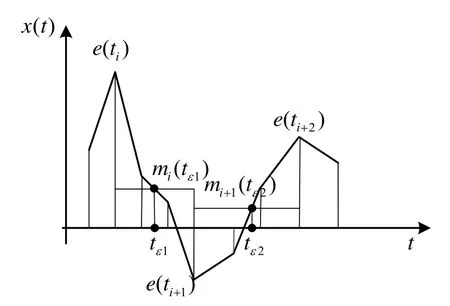
图5 信号、极值点与局部均值的关系图
然后用均值序列mi( tε1)和mi+1(tε2)以数学加权平均,求其在ti+1处的局部均值m( ti+1),即

其中,k( ti)和k( ti+1)是通过梯形相似的几何特性得到的加权系数

IEMMD既使用了信号局部数据,又用到中值定理求解mi( tε)时对应tε,这样得到的局部均值较正确,瞬时频率得到保证,分解出的IMF精度和时频分辨率更高。
EMD分解方法的前提是所采集信号一定要准确反映机械设备运行状态,因此,采集数据的质量也是影响EMD分解方法的重要因素。本文采用激光高速测振的方法采集数据,该方法具有抗干扰、高分辨率、高精度、非接触式的优点。
3 EMD联合激光测振技术的结果与验证
3.1激光测振技术
激光测振技术是一种非接触的测量振动技术,该测振技术具有抗干扰、高分辨率、高精度、非接触的特性。激光多普勒测振仪可以应用在许多接触式测振方式无法测量的任务中,出色的频率和相位响应,可准确地对各种物体的振动、位移、速度及加速度等进行测量。在满足高精度、高速测量需求的同时,还可以弥补接触式测量方法无法测量大幅度振动的缺陷。以激光多普勒测振仪(Laser Doppler Vibrometer,LDV)为例,它主要由1台高精度激光干涉仪和1台信号处理器组成,高精度激光干涉仪内的He-Ne激光器发出的偏振光(频率为f0)由分光镜分成2束:一路作为测量;一路用于参考。测量光通过声光调制器具有一定频移F,再被聚焦到被测物体表面,物体振动引起频移(f=2ν λ)。系统手机反射光并与参考光汇聚在传感器上,2束光在传感器表面形成干涉,干涉信号的频率为F+f,携带了被测物体的振动信息,信号处理器将频移信号转换为速度和位移信号[21]。激光测振系统原理图如图6所示。
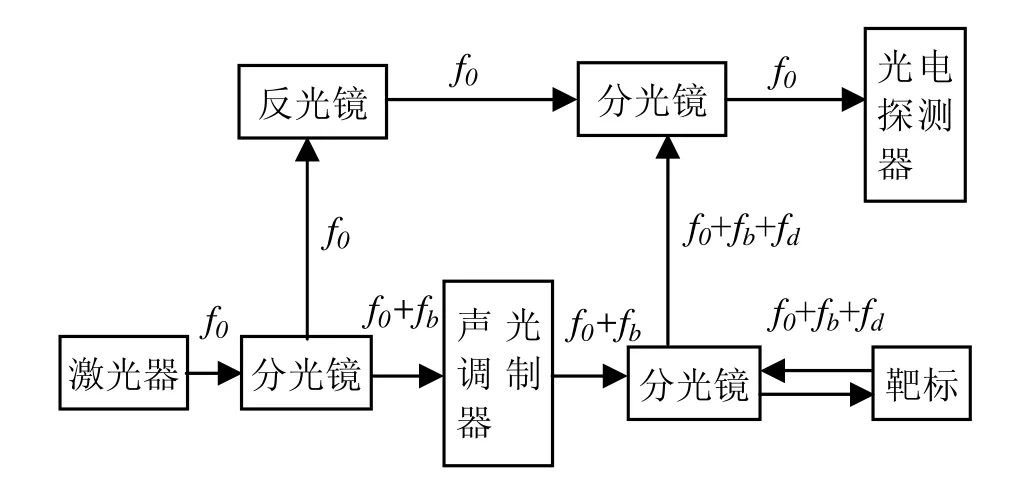
图6 激光测振系统原理图
3.2EMD联合激光测振技术验证分析
数控机床轴承、齿轮发生损伤时,在损失部位会产生冲击脉冲激励,出现振荡衰减的脉冲响应信号,该信号被轴承或齿轮的振动频率信号所调制,则对齿轮或轴承进行故障诊断的理想方法是利用EMD的包络技术,获得损失部位对应特征频率,再利用EMD逐层抽取IMF函数,可以得到识别轴承或齿轮损失程度的结果。应用EMD故障诊断方法,采用激光测振系统,对某型号数控机床的齿轮损失程度监测诊断如下:采样频率为1000 Hz,采样点数512,机床转速2000 r/min,进刀速度60 mm/min,单边进刀量2 mm,采用开发的多通道数据采集诊断系统对机床某处齿轮进行振动数据采集,得到图7所示振动时域信号和图8所示功率谱,图7和图8是在LabVIEW环境中编程实现的。
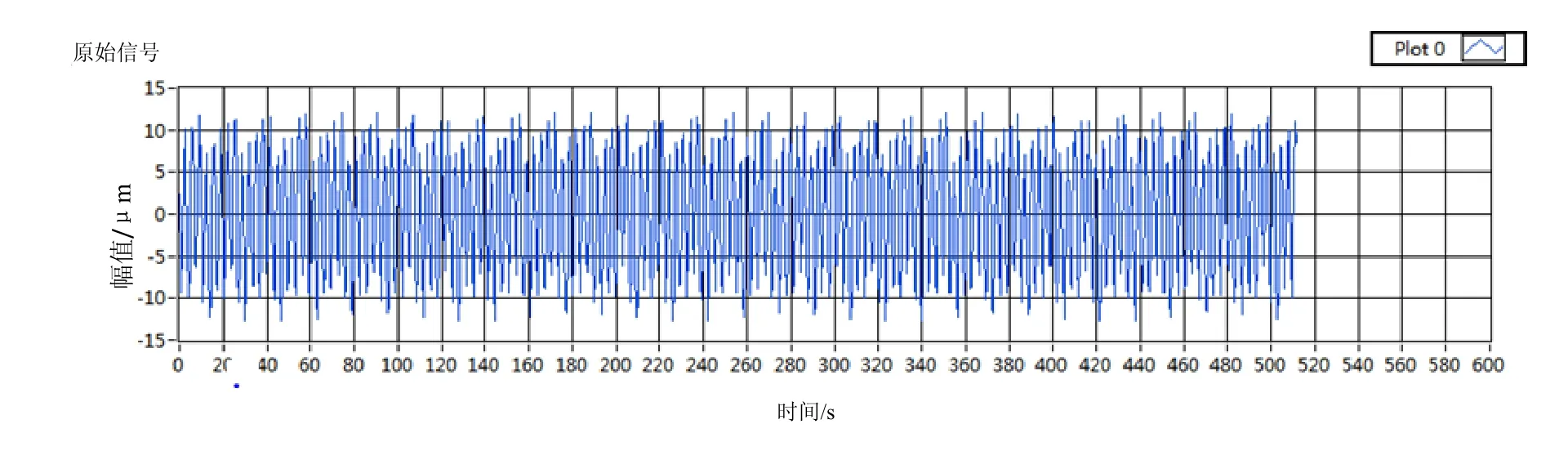
图7 机床齿轮振动信号的时域信号

图8 机床齿轮振动时域信号的频谱图
从图7中可以看到,损伤的齿轮波形有些杂乱,但不太明显,说明齿轮损伤程度不大。但从图8频谱分析图中可以看到,损伤齿轮存在工频或噪声成分,在33 Hz、66 Hz和158 Hz 3处存在着次谱峰、第3谱峰和高谱峰,由于机床转速n=2000r/min,对应频率为f=n60=33.3 Hz 。由此看出,66 Hz谱峰是机床齿轮振动二倍工频,158 Hz的高谱峰与五倍工频166 Hz相近,但不相等,说明齿轮损伤影响着齿轮工频,即振动信号中存在频率调制的现象,且调制频率以一倍工频33.3 Hz为基频。这解释了转子周期性碰撞摩擦的原因:转子每转动一周,摩擦一次,线速度减小一次,摩擦过后,线速度重新恢复为额定值,此即为工频振动分量的频率调制现象。
运用Matlab环境下EMD故障诊断算法继续分析,得到Matlab下基于EMD分解的6个基本模式分量,对应EMD公式中的c1( t)、c2( t)、c3( t)、c4( t )、c5( t)、c6( t)以及最后残差余项rn( t),齿轮振动信号EMD分解结果之残差余项如图9所示。由于数据量比较大,两端点失真的现象从外部边缘延伸至内部数据的长度相对较小,因此,选取信号内部数据进行EMD分析,端点抑制效应的影响会很小,几乎可以忽略不计。对图7的振动数据进行EMD分析的前2个经验模态分解IMF1和IMF2如图10所示。
从图10中可以看到,EMD分解结果的前2个IMF,即IMF1和IMF2的幅值较大,IMF1最大值可达4.8 μm,IMF2的最大值则为2.5μm,而且IMF1和IMF2所包含的频率成分较多,适合对c1( t)、c2( t)作频谱分析,以获得更准确的频率特性信息。
而图11中,EMD分解的后2个IMF,即IMF3和IMF4幅值为0.05μm,幅值较图10小,纵坐标最大幅值几乎是图10的1/100,而且从图形看,IMF1和IMF2的波形与原始信号图7相近,而图11所示的结果低频率区域(0~180 Hz)几乎是水平的曲线。这也就是说IMF1和IMF2包含的原始信号的特征信息较多,IMF3和IMF4包含的原始信息较少。
而图12中,EMD分解的后2个IMF,即IMF5和IMF6纵坐标最大值幅值为0.005μm,幅值更小,纵坐标最大幅值几乎是图11的1/10,是图10的1/1000,整条曲线在低频率区域更趋于一条直线,包含的频率成分更少,已经不适合做频率分析。因此,选取包含原始特征信息较多的IMF1和IMF2进行分析。

图9 齿轮振动信号EMD分解结果之残差余项

图10 齿轮振动信号EMD分解结果之IMF1和IMF2

图11 齿轮振动信号EMD分解结果之IMF3和IMF4

图12 齿轮振动信号EMD分解结果之IMF5和IMF6
从图13所示的IMF1的瞬时频率曲线的频谱图中可以看到,横坐标在频率为33.3 Hz处谱峰最高,出现强烈振动,在33.3 Hz的倍数频出分别出现不同程度的谱峰,这与图8所示的机床齿轮振动时域信号的频谱图相吻合,验证了在转子运转时,轴承与轴瓦之间存在着一定程度的摩擦现象,说明了EMD分析方法的正确性,也使EMD分解法在诊断摩擦故障方面得到了突出表现。
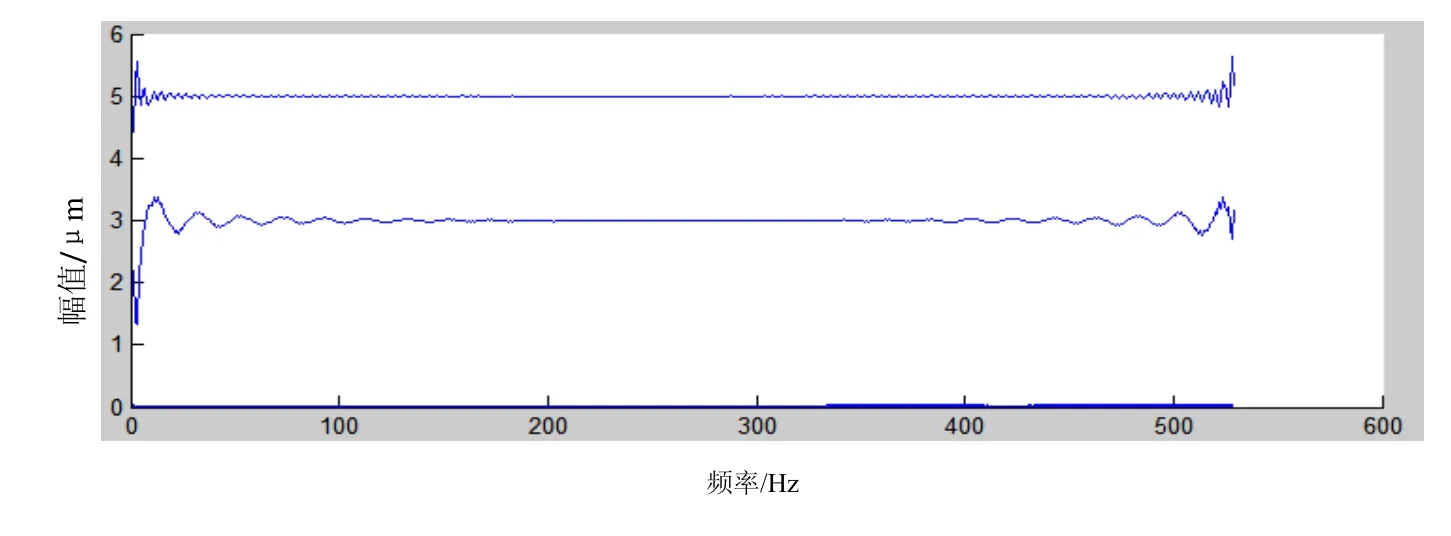
图13 齿轮振动的IMF1的瞬时频率曲线图的频谱图
4 结论
实验结果表明,EMD能从大量的非线性、非平稳信号中提取振动特征信息和相关的模态参数,能够定量地描述频率和时间的关系,通过时频域分析,把信号自适应地分解到不同频带,分解出基本模式分量,再对基本模式分量进行解调分析和包络分析,实现对时变信号完整、准确的分析,无需人为划分频带,层层挖掘数据中的有效信息,提取出局部瞬时频率和信号中的冲击、脉冲、振荡分量等非线性、非平稳信息,在机械动态分析和故障诊断中,尤其在轴承、齿轮的损伤诊断、调制解调振荡信号以及诊断摩擦故障方面,有其独特的优势,且效果明显,是一种非常优秀的非线性、非平稳等时变信号处理方法。
[1] Huang N E, Shen Zheng, Long S R. A new view of nonlinear water waves: The Hilbert spectrum[J]. Annu. Rev.Fluid Mech.,1999,31:417-457.
[2] Yue Huanyin, Guo Huadong, Han Chunming. A SAR interferogram filter based on the empirical mode decomposition method[J].Geosciences and Remote Sensing Symposium, 2001,5:2061-2063.
[3] Yu Dejie, Cheng junsheng, Yang Yu. Application of EMD method and Hilbert spectrum to the fault diagnosis of roller bearings[J].Mechanical System and Signal Processing 19(2005) :259-270.
[4] Huang N E, Shen Zheng, Long S R. The empirical mode decomposition and the Hilbert spectrum for non-stationary time series analysis [J]. Proc.R.Soc.Lond,1988,454:903-995.
[5] Liu B,Riemenschneider S, Xu Y. Gearbox fault diagnosis using empirical mode decomposition and Hilbert spectrum[J].Mechanical System and Signal Processing 2006,20(3):718-734.
[6] Huang N E. A New method for nonlinear and non-stationary time series analysis and its application for civil infrastructurehealth monitoring. NASA Goddard Space Flight Center,Greenbelt, Maryland 20771,USA.
[7] 钟佑明,秦树人,汤宝平.Hilber-Huang变换中的理论研究[J].振动与冲击,2002,21(4):13-17.
[8] Huang N E. A new view of earthquake ground motion data:The Hilbert spectrum analysis[C].Proc. Intl. workshop on annual commemoration of Chi-Chi Earthquake, 2000,Ⅱ:64-75.
[9] Huang N E, Shen Zheng, Long S R. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis[C]. Proceeding of the Royal Society of London , 1998,A(454):903-905.
[10] Deng Yongjun, Wang Wei, Qian Chengchun, et al. Boundary processing technique in EMD method and Hilbert transform[J].Chinese science Bulletin,2001,46(11):257-263.
[11] 谭冬梅,姚三,瞿伟廉.振动模态的参数识别综述[J].华中科技大学学报:城市科学版,2002,19(3):73-78.
[12] 徐小力,许宝杰,韩秋实.大型机械设备在线趋势预测的预测模型及预测方法[C].第十一届全国设备监测与诊断学术会议论文集.北京:中国宇航出版社,2003:80-84.
[13] 胥永刚.机电设备监测诊断时域新方法的应用研究[D].西安:西安交通大学,2003.
[14] 王红军,付瑶.基于多项式拟合的EMD端点效应处理方法研究[J].机械设计与制造,2010(10):197-199.
[15] 许宝杰,张建民,徐小力,等.抑制EMD端点效应方法的研究[J].北京理工大学学报,2006,26(3):196-200.
[16] 许宝杰,徐小力,李建伟.用神经网络插值进行EMD端点效应抑制方法的研究[C].第十二届全国设备监测与诊断学学术会议论文集.北京:机械工业出版社,2006:171-175.
[17] 卢志茂,孙美玲,张春祥,等.基于极值域均值模式分解的语音增强方法[J].系统工程与电子技术,2011,33(7):1680-1684.
[18] 崔宝珍.自适应形态滤波与局域波分解理论及滚动轴承故障诊断[D].太原:中北大学,2013.
[19] 余波.自适应时频方法及其在故障诊断方法中的应用研究[D].大连:大连理工大学,1998.
[20] 盖强.局域波时频分析方法的理论研究与应用[D].大连:大连理工大学,2001.
[21] 叶声华,杨学友,曲兴华,等.激光及光电测试技术[C].叶声华科研团队论文集.北京:机械工业出版社,2013:14-21.
The Research and Application of the EMD Fault Diagnosis with Laser Vibration Technology
Zhang Shenfeng1Cheng Xiaoping2Chen Shizhao1Ye Gang1Song Yunfeng1
(1.Ningbo Shunyu Intelligent Measuring Instrument Co., Ltd. 2. North China University of Water resources and Electric Power)
Experience mode decomposition fault diagnosis method is introduced, the method unifies the concept of instantaneous frequency and promethean combination of time domain and frequency domain, generates the time-frequency domain analysis method, the intrinsic mode function, can highlight local characteristics of data, extract more accurate, more effective original signal characteristic information, and through the decomposition, extract the time domain signal effectively, through the Hilbert-Huang transform, to realize signal's reanalysis in the frequency domain; Laser Doppler vibration technology, has advantages such as anti-jamming, high resolution, high accuracy, non-contact. The subject collects the gear vibration signals of nc machine tool through laser vibrometer, and using empirical mode decomposition method, diagnoses that there exists the periodic friction phenomenon at 33.3 Hz frequency between the bearing and bearing shell, which proves that the EMD can extract vibration characteristic information and the relevant modal parameters from a large number of nonlinear and non-stationary signals, and it is an excellent method in processing nonlinear, non-stationary and time-varying signals.
Empirical Mode Decomposition; Joint Time-Frequency Domain Analysis; Fault Diagnosis; Laser Doppler
张深逢,男,1988年生,硕士,工程师,主要研究方向:机械振动状态监测及故障诊断技术、旋转机械故障诊断技术以及信号分析处理等。E-mail: changgongzsf@163.com
国家重大科学仪器设备开发专项(2013YQ470765); 2015年 宁波市科技创新团队(2013B82005)