可变零力矩点在双足机器人行走控制中的作用
2015-10-21敬成林朱晓铭
敬成林 朱晓铭
【摘要】双足机器人基于零力矩点(ZMP)的行走方式得到了广泛的研究,以前的方法主要是让机器人在离线规划好的ZMP轨迹下行走,这种方式很明显缺乏自适应性。本文分析在线添加可变ZMP的作用,可变ZMP可以用来消除外力干扰、适应不平整地面和姿态控制,这样才与人在复杂环境下步行时实时调整步态相类似。
【关键词】双足机器人;可变零力矩点;自适应性;行走控制
1.可变ZMP的定义
双足机器人在行走过程中将由环境扰动、模型失配等因素引起步态跟踪误差,作者在文献[1]中研究过调节预测控制器参数的方法来消除一些随机扰动,但也很难通过调节参数的方法消除这种跟踪误差。要降低或消除它,就应该考虑ZMP的实时变化,不能只用离线规划好的ZMP作为步行控制器的输入,只有加入了实时变化的可變ZMP,才能使步行模式具有自适应性,所以将期望ZMP表示为考虑了环境变化的表达式:
(1)
左边为期望ZMP。右边第一项为参考ZMP,是由步行速度、步幅和步行周期等参数离线规划好的,一般在行走过程中不发生变化,通过参考ZMP来控制机器人的全局稳定性。第二项为具有实时性的可变ZMP,也就是本文所讨论的可变ZMP,它是根据环境的变化实时加入的,控制机器人的局部稳定性。第三项表示随机扰动,通过作者在文献[1]中的研究,能够通过选择步行控制器的参数消除它。可变ZMP可以用来消除外力干扰、适应不平整地面和姿态控制[2]。很明显,只有考虑了可变ZMP,机器人的步行模式才具有自适应性,才与人在复杂环境下步行时实时调整步态相类似。下文分析可变ZMP的作用。
2.可变ZMP的作用
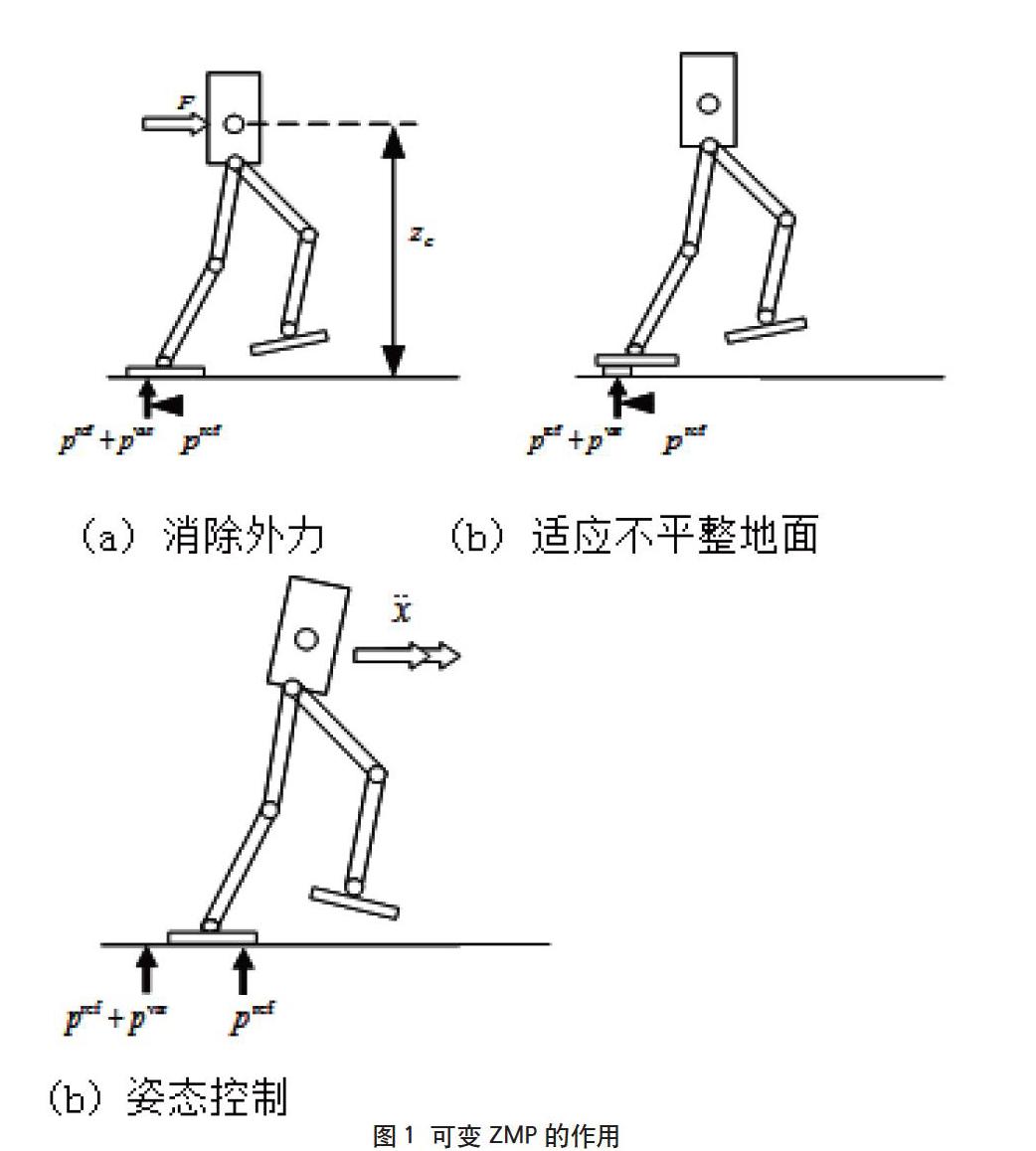
(a)消除外力。如图1(a)所示,当机器人受到外力冲击时,这些外力的合力等价作用于质心的前向水平力F,要想消除这个外力干扰,离线规划好的参考ZMP就要向左移动,这个左移是通过加入可变ZMP来实现的,这也体现了可变ZMP是根据实际环境变化来实时规划的。要使机器人不受外力干扰而稳定,重力相对于可变ZMP产生的力矩必须与外力力矩平衡,则有下列等式:
(2)
其中Zc为质心高度,M为机器人的质量,g为重力加速度。
等式(2)表示在离线规划好的参考ZMP基础上,实时规划可变ZMP量,以便能消除外力干扰。但是,当外力很大时,ZMP移动到脚后跟部位,机器人将绕脚后跟旋转甚至跌倒,这种消除外力的作用也是有限的。
(b)适应不平整地面。如图1(b)所示,当机器人在不平整地面上行走时,此时支撑脚将有一部分与地面失去接触,提前离线规划好的ZMP轨迹点可能将不落在支撑范围内,这时步行模式生成器可以实时添加可变ZMP,及时将参考ZMP移动到脚底与地面接触的支撑区域内,以确保机器人能够稳定地行走。
(c)姿态控制。如图1(c)所示,当机器人的上身由于环境影响向前倾斜时,可以通过模型ZMP控制来恢复平衡。这种控制方式为:当实际机器人的上身与模型的上身相比向前倾斜时,模型上身强力加速,结果目标惯性力变大致使目标ZMP相对于原来的参考ZMP向后移动,这样实际机器人的姿态得以恢复。这种模型ZMP控制方法,在本田双足机器人P2上得到了很好应用。这种情况下,ZMP的移到量,也可以通过在步行模式生成器中添加可变ZMP来实现。
3.结语
本文分析了可变ZMP在双足机器人行走控制中的作用,通常为了设计方便起见,用离线规划好的ZMP作为行走控制器的输入,而没有考虑机器人行走过程中环境的复杂性,这样将导致行走稳定性降低。通过在线规划实时可变ZMP,可以提高双足机器人基于ZMP行走方式的自适应能力。
参考文献
[1]敬成林,薛方正,张华等.双足机器人稳定步行模式的预测控制实现方法[J].仪器仪表学报,2010,31(12):2700-2705.
[2]S.Kajita,F.Kanehiro,K.Kaneko,et al.Biped walking pattern generation by using preview control of ZMP[C]//Int.Conference on Robotics&Automation,Taiwan,china,2003:1620-1626.
作者简介
敬成林(1973-),男,汉族,四川南部县人,博士,副教授。主要研究领域为智能机器人控制.
基金项目
贵州省科学技术基金资助项目(黔科合J字[2012]2097号).
