电力推进系统功率限制控制策略在实船项目中的应用
2015-10-16高志光
高志光
(上海南车汉格船舶工程有限公司,上海 200433)
电力推进系统功率限制控制策略在实船项目中的应用
高志光
(上海南车汉格船舶工程有限公司,上海 200433)
采用电力推进的船舶中,推进系统是作为主要负载直接连接在船舶电网上,推进负荷的突变和电网结构的突变可能引起柴发机组过载、电网震荡甚至全船失电,此时船舶会面临失控的危险,甚至会倾覆,因此推进控制系统必须要与船舶电站进行协调控制,确保船舶电站的稳定和安全。本文针对以上存在的问题通过案例来引入功率限制的控制策略,并分析其实现过程和可行性,最后通过一些试验证明此方案确实可行。
功率限制;电力推进;变频器;船舶电站
0 概述
采用电力推进方式的船舶中,推进系统是整个船舶电站系统中主要的负荷。在恶劣海况下航行时,当船舶电站所有负荷同时满功率运行,由于外部环境的不确定性及负载的异常出现,可能会造成在网发电机组的瞬时超负荷运行,这种状态的反复出现可能会引起整个船舶电站的振荡甚至崩溃。系统正常满负荷运行过程中可能会出现某 1台或几台发电机组的自身故障所引起突然的非正常脱扣或停机而导致船舶电站瞬时运行在超负荷状态,这种状态也同样会引起整个船舶电站系统的崩溃[1]。为了确保船舶电站的稳定和安全,避免出现在恶劣海况下造成船舶倾覆等重大海难,推进控制系统必须要与船舶电站之间进行协调控制,其主要控制策略就是引入推进功率限制功能。该控制策略通过基于可用功率的推进系统功率限制技术[2],配合发电机组异常跳闸等异常事件监测为基础,进行快速功率限制设计,确保船舶电站供电连续性,避免船舶动力丧失。基于可用功率的功率限制技术以下简称“动态功率限制”,而基于发电机组异常跳闸等事件的快速降负荷设计以下简称“快速功率限制”。
1 项目背景
本文以一艘40t浮吊救援工作船(简称浮吊船)项目为例对“功率限制”技术进行阐述,该电力推进系统由上海南车汉格船舶工程有限公司集成并提供。本船是由国家安全总局出资,委托重庆长航东风船舶工业有限公司设计并制造的一艘具备自航能力的起重救援工作船,内河航行,吊机起吊能力40t,主要用于三峡库区的救援。本船总长59.8m、型宽18.0m、型深3.2m、设计吃水1.6m,采用的双机双桨电力推进形式,由变频器来驱动异步电机进行变频调速驱动减速齿轮箱,经由减速齿轮箱改变螺旋桨的转向。电力推进系统中变压器、变频器、变频电机、远程电力推进PLC控制柜及远程操作站的设计制造符合中国船级社(CCS)的最新规范要求。
1.1 电力推进系统单线图
电力推进系统单线图,如图1所示。
本船配置2台600kW主发电机组和1台30kW的停泊发电机组。船上的主要负载有2台500kW电力推进;1台300kW变频驱动的40t吊机;锚绞机、泵、风机、照明、助航设备和其它小负载共计150KW。

图1 40t浮吊船电力推进系统单线图
1.2 工况
本船工况如表1所示。

表1 40t浮吊船工况说明
由表1可知,在停泊工况和船舶抛锚起重工况,推进系统停止工作,无需进行船舶电站功率限制;航行工况下吊机不会工作,2台发电机组总功率为1200kW,总负载为1000kW+150kW,正常情况不会存在过载情况,但是当 1台发电机组出现异常跳闸时,有可能引起船舶电站过载甚至重载,此时需要推进系统进行“快速功率限制”,即快速限制输入功率,减少对船舶电站能量的需求,以确保船舶电站安全和稳定;当单台发电机组向全船负荷供电时,电力推进系统输入功率限定值设置为某一固定值,当实际输出功率值超过此固定值时将被限制输出,将避免输出功率过大引起电站超载。而在吊机工作且需要稳船状态下,母排处于并联运行,“快速功率限制”和“动态功率限制”随时可能由于船舶航行环境及负荷的变化而发生,需要通过一定的控制策略进行限制性保护。
2 功率限制控制策略
图2是本船功率限制控制等相关设备结构示意图。电力推进控制系统作为功率限制控制中心,接受来自配电板功率管理系统(简称PMS)的可用功率信号和快速限制信号,通过综合计算,输出功率限制值给变电力推进控制系统执行功率限制策略。
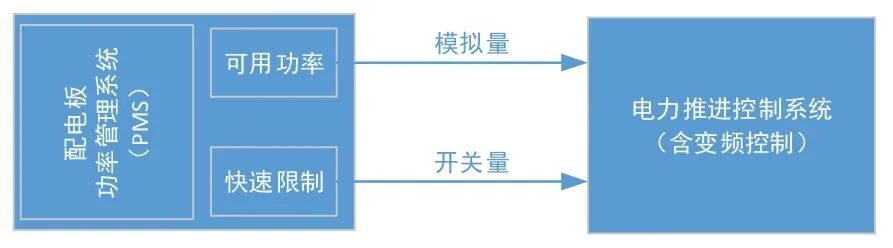
图2 推进功率限制拓扑结构示意图
动态功率限制原理是,在电力推进系统所需输出功率发生变化或其它船用辅助设备负荷发生变化时,PMS实时监测船舶电站可用功率,若可用功率为零,则需对推进输出功率进行限制,推进功率将限制在一定固定值保证可用功率大于零,单船舶电站可用功率超过一下限值后,取消推进功率限制。
电力推进控制系统控制程序流程图如图3所示。当收到PMS过来的快速限制信号时,则系统优先采取“快速功率限制”方法,如快速限制信号消失或没有接收到快速限制信号则采取“动态功率限制”方法。
3 试验波形
3.1 动态功率限制
根据图3所示程序流程图,将PMS检测到的实时可用功率(-600kW~+1200kW)与通过传感器检测到的电机实际输出功率作为电机可输出的最大功率,即电机功率限制值。例如某一时刻,可用功率为-100kW,电机实际功率为300kW,则电机输出最大功率应该限制为200kW,使得船舶电站可用功率增加100kW,不再为负值。很明显,当系统处于动态功率限制状态,推进功率将不随司控器操作指令的增加而增加,直到可用功率变为正值且功率限制功能退出运行。
考虑到推进功率时刻随船舶航行的环境(风、浪、流等)变化而变化,且船舶电站供电的其他船舶辅助设备负载也可能频繁变化[3],致使可用功率信号频繁在调整和波动,如果动态功率限制直接依据此信号调节,势必导致推进功率的波动,而推进功率波动反过来又使可用功率波动,可能引起船舶电站震荡。对于此现象,在实际应用中采取了对限制功率值进行滤波[4],使得动态功率限制调节的频度降低,保证系统稳定性。如图4所示为限制功率值滤波前后对照,其中黄色线代表滤波后曲线,相比绿线代表的滤波前曲线震荡减少,明显平滑。

图3 电力推进系统功率限制控制流程图
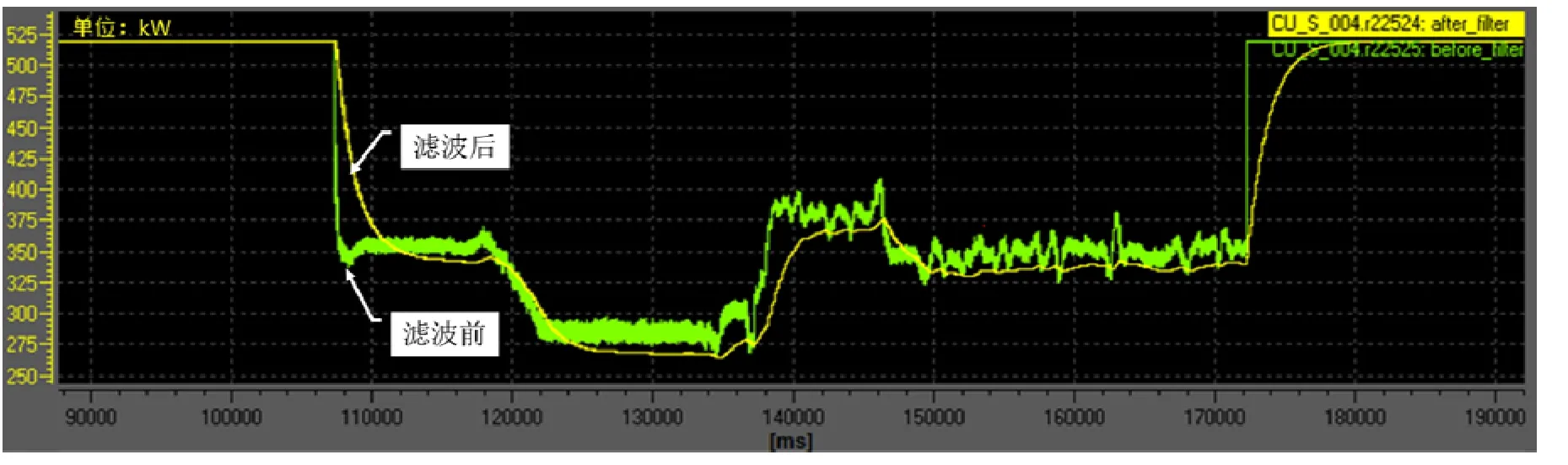
图4 限制功率值滤波前后对照
3.2 快速功率限制
在船舶发电机组并网运行过程中,如果某一套发电机组断路器由于异常或故障发生跳闸现象,就会引起剩余并网发电机组瞬时出现超负荷现象,这就要求必须快速减少船舶电站电力系统载荷,电站管理系统为避免剩余发电机组跳闸而引起整个发电站组解列,发生不可预期的后果。由于要求电力系统保护响应的快速性,前面所述的动态功率限制难以在非常短的时间内降低电力推进系统的输出功率,以缓解整个船舶电站的负荷压力,不够快速原因有两个:其一,正如提及动态功率限制功能中增加了滤波模块,它的应用导致系统响应延迟;其二,电力推进控制接受可用功率信号存在延时,约500ms-600ms,这么大的延时足以使发电机组由于超于其过载能力而出现宕机。因此在这种情况下必须采用更为有效的功率限制方式,即快速功率限制策略。
根据图5所示,快速功率限制作用过程为:当某一套发电机组断路器发生跳闸现象时,PMS通过硬连接线将一个对应的快速限制信号传输给电力推进控制系统,此时电力推进控制系统将直接对变频器给出输出功率180kW(147500ms时刻)的限制值,延迟10s后(157500ms时刻),限制值将以1000kW/min的速度上升至250kW(从157500ms时刻至161500ms时刻约4s),保持稳定,直到快速限制信号消失。
从图5中还可得出一些有益的数据:
1)变频器在功率管理和控制方面具有高度的灵活性,能够在50ms到100ms内增加或减少功率消耗,例如电压源型逆变器的动态响应时间小于50ms,而可控硅整流器(SCR)、周波变频器和电流源逆变器的动态响应时间约100ms左右。从图6左图中可看出变频器功率从450kW降到180kW时间大概为20ms。
2)变频器接受到的可用功率滞后于实际值500ms~600ms。从图6右图中可看出可用功率变化滞后于实际功率变化500ms左右,而实际的可用功率应该和实际功率同步。
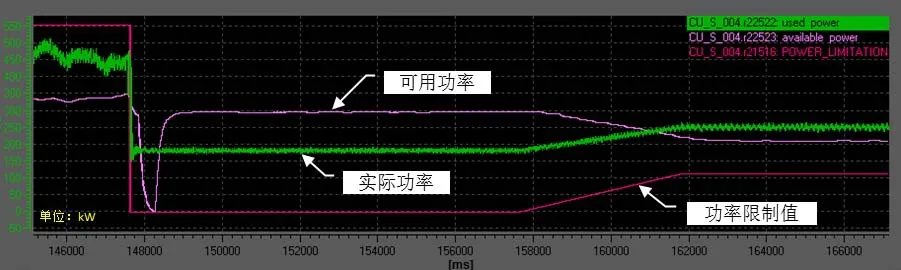
图5 快速功率限制时可用功率、实际功率和功率限制值波形
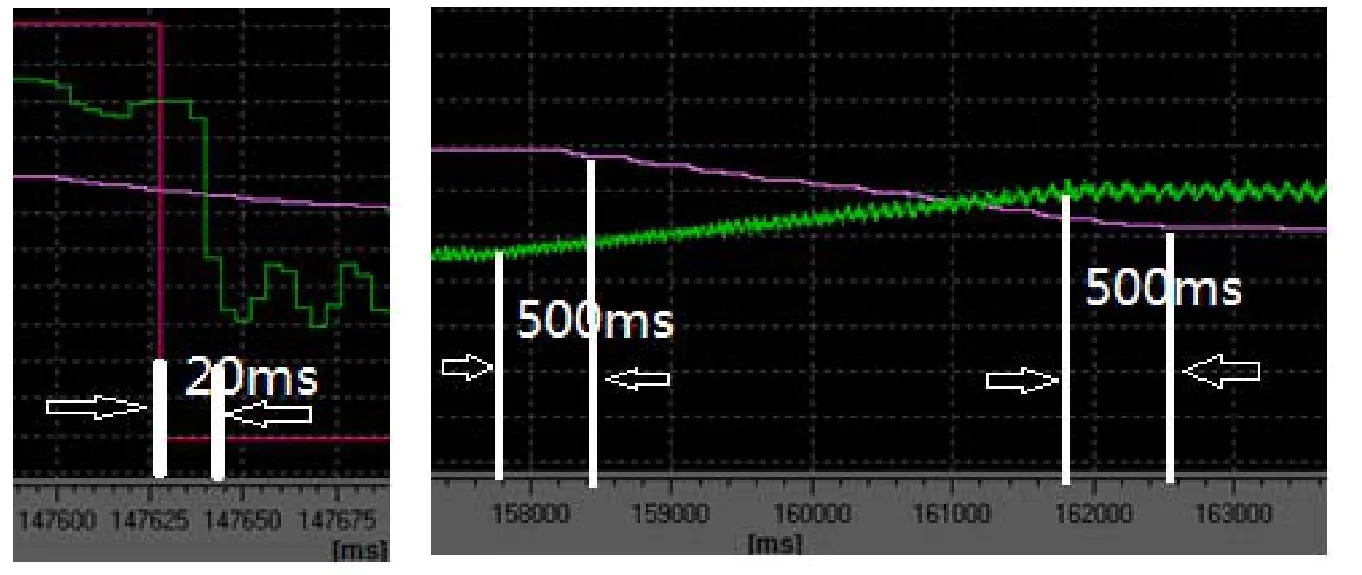
图6 快速功率限制局部放大图
3.3 试验结论
通过以上一些试验数据和试验结果,关键有以下几点需要说明:1)限制值的设定和选择,快速限制初始值分别设定在180kW和250kW,根据对不同设定值的试验结果来看,过大容易使系统不稳定,过小达不到快速功率限制的目的,影响船舶航行安全;最终通过试验和实际航行的数据分析,快速限制最终值设定在 250kW,考虑极端情况下,船舶电站会在一台发电机组运行情况下持续为全船提供电力,此时电站总功率为600kW,两台推进电机共可输出500kW推进功率,保证船舶低速航行并就近安全靠港,预留100kW电力供其它辅助设备使用,从实际应用上较为合理;2)延迟10s的设定,主要考虑防止过快恢复造成电网的振荡,其时间多少根据发电机组特性可在实际调试过程中酌情调整。3)限制值上升速率 1000kW/min,从180kW上升至250kW约4s时间,同样考虑减少对船舶电站的冲击或防止振动。
4 总结
电力推进系统在船舶电站中作为主要负荷,它的快速性和响应直接影响着船舶的安全,特别是功率限制功能的应用更是关键,本文通过实际项目的实施和大量的航行试验,充分验证了所实施的方法和控制策略的有效性和可靠性,在确保船舶电站能够稳定运行以及船舶的可靠航行方面提供了非常重要的保障,在同类型应用中达到了国内先进水平,得到了客户的充分认可和很高的评价,有望在国内电力推进系统项目中得到推广和应用。
[1]方萌,史涛,吴斐文.电力推进系统技术分析与评价方法.船舶,2002(6):52-54.
[2]高海波,高孝洪,陈辉.船舶电力推进几种典型方式的比较 航海技术2006(6):54-57.
[3]沈爱弟,褚建新,康伟.内河船舶电力推进系统设计.上海海事大学学报,2009(6):20-24.
[4]李京炜.浅谈船舶电站自动化系统设计与实现.科技创新与应用2012(8):95.
Application of Power Limitation Control Strategy in Electric Propulsion System On Real Ship
GAO Zhi-guang
(Shanghai CSR Hange Shipping Engineering Co.Ltd,Shanghai 200433,China)
The electric propulsion system is directly connected with the ship power station as the main load.Discontinuous propulsion load and the abnormal power station can lead to generator set overload,grid turbulence and even the whole ship power-loss.Now the ship will face the risk of out of control,even capsized,so the propulsion control system must be coordinated control with ship power station,ensure security and stability of ship power station.In this paper,power limit control strategy is introduced to solve the above mentioned problem,and its implementation procedure and feasibility are analyzed.Finally,this scheme is proved to be feasible by some experiments.
power limitation; electric propulsion; variable-frequency drive; ship power station
U664
A
10.16443/j.cnki.31-1420.2015.04.005
高志光(1977-),男,硕士研究生,研究方向:电力传动系统在船舶推进系统及甲板机械中应用。
