内窥镜检测装置悬臂机构的设计
2015-10-15范晋伟刘益嘉
范晋伟,刘益嘉,陈 玲
(北京工业大学 机械与应用电子工程学院,北京 100024)
0 引言
由于某型药柱内部深达7m,为了能够精确的完成检测和图像采集,必须将装有伺服电机驱动的摄像头深入到药柱内部进行拍摄,而药柱内壁表面由于含有特殊材料,不能与检测机构接触,故不能铺设辅助轨道,同时由于施工场地空间有限,所以最终选择伸缩比较大的非刚性原件作为悬臂机构执行部件。
目前国内比较常用的是选择液压缸作为悬臂,控制精度高,但是液压缸的刚度有限,容易产生较大的挠度。为了达到控制精度,本文设计了一种箱式伸缩悬臂,其结构刚度高,产生的挠度小,且控制精度高,生产制造成本低[1~4]。整体效果图如图1、图2所示。
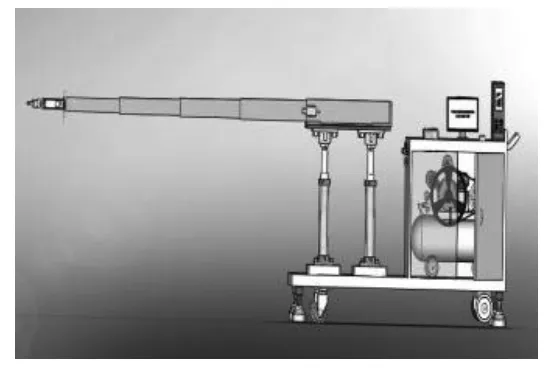
图1 结构图1

图2 结构图2
1 硬件结构
1.1 整体结构
本文设计的内窥镜检测装置如图3、图4所示。

图3 整体结构主视图
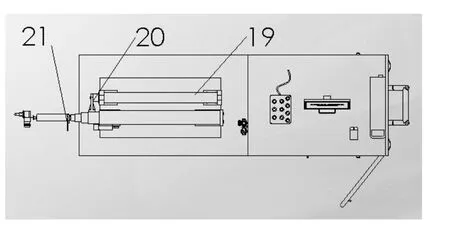
图4 整体结构俯视图
悬臂经过两个气缸连接在底座小车上,通过气缸伸缩控制悬臂的高度。悬臂的高度和伸缩距离通过激光测距仪a、b反馈到工控机,进行控制。悬臂前端通过伺服防爆电机连接摄像头,通过对伺服防爆电机的控制,使得摄像头完成360旋转,进行拍照取样。
1.2 悬臂伸缩机构
由于采集现场的特点,需要悬臂伸出4m,悬臂截面最大宽度小于50mm,且前端需要承载5kg,并保证挠度小于0.1mm,运动控制精度在0.5mm以下。通过实验,最终选择由单击气缸驱动,绳索滑轮传动,定滑轮支撑的多级箱体悬臂机构。
悬臂机构包括全部五级箱体,第一级箱体固定在底板,其余四级箱体同时伸缩,其中有单级气缸安装在第二级悬臂箱体的前端,通过单级气缸的伸缩带动第二级箱体运动,箱体内部通过绳索连接其他三级箱体,则悬臂伸缩过程中,全部四级箱体同时运动。悬臂内部结构图如图5所示。

图5 悬臂总装图
一级箱体1固定在底板上,二级箱体2则通过支撑滑轮12及其他滑轮安装在一级箱体上,并且通过支撑滑轮12及其他定滑轮在一级箱体上滑动,完成悬臂的伸缩。同理,三级箱体通过支撑滑轮13安装在二级箱体上,四级箱体通过支撑滑轮14安装在三级箱体上,五级箱体通过支撑滑轮15安装在四级箱体上。滑轮传动使得各级箱体之间配合紧密,安装紧凑,保证了精度。
当单级气缸伸出时,带动二级箱体2伸出,同时绳索滑轮6一起伸出,而绳索滑轮6的绳索两端分别安装在一级箱体1和三级箱体3上,则同时带动三级箱体3伸出,同理三级3带动四级箱体4伸出,再带动五级箱体5伸出。直至所有整条悬臂伸出量达到最大为止。
当单级气缸回收时,带动二级箱体2缩回,同时绳索滑轮11一起回缩,而绳索滑轮11的绳索两端分别安装在一级箱体1和三级箱体3上,则同时带动三级箱体3回缩,同理三级箱体3带动四级箱体4回缩,再带动五级箱体5回缩。直至整条悬臂所有箱体全部缩回为止。
2 悬臂的刚度检验
由于本套设备的精度要求较高,现场工作时,悬臂的振动和挠度都会对采集数据结果造成较大影响,故利用ANSYS软件对悬臂进行静态刚度检验,保证设备的精度[5~7]。假设E表示五级箱体的弹性模量,J表示五级箱体对中性轴的惯性矩,W表示施加的载荷,L表示五级箱体长度值,Δ表示挠度,kΔ表示五级箱体的刚度。

当五级箱体全部伸出时,在悬臂的最前端产生最大挠度,每级箱体的根部连接处都是危险点。设定整条一级箱体为固定,并在悬臂的最前端施加向下的重力50N和弯矩10N/m模拟伺服防爆电机和摄像头产生的载荷。则得到悬臂的挠度结果和应力结果如图6和图7所示。

图6 五级箱体的应变图
由图6可得,悬臂的最大应变发生在悬臂最前端,应变为0.079mm,而悬臂机构的允许值为0.1mm,则应变值合格。

图7 五级箱体的应力图
由图7可得,悬臂的最大应变发生在悬臂二级箱体与一级箱体的连接处,最大应力为0.226Mpa,而悬臂的铝合金材料的许用应力为90Mpa,则安全。
3 电气控制系统
3.1 气路控制系统
本套设备公有3个单级气缸,两个立式气缸a、b提供悬臂的升降动力。一个平放气缸连接悬臂,驱动悬臂伸缩。气路原理图如图8所示。

图8 气路原理图
空气压缩机1工作从大气中抽取空气储存在储气罐2中,高压空气进入到三位五通电磁换向阀3和4中。电磁换向阀4控制平放气缸驱动整条悬臂的伸缩。调速阀5和调压阀6保证了气缸运动平稳,便于悬臂的精确控制。而电磁换向阀3同时控制两个同步气缸的运动。为保证两个气缸的同步运动,选择完全相同的调压阀和调速阀,并设置同样的压力和速度。
3.2 电路控制系统
本套设备的控制系统采用Visual C++编程的软PLC和工业控制机组合方式。VC++程序以工控机为载体控制两个电磁换向阀、伺服防爆电机和摄像头工作。在立式气缸和悬臂的运动方向分别安装有激光测距仪a和b,能够通过RS232串口实时反馈悬臂的高度和悬臂的伸出距离到工控机,同时伺服防爆电机自带的编码器会实时反馈电机的转动角度数据到工控机。工控机的自动程序每2ms扫描一次,完成对悬臂的高度,伸出距离和防爆伺服电机实时监控,并在设定的位置控制相机进行拍照取样工作。本套设备的逻辑控制图如图9所示。
基于Visual C++开发了控制系统软件,运用Timer计时器,以每2ms一次的频率进行扫描,保证了控制系统的实时性和准确性,控制系统软件界面如图10所示。
4 结束语

图9 逻辑控制图

图10 控制系统软件界面
本文对药柱内窥镜检测装的置悬臂机构进行了改进,为了采集到精确的图像样本,设计了新型的悬臂机构。悬臂机构采用定滑轮和多级箱体的组合模式,结构稳定且运动平稳,并利用ANSYS对悬臂进行了有限元分析,得到的应力应变结果均符合要求,又设计了整套机构的电气控制系统,并基于Visual C++开发了控制系统软件,控制整套系统的运行。本文设计的悬臂机构已经成功应用在药柱内壁表面检测工程中,并取得了良好的效果。
[1]范晋伟,谭福涛,王志远.运动控制器内壁图像采集系统设计与研究[J].机械设计与制造2014,5(5):131-137.
[2]刘海峰,杨兴根.固体火箭发动机无损检测图像质量研究[J].推进技术.2001,4:345-348.
[3]李芳.火炮身管内膛直径检测系统设计[D].长春理工大学,2003.
[4]白素萍,车英.火炮内膛表面粗糙度检测技术[J].长春光学精密机械学院学报,2000,12.
[5]刘刚.QY25汽车起重机副臂有限元分析[J].机械工程师,2010,(6):99-100.
[6]郑夕健,贾超.基于ANSYS的汽车起重机起重臂参数化设计研究[J].机电产品开发与创新,2011,3:125-127.
[7]李新华,陈泽宇,刘洋.基于ANSYS的起重机新型弧弦主梁力学分析[J].制造业自动化,2014,36:79-81.
