纯电动汽车复合电源能量管理的仿真
2015-10-15郝美超
郝美超
(天津理工大学 自动化学院,天津 300384)
0 引言
纯电动汽车具有功耗低、零排放等优点,是汽车行业发展的新宠[1]。实践证明,功率密度低、循环寿命短依然是电化学电池普遍存在的缺陷[2],极大地限制了纯电动汽车的普及和发展。而超级电容具有高比功率、大电流快速充放电、循环寿命长等优点,在汽车行业得到了广泛应用[3,4]。超级电容或蓄电池任何一种单一动力源,都无法达到纯电动汽车对能量源的性能要求。因此,采用动力电池—超级电容组成的复合电源,二者优势互补,蓄电池提供车辆行驶时的平均功率,而超级电容则填补尖峰功率,并且当车辆制动时,超级电容吸收回馈能量,有效地兼顾纯电动汽车对功率和能量的双重要求,提高能量利用率。
1 复合电源储能系统结构及原理
1.1 系统结构
复合电源系统结构图如图1所示。这种结构的特点是可以使超级电容对直流母线的功率波动快速反应,为纯电动汽车加速爬坡时提供较大的瞬时功率,并能迅速吸收直流母线向复合电源系统提供的回馈能量。
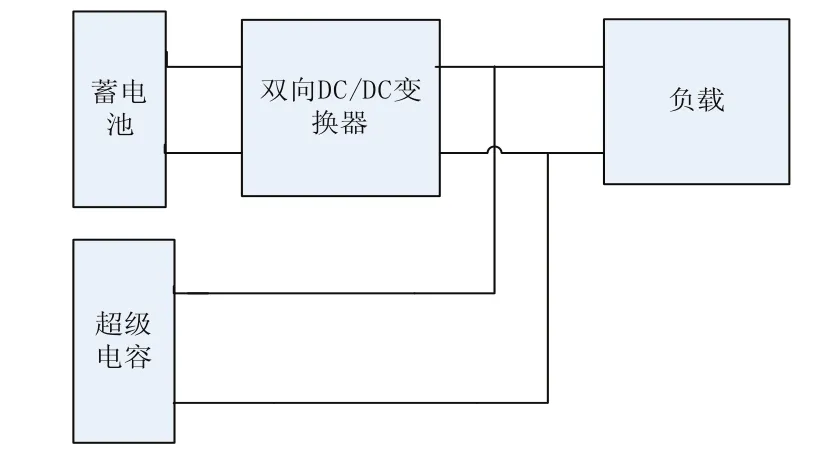
图1 复合电源系统结构图
1.2 工作原理
1)当电动汽车需求功率较低,蓄电池为负载提供能量的同时并给超级电容充电,以保证超级电容始终工作在最佳状态;
2)当电动汽车在加速、爬坡或高速行驶时,负载需求功率较高,此时由超级电容和蓄电池共同提供能量;
3)当电动汽车工作于制动状态,超级电容SOC较大时,回馈的能量由蓄电池和超级电容共同吸收;若超级电容SOC较小时,回馈的能量全部由超级电容吸收。
2 能量管理系统控制策略—模糊神经网络
模糊控制无需知道对象精确的数学模型,可以克服由于过程本身的不确定性、不精确性带来的问题[5,6]。而神经网络具有良好的非线性映射、自学习自适应等能力。由于复合电源能量管理系统是个复杂的非线性系统,模糊神经网络集二者优点于一体,使能量控制过程更具灵活性。
2.1 模糊逻辑控制的设计
由前文复合电源储能系统工作原理的分析,控制策略的制定主要考虑对系统工作影响较大的三个变量蓄电池荷电状态SOCb、超级电容的荷电状态SOCc以及负载电流Io,而能量管理系统是通过控制双向DC/DC变换器的占空比来对蓄电池和超级电容之间功率进行分配。结构框图如图2所示。
本文所设计的模糊逻辑控制是一个三输入两输出的系统,结构图如图3所示。
输入输出变量的模糊化设计如下。
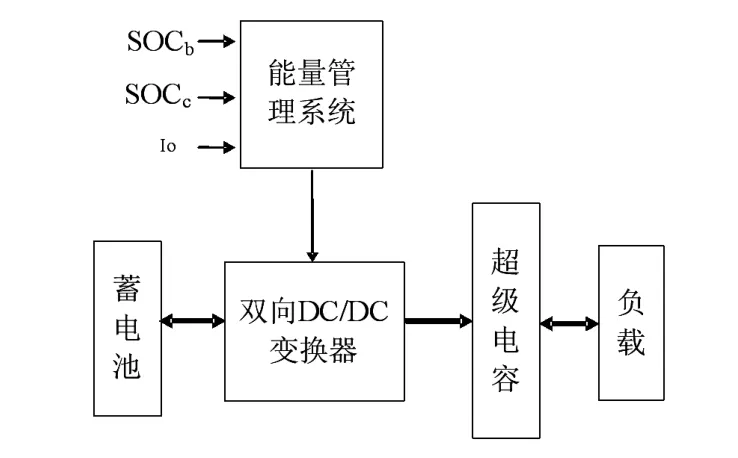
图2 能量管理系统结构框图
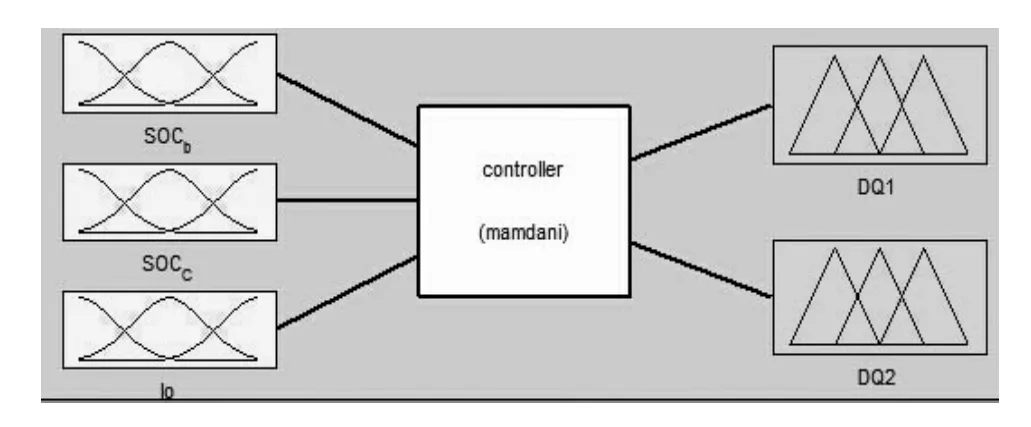
图3 模糊逻辑控制器结构图
由于电动汽车行驶时,电动机会有电动和制动两种情况,所以负载电流也会有正负之别,其对应语言值的模糊子集为:
{负小,负中,负大,零,正小,正中,正大}
为方便起见,采用简记形式如下:
NL=负小,NM=负中,NH=负大,Z=零,PL=正小,PM=正中,PH=正大。
依次设计可得输入变量SOCb、SOCc及输出变量DQ1、DQ2对应语言值的模糊子集分别为:
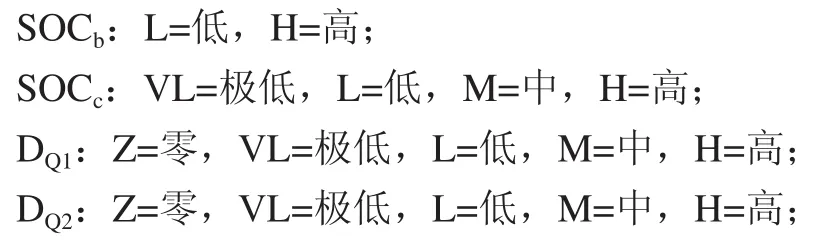
根据专家经验法结合实际情况设计输入变量蓄电池SOCb、超级电容SOCc、负载电流Io以及输出变量DQ1、DQ2的隶属度函数,并根据纯电动汽车运行工况及复合电源工作模式的分析制定相应的模糊规则。部分模糊规则的设计示例如图4所示。
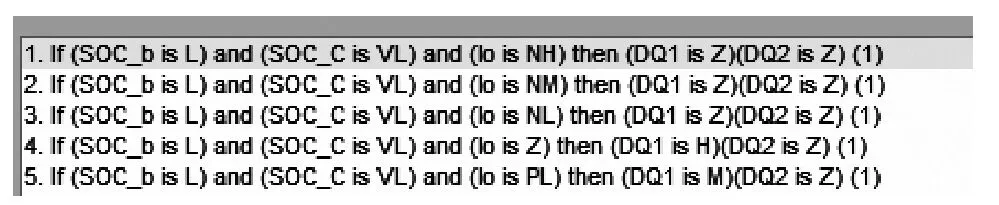
图4 部分模糊规则的设计
2.2 模糊神经网络的构建
图5给出了该模糊神经网络控制模型的结构图。网络各层含义如下:
第一层—输入层:本文输入变量分别为SOCb、SOCc、I0,所以网络第一层有三个神经元。输入层的作用是将接收的数据通过神经元不经变化的传给下一层,所以传递函数为常函数 f(x)=1。
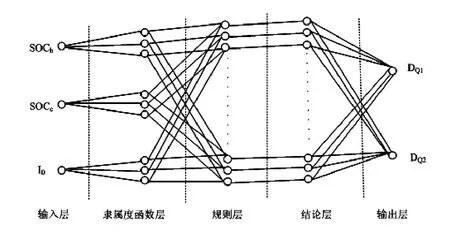
图5 模糊神经网络控制模型
第二层—隶属度函数层:将第一层传来的数据进行模糊化处理,该层中的每一个神经元都代表着一个语言变量,如NH、PL等。神经元所使用的传递函数即为隶属度函数。
第三层—规则层:该层用来实现模糊控制中规则的匹配,并计算出每条规则的适用度。
第四层—结论层:该层用来表示模糊规则所得出的结论,可以看作是规则当中的“IS”,神经元的个数由所有规则得到的结果可能数的总和决定。
第五层—输出层:将前一层得出的结论进行总结,这可以看作是模糊控制当中的“清晰化”过程。
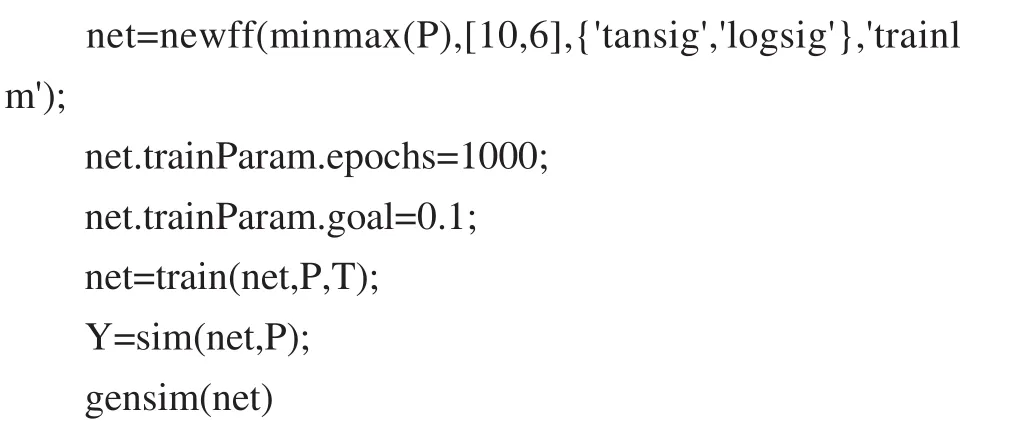
模糊神经网络的仿真实现的部分程序如下:
3 仿真结果分析
3.1 超级电容SOCc不高时
由图6可知,纯电动汽车正常行驶时,电动机工作在电动状态,负载电流为正,如图中的0~7秒。当负载电流较低时,如图中的0~2秒和6~7秒,蓄电池除了提供纯电动汽车行驶所需的能量外,还要对超级电容进行充电,以使超级电容有足够的能量储备,提供瞬时大功率放电;当汽车处于爬坡或加速阶段时,电流达到尖峰,如图中的3~5秒时,超级电容和蓄电池共同供电,超级电容起削峰的作用,有效地保护大电流对蓄电池的冲击;当负载电流为零时,如图中的7~8秒,蓄电池继续为超级电容充电,使超级电容能量保持在最佳状态。从图中0~8秒的电流变化曲线可知,由于超级电容直接与负载相连,能迅速反应负载峰值电流的变化,而蓄电池放电电流基本保持在平均放电状态,放电曲线平缓,有利于延长蓄电池的使用寿命。
纯电动汽车刹车制动时,电动机工作在发电状态,负载电流为负,如图中的8~10秒。由于超级电容能量不高,双向DC/DC变换器不工作,超级电容电流与负载电流重合,纯电动汽车回馈制动的能量全部由超级电容吸收。

图6 超级电容SOC较高时的电流变化曲线
由图7可知,纯电动汽车正常运行时及蓄电池为超级电容进行充电期间,蓄电池持续提供能量,SOC不断降低,如图中的0~8秒;而在纯电动汽车刹车制动时,蓄电池不在提供能量也无能量吸收,所以SOC不在变化,如图中的8~10秒。
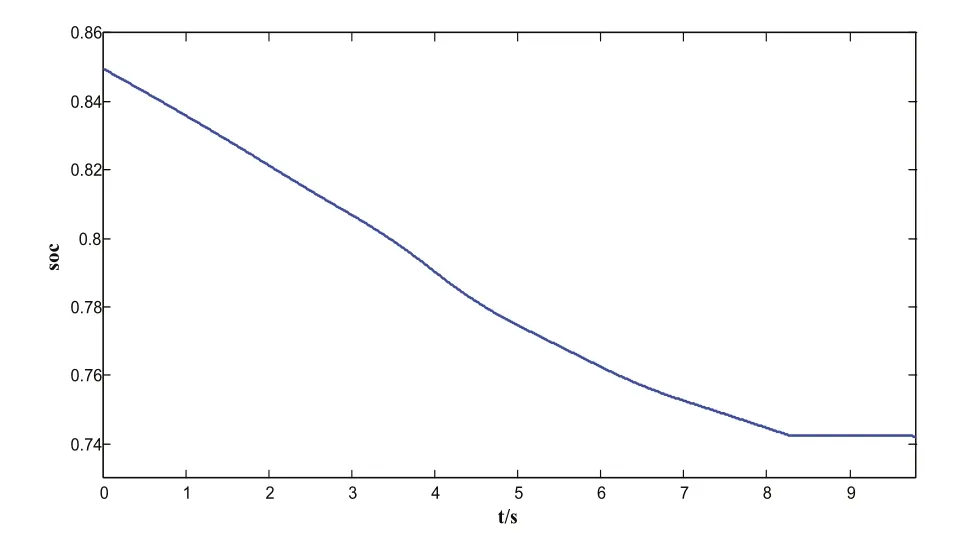
图7 超级电容SOC不高时蓄电池的SOC变化曲线
由图8可知,当蓄电池对超级电容进行充电以及超级电容吸收回馈制动能量时,SOC升高,如图中的0~3秒和7~10秒;当超级电容提供峰值能量时,SOC降低,如图中的3~5秒。
3.2 蓄电池SOCc较高时
由图9可知,在纯电动汽车正常行驶时,如图中的0~8秒,由于超级电容的能量较高,且直接与负载相连,能跟随负载电流变化快速反应,辅助蓄电池共同提供负载所需能量,整个过程中起到了负载平衡和削峰的作用,从而有效地保护了蓄电池 。
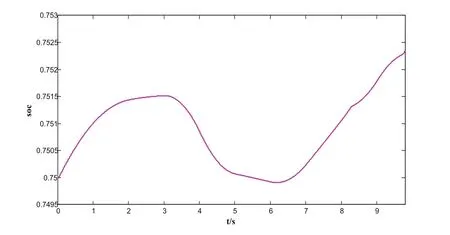
图8 超级电容SOC不高时超级电容的SOC变化曲线
在纯电动汽车刹车制动时,由于超级电容的能量还处于较高的状态,此时双向DC/DC变换器工作在buck状态,超级电容和蓄电池共同吸收回馈制动的能量,以防超级电容过充电现象发生。
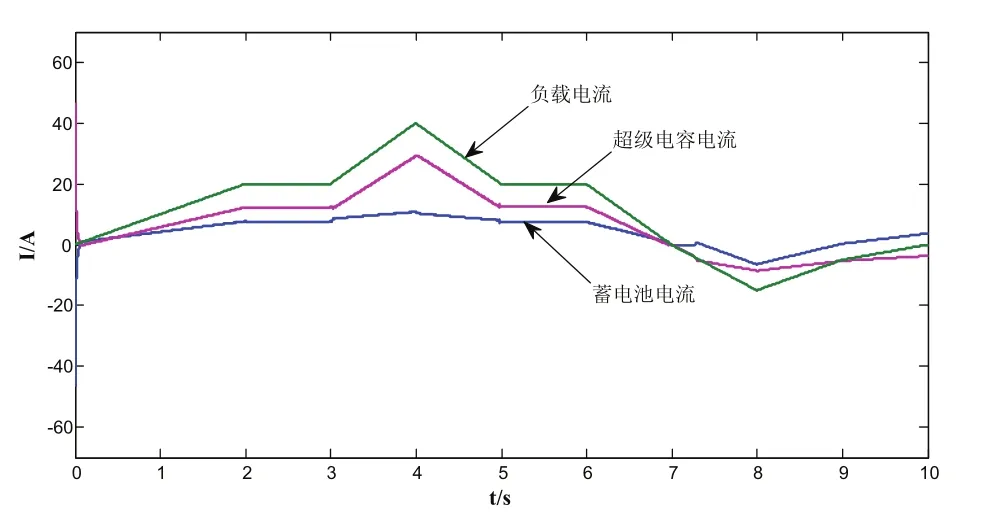
图9 超级电容SOC不高时的电流变化曲线
由图10可知,纯电动汽车正常运行时,蓄电池持续提供能量,SOC不断降低,如图中的0~7秒;而在纯电动汽车刹车制动时,蓄电池参与了回馈制动能量的吸收,所以SOC升高,如图中的7~10秒。
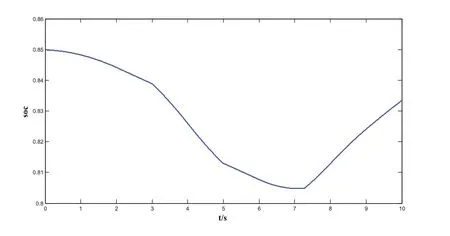
图10 超级电容SOC较高时蓄电池的SOC变化曲线
由图11可知,纯电动汽车正常运行时,由于超级电容能量较高,不仅提供了峰值大功率而且也提供了辅助能量,所以SOC不断下降,如图中的0~7秒;而在纯电动汽车刹车制动时,超级电容吸收了部分回馈制动能量,所以SOC升高,如图中的7~10秒。
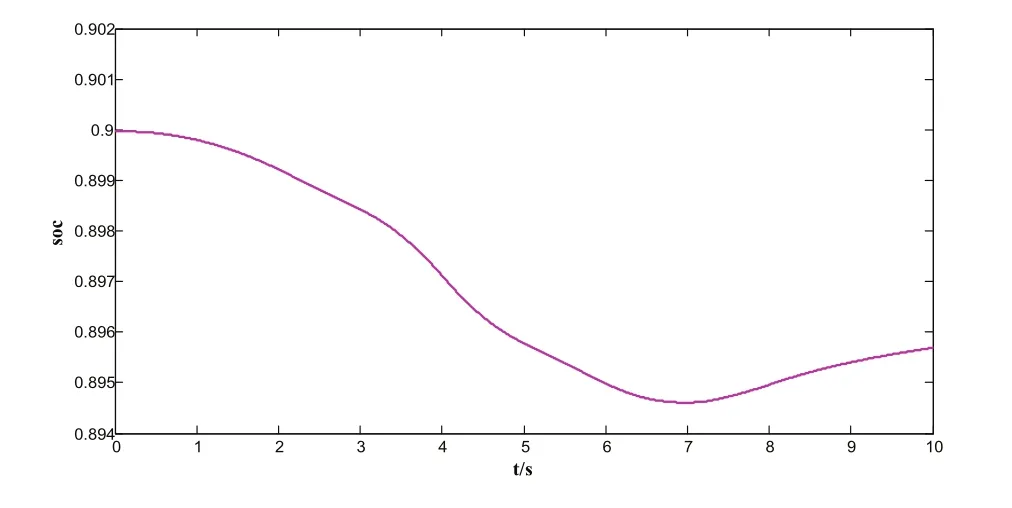
图11 超级电容SOC较高时超级电容的SOC变化曲线
4 结论
综合本文所进行的仿真研究,由超级电容-蓄电池组成的复合电源储能系统,在基于模糊神经网络控制能量管理系统下,充分发挥了二者的优势,较好的保护了蓄电池,提高了能量利用率。
[1]盘朝奉,何志刚,张德望,等.复合电源电动汽车动力系统建模与仿真[J].广西大学学报(自然科学版), 2012,(2).
[2]BURKE A F.Cost-Effective Combinations of Ultracapacitors and Batteries for Vehicle Applications[C]//Proceedings of the Second International Advanced Battery Conference.Las Vegas,Nevada:UC Davis Institute of Transportation Studies,2002.
[3]BURKE A F.Ultracapacitors:why,how,and where is the technology[J].Journal of Power Sources,2000,91(1):37-50.
[4]石庆升,张承慧,崔纳新.新型双能量源纯电动汽车能量管理问题的优化控制[J].电工技术学报,2008,(8).
[5]任国辉.混合动力汽车能量管理系统控制策略研究[J].科技信息,2010,(24).
[6]葛哲学,孙志强.神经网络理论与MATLAB R2007实现[M].北京:电子工业出版社,2007.
