船用轴带无刷双馈发电机标量控制研究
2015-10-14葛启桢殷进军
葛启桢,黎 波,殷进军
船用轴带无刷双馈发电机标量控制研究
葛启桢,黎 波,殷进军
(武汉船用电力推进装置研究所,武汉 430064)
为了验证在船用轴带发电系统中使用标量控制进行无刷双馈发电系统控制的可行性。首先利用闭环标量控制策略的对无刷双馈电机的发电状态进行仿真分析。然后对一台64 kW无刷双馈电机进行独立发电试验并根据实验结果,在普通标量控制的基础上应用一种基于自适应PI的控制策略,通过检测无刷双馈电机的实时工作状态,选取合适的PI参数进行控制。实验结果表明,电机可以在特定船舶轴速范围内空载或带载保持发电稳定。
无刷双馈电机 标量控制 船用轴带发电
0 引言
因为除去电刷环节,无刷双馈电机不需要使用与电机容量相匹配的大功率变流器,其发电系统的使用及维护成本大幅降低。但是需要利用复杂的算法来控制无刷双馈电机的运行。目前主要的控制方法有标量控制[2-3],直接转矩控制[2,4-5],矢量解耦控制等。对于基于标量控制的无刷双馈单机发电方式,文献[1]验证了其可行性和缺陷。
本文针对在船用轴带发电环境下的无刷双馈电机的标量控制策略进行实验,在文献[1]的基础上提出一种基于自适应PI的标量控制策略。
1 无刷双馈电机单机发电原理
1.1 BDFM单机发电运行原理
无刷双馈电机工作在发电工况时,原动机拖动转子以转速n旋转,在p极控制绕组中通入频率为f的三相对称交流励磁电流,在转子绕组中会产生相应感应电流。P极转子磁场在定子P对极绕组中产生感应电势,该感应电势产生定子功率绕组电流也会在转子中产生感应电流。由于控制绕组和功率绕组在转子上产生的感应电流共享同一个转子回路。所以二者产生的感应电流相等。于是可得到控制绕组电流频率f和功率绕组电流频率f的换算关系:
由公式(1),对于变化的转子速n,只需要根据控制策略调整控制绕组的频率f即可使功率绕组的输出电流频率f保持恒定。
功率绕组电压调节规律可以从无刷双馈电机折算后等效电路图分析得出。
当闭环控制系统检测到功率绕组发电电压低于设定值时,可以提高控制绕组给定电流,反之亦然。从图1中可以看出,当控制绕组电流I变大时,控制绕组与转子磁链产生感应电动势增大,在其他情况不变时转子回路电流I增大,由于激磁电流一般不超过10%,可以认为I和I不变,这样功率绕组侧电流I会跟着增大,提高功率绕组侧输出电压[1]。
杨福旺说:“‘百’就是全心全意依靠经销商,我们要建立100“佳”经销商群体,这些经销商都是专业的、专一的、专心的经销商,是我们非常好的战略合作伙伴。”天脊集团拥有一批“粉丝”级的经销商,他们与天脊集团有多年的感情,在多年的经营中,他们见证了天脊化肥卓越的品质,看到了天脊化肥带给农民的丰收画面。因此,在新的形势下,他们更愿意与天脊集团携手同行,深入合作,共同经营市场。
1.2 BDFM单机发电数学模型
在本文的仿真及实验过程中使用的控制绕组控制器均为电压源型变频器。假设无刷双馈发电机的等效异步电机为理想电机,则在静态坐标系下,无刷双馈发电机的数学模型如式(2)所示[1]:
如果将无刷双馈发电机模型由静止坐标系变换到转子速dq0坐标系,则数学模型变为式(3)[1]:
在仿真条件或者实验条件下,可以分别假定某些量为已知,从而适当简化该发电机模型。
2 无刷双馈发电机单机发电控制策略
在独立发电工况下,针对无刷双馈电机的控制对象主要是功率绕组的输出电压和频率,控制目的是保持这两个输出量的恒值稳定。
在发电工况下,电机由原动机拖动,于是发电系统转子速可测。根据上面所述的无刷双馈电机运行规律,通过改变控制绕组激励的幅值以及频率可实现对功率绕组发电电压幅值、频率的控制。下面分析单机发电运行标量控制策略。
2.1 BDFM单机发电运行标量控制
无刷双馈发电机标量控制算法是基于上面所述的原理,当给定转速恒定时,检测到的功率绕组电流频率或幅值增加或者降低,则相应降低或者增加给定的控制绕组电流频率或幅值。于是可以采用如图2所示的功率绕组电压和电流双闭环调节,电压环在外电流环在内,保证了系统的快速性和稳定性。同时为了保证功率绕组输出频率恒定,加上频率闭环。控制系统原理图如图2。
2.2 BDFM发电标量控制仿真分析
根据转子速dq轴模型和电压源模型,输入量为功率绕组端发电给定频率f和电压矢量值U、转速和负载阻抗大小。实验仿真所采用的无刷双馈电机的各参数如下:
功率:64 kW;电压:380V;转速:300~700 rpm;=4;=2;=0.03;r=0.075;r=0.11;r=0.931;=0.04205;=0.16188;=1.0775;=0.11745;=0.33585。
2.2.1 无刷双馈发电机空载建压过程
转速为300 rpm时,采用双闭环控制系统,获得的仿真曲线如图3~5所示。
2.2.2 突加负载扰动的仿真
转速为300 rpm,负载为阻感性负载,功率因数为0.8。仿真时间10 s时由空载突加到半载,15 s时由半载突加满载的仿真曲线如图5~7。

图3 空载建压过程输出电压矢量值的仿真曲线

图4 空载建压过程输出三相相电压的仿真曲线

图5 突加负载时输出电压矢量值的仿真曲线

图6 突加负载时输出三相相电压的仿真曲线

图7 突加负载时输出三相电流的仿真曲线
2.2.3 转速上升变化扰动的仿真
在仿真时间为6 s时,转速由300 rpm变化到450 rpm,获得的输出电压仿真曲线如图8~10。

图8 转速变化扰动对输出电压的影响
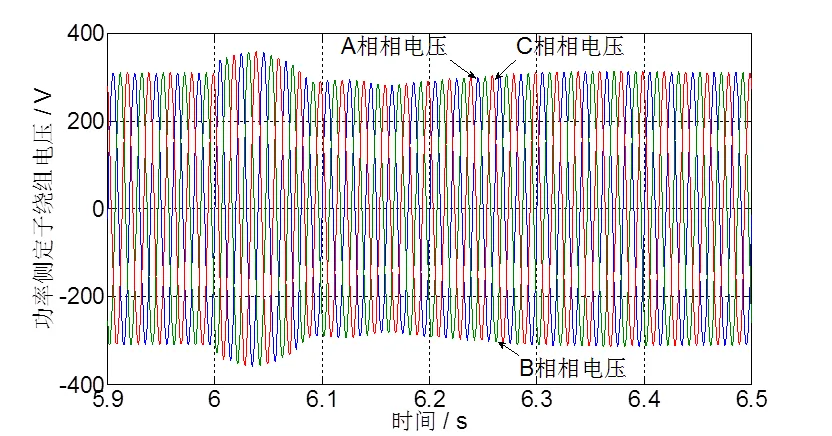
图9 转速变化时输出电压三相相电压的仿真曲线
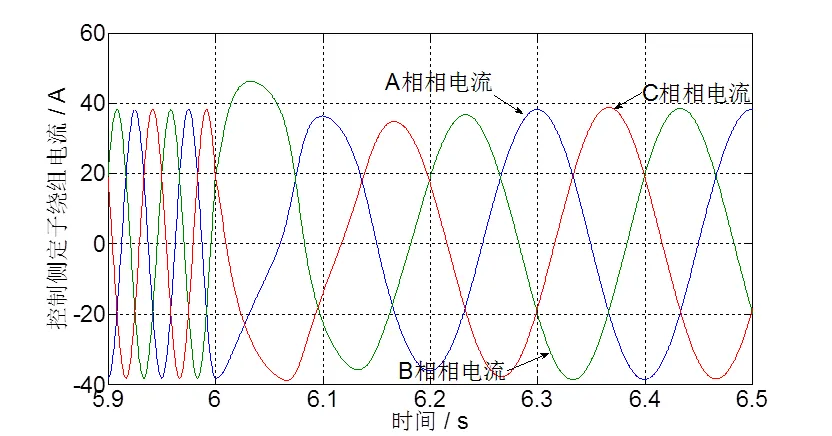
图10 转速变化时控制侧定子绕组电流的仿真曲线
根据标量控制仿真图形分析,可以发现,在启动过程中,系统输出电压波动不大,并且可以很快恢复,但是当负载突变或者转速突然发生剧烈变化时,输出电压的幅值波动将超过20%的限定要求,如果处于船用轴带发电状态,则会对船舶电网造成很大影响。
3 无刷双馈发电机单机发电实验
无刷双馈电机单机发电实验使用的是由长航电机厂生产的64 kW无刷双馈电机搭建的无刷双馈电机实验平台。电机参数为:功率绕组极对数为4,控制绕组极对数为2,同步转速=500 r/min。由于是做独立交流电源使用,这里未提供额外三相交流电源。无刷双馈单机发电的自励过程,由变频器直流母线端给功率绕组侧加压到正常逆变需要的560 V左右的电压,在任意转速下建压起动。

图11空载时,转速n=300,6 s时突变转速至450转
另外由于没有采用能量回馈单元,所以整套实验平台没有进行超同步实验,但是因为超同步和次同步的发电状态区别仅在于相位相反,所以仅进行从起动工况至次同步发电工况最后到同步速工况的实验。
由于无刷双馈电机的工作点会随着转速发生变化,导致在闭环系统中固定的PI参数无法满足在不同转速点的电机工况。于是采用一种自适应PI的方式,建立离线专家知识库,根据不同的工况由控制程序选取合适的PI参数来进行控制。
实验如下,图中三个曲线CH A1 A2 A3由上至下分别是功率绕组电压,功率绕组电流,控制绕组电流,下图表示特定时间段的放大曲线:
可以发现空载时谐波含量大,如小图所示,在转速突变时功率绕组输出基本无变化,仅谐波幅值变大。而加很小的轻载以后谐波有很大改善。
加载卸载实验采用逐步加载至负载满载,然后突卸至空载的方式进行无刷双馈电机实验平台的验证,实验步骤如下:
按照以下步骤加载1.5 kW—4.5 kW—10.5 kW—25.5 kW—46.5 kW,然后突然切换至空载,当转速分别为330转、410转、490转时,测试波形如图13。



图13 转速分别为330转,410转,490转时的测试波形
观察以上图形,可以发现实验结果符合无刷双馈电机的原理。随着转速逐渐接近同步速500转时,控制绕组电流基本为零,功率绕组电流随着负载功率增加而增加。同时根据以上选取的几个转速节点分析可以发现,在次同步转速点至接近同步转速点附近,整个系统在加载卸载过程中的电压都能基本稳定输出,不会出现长时间过大的欠压或者过压。如果在功率绕组输出端加入滤波环节,那么可以有效滤除谐波,使得输出波形可以变得更平滑。
4 总结
实验结果表明,通过采用一种基于自适应PI的标量控制方法时,无刷双馈发电机的稳态性能指标能够达到船用电的使用要求。验证了使用标量控制策略来进行船用无刷双馈电机控制的可行性。但是,在实验过程中,如果发生突加60%以上负载或者存在300以上的转速突变,则容易发生因过压而引发的系统崩溃。在环境更为复杂的条件下,则需要考虑采用更为复杂的控制算法。
综合分析可得知,在船用轴带发电这种动态性能要求不高的场合,采用无刷双馈发电机的标量控制是一种经济且容易实现的方式。
[1] 吴涛.变速恒频无刷双馈发电系统独立运行控制研究[D].华中科技大学博士论文, 2009.
[2] 刘航航, 韩力.无刷双馈电机控制策略发展综述[J].微特电机.2010(6):69-73.
[3] Sarasola I, Poza J, Oyarbide E, et a1.Stability analysis of a brushless doubly fed machine under closed loop scalar current control[C]//IECON 2006-32nd Annual Conference on the IEEE Industrial Electronics. Paris, France: IEEE Industrial Electronics, 2006: 1527-1532.
[4] Brassfield W R, Spée R, Habetler T G. Direct torque control for brushless doubly fed machines[C]// Conference Record of the IEEE Industry Application Society Annual Meeting. Houston, TX, USA: IEEE, 1992, (1): 6l5—622.
[5] 杨俊华, 吕惠子, 吴捷, 杨金明. 基于波波夫超稳定性的无刷双馈电机直接转矩控制[J].中国电机工程学报, 2009, 29(15):107-113.
Marine Shaft Brushless Doubly-fed Generator Based on Scalar Control Theory
Ge Qizhen, Li Bo, Yin Jingjun
(Wuhan Institute of Marine Electric Propulsion,Wuhan 430064, China)
TM31
A
1003-4862(2015)02-0059-04
2014-10-08
葛启桢(1990-),男,硕士研究生。研究方向:无刷双馈电机控制策略。