永磁同步电机转子初始位置检测方法
2015-10-14李明勇
何 鑫,李明勇,高 跃
永磁同步电机转子初始位置检测方法
何 鑫,李明勇,高 跃
(武汉船用电力推进装置研究所,武汉 430064)
使用增量式编码器关键在于确定转子的初始位置。本文基于永磁同步电机数学模型,提出了一种转子初始位置定位方法。该方法采用二分法选择电流矢量试探角度,根据转子转动方向不断缩小初始位置范围。实验结果表明,该方法能迅速准确完成转子初始位置定位。
永磁同步电机 转子初始位置 增量式编码器
0 引言
永磁电机控制方案一般采用经典的转速、电流双闭环矢量控制系统,矢量控制闭环依赖于电机的转子位置信息。转子位置信息通常通过安装在永磁电机上的增量式光电编码器来获得,使用增量式编码器关键在于确定DSP控制程序中光电脉冲计数器的基准值,即转子的初始位置。
在采用增量式光电编码器的控制系统中,为确定转子的初始位置,常用的方法是给定一个方向固定的电流矢量,将电机转子磁极强行拉到给定位置,这种方法实现简单,但定位过程中转子会产生较大扭动,在某些要求转子不动的特殊的应用场合该方法并不适用[1,2];一些学者采用高频注入法来检测初始位置,但需要额外设计滤波器和解析位置信息算法,实现起来比较复杂[6,8];也有学者利用电机的磁饱和特性来检测转子的初始位置,但这要依赖于电机本身的参数[4]。
本文提出了一种基于增量式光电编码器,采用二分法选择试探电流矢量角度,通过检测转子微动方向缩小转子初始位置范围,最终确定转子的初始位置的方法,并进行了实验验证。
1 永磁同步电机矢量控制原理
永磁同步电机矢量控制原理图如图1所示,控制系统采用转速、电流双闭环控制,转速和坐标变换角度通过增量式光电编码器得到。
转速反馈值与转速给定比较,差值经转速PI调节器生成q轴电流给定值;d轴电流给定为0,即;永磁同步电机定子电流由电流传感器采样送入DSP,经3S-2S坐标变换得到d、q轴电流反馈值;d、q轴电流反馈与得到的给定值比较,差值经电流PI调节器得到输出电压d、q轴电压参考值、;、再经2S-3S坐标变换得到逆变器输出电压参考波,再由SPWM模块得到三相桥各个开关管的开关信号。
2 转子初始位置检测原理
根据永磁同步电机在d-q坐标系下的数学模型,永磁同步电机在d-q坐标系下的电压方程为:
式中:u、u为d、q轴方向电压;i、i为d、q轴方向电流;L、L为d、q轴电感;r为定子内阻;为微分算子;ψ为转子永磁体磁链;为转子角速度。
转矩方程为:
运动方程为:
其中:T为电磁转矩;T为负载转矩;ω为转子角速度;n为电机极对数;为电机转动惯量;为阻尼系数。
对于表面式永磁同步电机,L=L,于是转矩方程为:
根据第1节介绍的永磁同步电机矢量控制原理,当d、q轴电流参考值确定、坐标变换角度确定,变频器就能在d-q坐标系下输出一个幅值、方向确定的电流矢量,如图2所示。假设电机转子初始角度为,当给定子电流施加幅值为i,方向为θ的电流时:
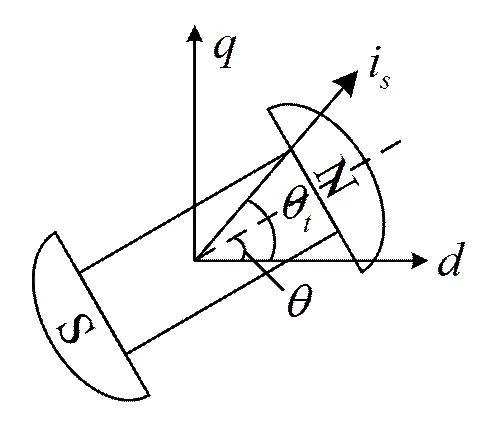
图2 定子电流矢量图
此时电机转矩可写为:
电机启动时,ω=0,则运动方程可写为:
若给定定子电流幅值大小足够,可以满足当0<θ– θ<π时, T–T>0,电机逆时针转动;当π<θ– θ<0时,T–T<0,电机顺时针转动;当θ– θ=0或θ–θ=π,电机不转;由此不断试探,通过电机转子的转动方向判断转子初始位置。
3 转子初始位置程序检测设计
根据转子初始位置检测原理,结合二分法查询,可以根据如下程序流程图设计位置检测程序。假设电机转子初始角度为,程序开始,初始化起始范围0~2π,初始试探角度θ=π,定子电流给定、。
每个循环周期判断编码器脉冲计数器增减方向,即转子微动方向,一旦转子转动(),则立即封锁PWM脉冲。若转子正转,θ>0,测试角大于转子初始位置角,0<θ–<π,更新测试角度范围上限;若转子反转,θ<0,测试角小于转子初始位置角,-π<θ–<0,更新测试角度范围下限;然后测试角更新,取新范围的中间值,θ=(1+2)/2,如此往复,不断缩小测试角范围,最终,转子几乎不转动,θ=0,得到的测试角度即为转子初始位置角。
由于程序主循环周期太短,为毫秒级,再考虑整个控制系统的响应时间,电流矢量给定后,需要再经过若干个循环,即t时间,编码器脉冲计数器才会变化。因此当θ=0时还要判断是否经过了t时间,若过了t时间转子计数器仍没有变化,才能认为转子初始位置角定位结束。t值的确定可以给定不同方向的电流矢量,测试需要经过多少个循环后,电机才会转动,以其中测得时间最久情况为基准,t可取最大时间的1.5倍。
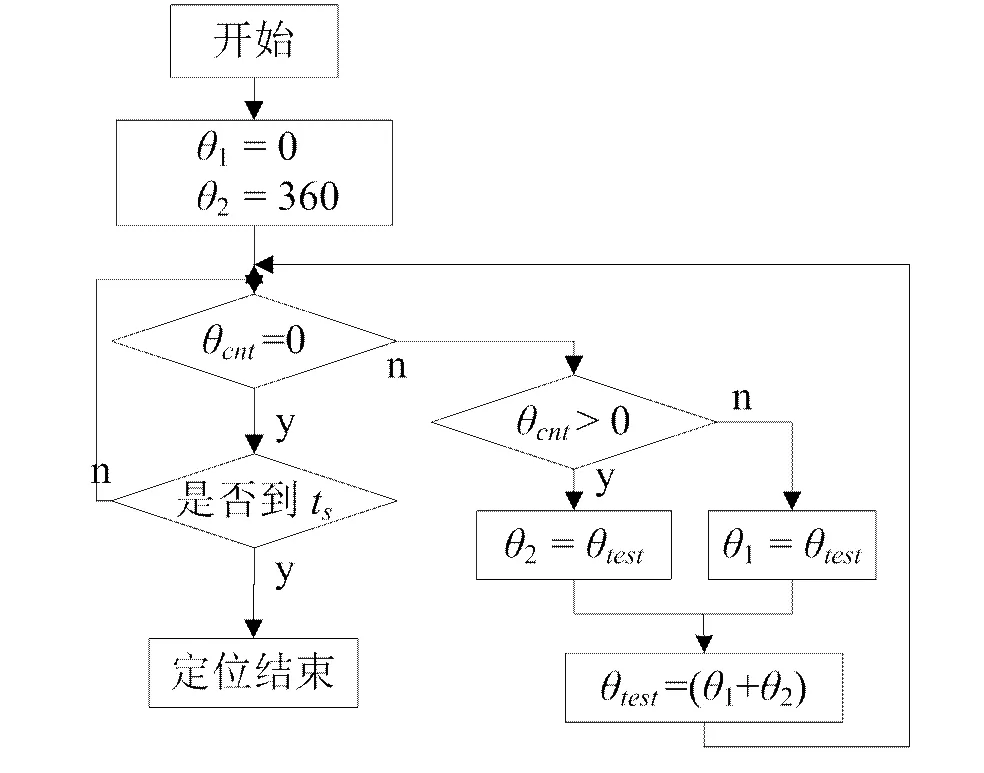
图3 程序流程框图
4 实验验证
根据上一章节程序流程图编写DSP程序,控制器DSP芯片为TMS320F2812,实验电机一台3相22 kW表面式永磁同步电机。增量式编码器型号为FINS5810A593 R/5000,线数为5000,电机旋转一周,编码器共产生20000个脉冲。
实验中每次测试角度更新,记录下测试角度,通过CCS变量观测窗口记录下各个测试角度,具体结果如下:
实验1:转子初始位置角42°,测试角各次更新情况如表1所示。
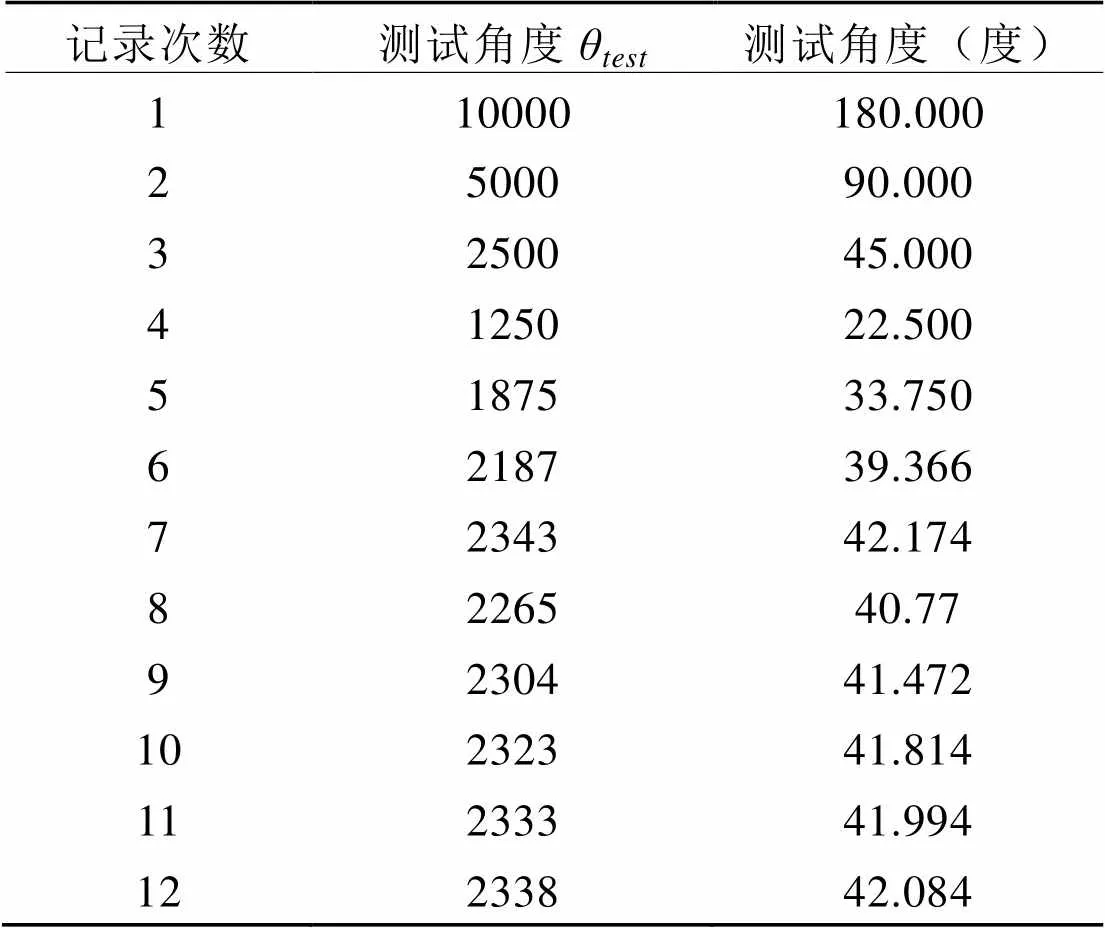
表1 测试角度记录(θ=42°)
根据表1所记录的数据,经过12次缩小范围后,电流矢量试探角度快速逼近实际转子初始位置,最终测得电机转子初始位置角度为:42.084°,与实际转子初始角42°相差不大,测试角逼近过程如图4所示。
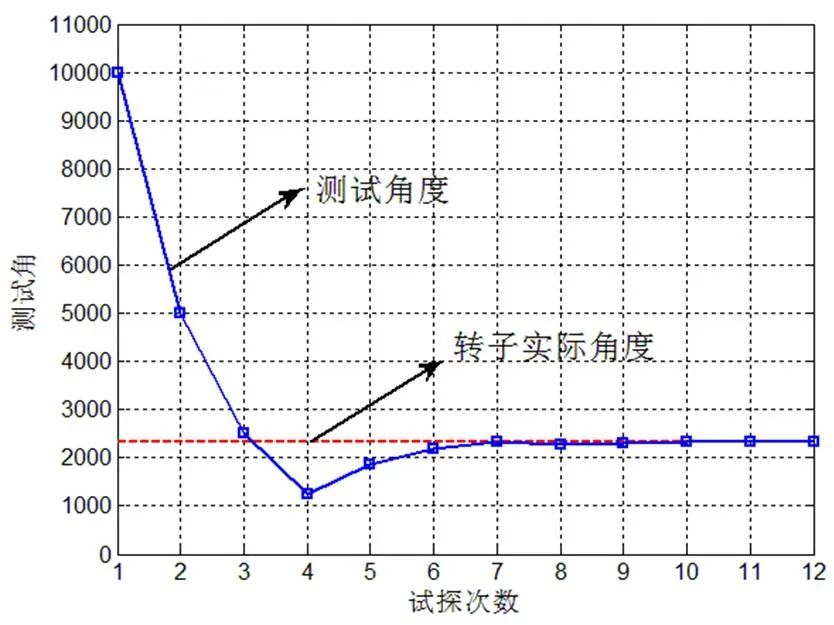
图4 测试角度逼近过程(θ=42°)
实验2:转子初始位置角348°,测试角各次更新情况如表2所示。
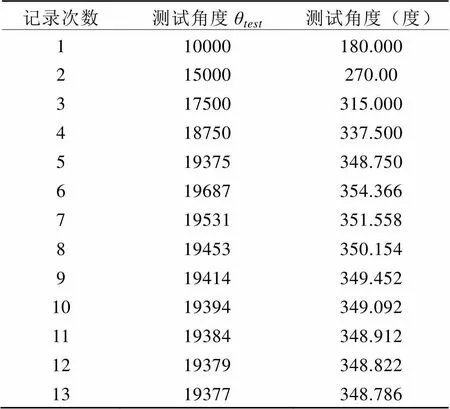
表2 测试角度记录(θ=348°)
根据表2数据,测试角逼近过程如图5所示。转子初始位置角348°的情况,程序依然能不断缩小测试角范围,最终经过13次更新后测得转子初始位置角度为:348.786°。
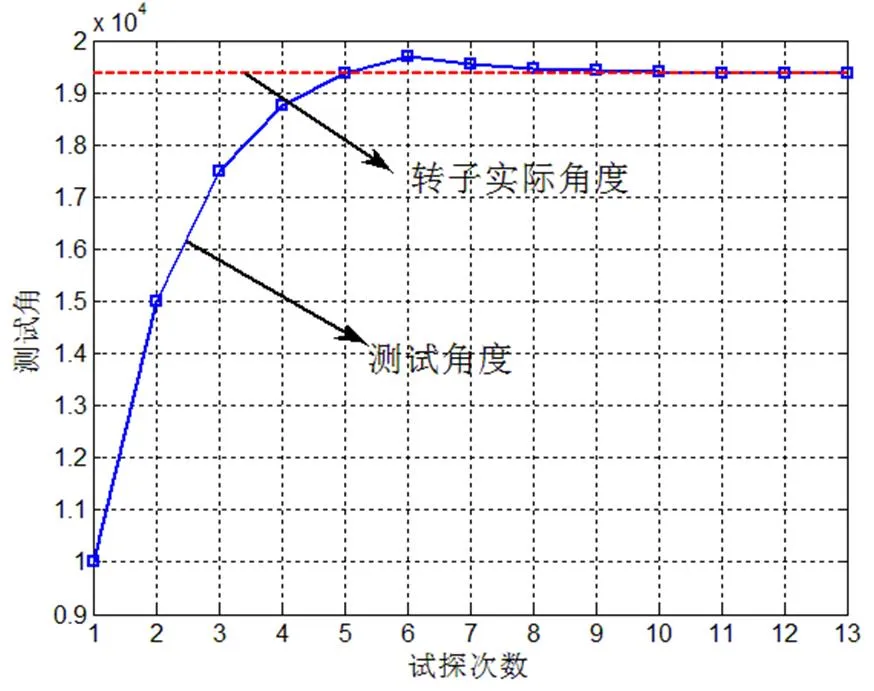
图5 测试角度逼近过程(θ=348°)
根据以上两次试验结果可以看出,转子初始位置角度在0~π、π~2π范围内,程序都能在13次试探后检测出实际转子初始位置。
5 结论
本文提出了一种基于增量式光电编码器,采用二分法选择电流矢量试探角度,通过检测转子微动方向缩小转子初始位置范围,最终确定转子的初始位置的方法。该方法简单实用,定位迅速,精度高,还能保证检测定位过程中转子基本不动。
[1] 贾洪平, 贺益康.基于高频注入法的永磁同步电动机转子初始位置检测研究[J].中国电机工程学报, 2007, 27(15): 15-20.
[2] 刘颖, 周波, 李帅, 等.转子磁钢表贴式永磁同步电机转子初始位置检测[J].中国电机工程学报, 2011, 31(18): 78-84.
[3] 陈荣.基于增量式光电编码盘的永磁同步电机转子位置初始定位[J].电机与控制应用, 2007, 34(3): 32-34.
[4] 张剑, 温旭辉, 刘钧, 等.一种基于DSP的PMSM转子位置及速度估计新方法[J].中国电机工程学报,2006,26(12): 144-148.
[5] 黎永华, 皮佑国. 基于磁定位原理的永磁同步电机转子初始位置定位研究[J].电气传动,2010,40(3): 28-31.
[6] Chung Dae-Woong, Kang Jun-Koo, Sul Seung-Li.Initial rotor position detection of PMSM at standstill without rotational transducer[J].IEEE, 1999: 785-787
[7] Nakashima S, Inagaki Y, Miki I.Sensorless initial rotor position estimation of surface permanent magnet synchronous motor [J].IEEE Trans.on Industry Applications, 2010, 36(6): 1598-1603.
[8] Mohamed B.Implementation and experimental investigation of sensorless speed control with initial rotor Position Estimation for Interior Permanent Magnet Synchronous Motor Drive[J].IEEE Transactions on Power Electronics, 2005, 20(6): 1413-1422.
A Method of Initial Rotor Position Detection for Permanent Magnet Synchronous Motors
He Xin, Li Mingyong, Gao Yue
(Wuhan Institute of Marine Electric Propulision, Wuhan 430064, China)
.
TM351
A
1003-4862(2015)02-0077-04
2014-11-07
何鑫(1990-),男,硕士研究生。研究方向:电力电子与电力传动。