基于五相三电平全桥逆变器中点电位控制算法研究
2015-10-14何钰明胡传西
阮 会,何钰明,胡传西
基于五相三电平全桥逆变器中点电位控制算法研究
阮 会,何钰明,胡传西
(武汉船用电力推进装在研究所,武汉 430064)
基于三相三电平SVPWM算法,通过合理选择工作电压矢量及开关作用顺序,计算开关周期内各电压矢量作用时间,推导出五相三电平全桥SVPWM算法;提出利用冗余矢量、结合负载电流方向调节中点电位的控制算法,并对其进行了仿真、实验验证,具有很好的工程应用价值。
中点电位平衡调节 三电平 五相 SVPWM
0 引言
随着舰船电力推进技术的快速发展,对舰船电力推进装置的功率要求越来越大、电压等级越来越高,传统的三相两电平逆变器无法满足要求,而多相三电平逆变器以其输出电压谐波小、可靠性高、对电机的绝缘损害低、EMI低等优点使得其适合舰船电力推进系统的应用。
多相三电平逆变器工作时,存在零电平等续流过程,电流会流出或流入中点,对电容进行充电或放电,使电容中点电位失去平衡,导致输出电压谐波含量增加,影响功率器件、直流侧电容的使用寿命和设备安全,严重制约了多相三电平逆变器的广泛应用。
21世纪前后,国内、外学者先后对三电平逆变器中点电位平衡调节算法开展了研究。主要采取了根据负载电流的方向选择对中点电位相反作用的电压矢量来调整中点电位,其研究主要集中在三相三电平全桥上,对五相三电平全桥逆变器中点电位平衡调节算法研究甚少。如何解决五相三电平全桥逆变器中点电位偏移问题,使其能被广泛应用,成为一个迫在眉睫的研究课题。
本课题正是在此研究背景下开展的,基于推导出的五相三电平SVPWM调制算法,本文通过分析五相三电平全桥逆变器开关矢量对中点电位的影响,提出了一种利用冗余矢量、结合负载电流方向调节中点电位的控制算法。
1 五相三电平SVPWM调制
五相三电平全桥逆变器拓扑结构如图1所示,各相输出电压有三个状态(1、0、-1),用开关函数Sj(j=A、B、C、D、E)表示,五相合成电压矢量可表示为:
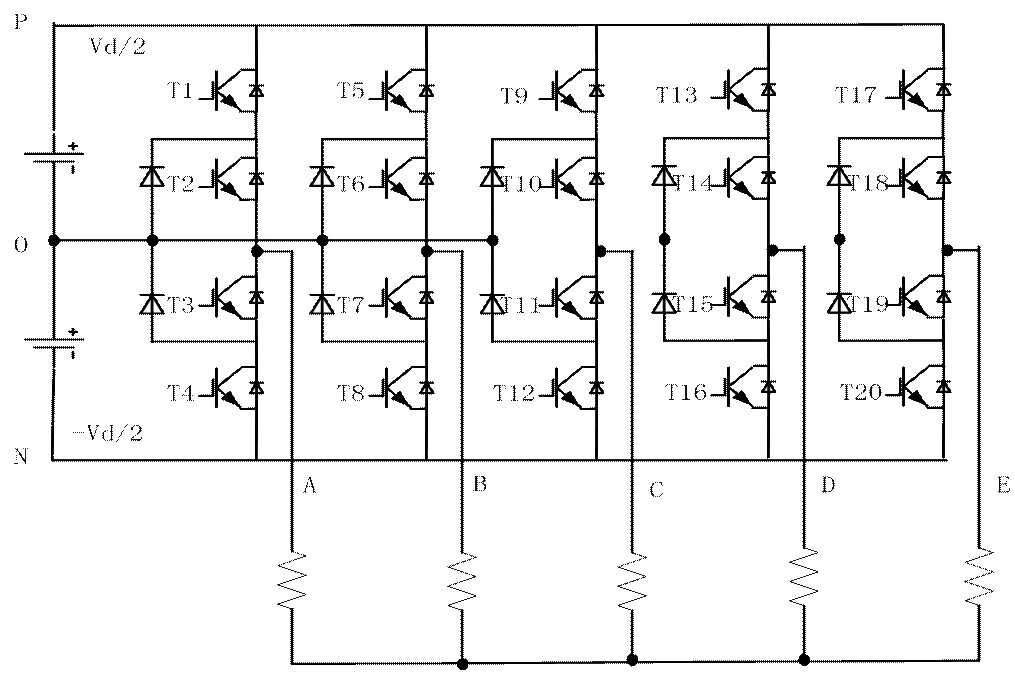
图1五相三电平全桥逆变器拓扑结构图
根据公式(1)计算可得,共有243个合成电压矢量,这些矢量按照幅值分成14组,分别为0.6472V、0.6156 V、0.5236 V、0.4472 V、0.4 V、0.3804 V、0.3236 V、0.2472 V、0.2352 V、0.2 V、0.1454 V、0.1236 V、0.0764 V、0,为了简化矢量合成过程和提高电压利用率,选取幅值0.6472 V、0.6156 V、0.3236 V、0共43个有效矢量,矢量分布如图2所示:
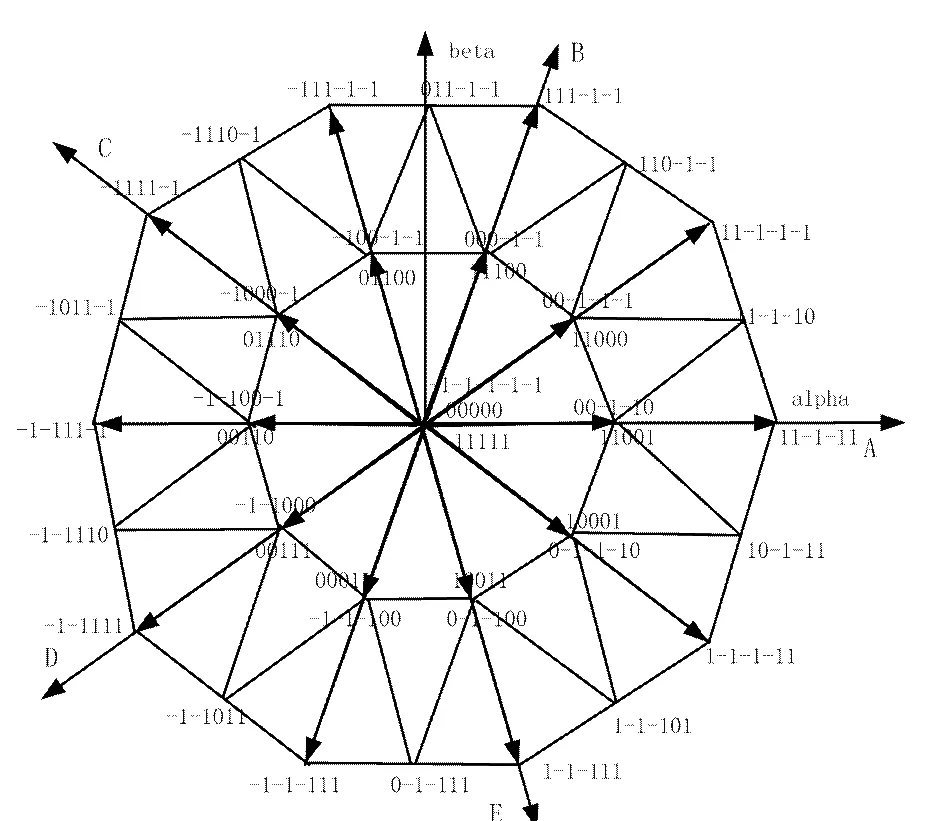
图2 五相三电平全桥空间电压矢量分布图
为了获得任意角度和绝对值可控的电压矢量,采取相邻两个特定矢量及零矢量合成电压矢量,计算合成电压矢量的各特定矢量作用时间,我们将360°的区间等分成10个扇区,并根据静止两相坐标系下的电压矢量大小和相互关系来判断合成电压矢量落在那个扇区,判断条件如表1所示:
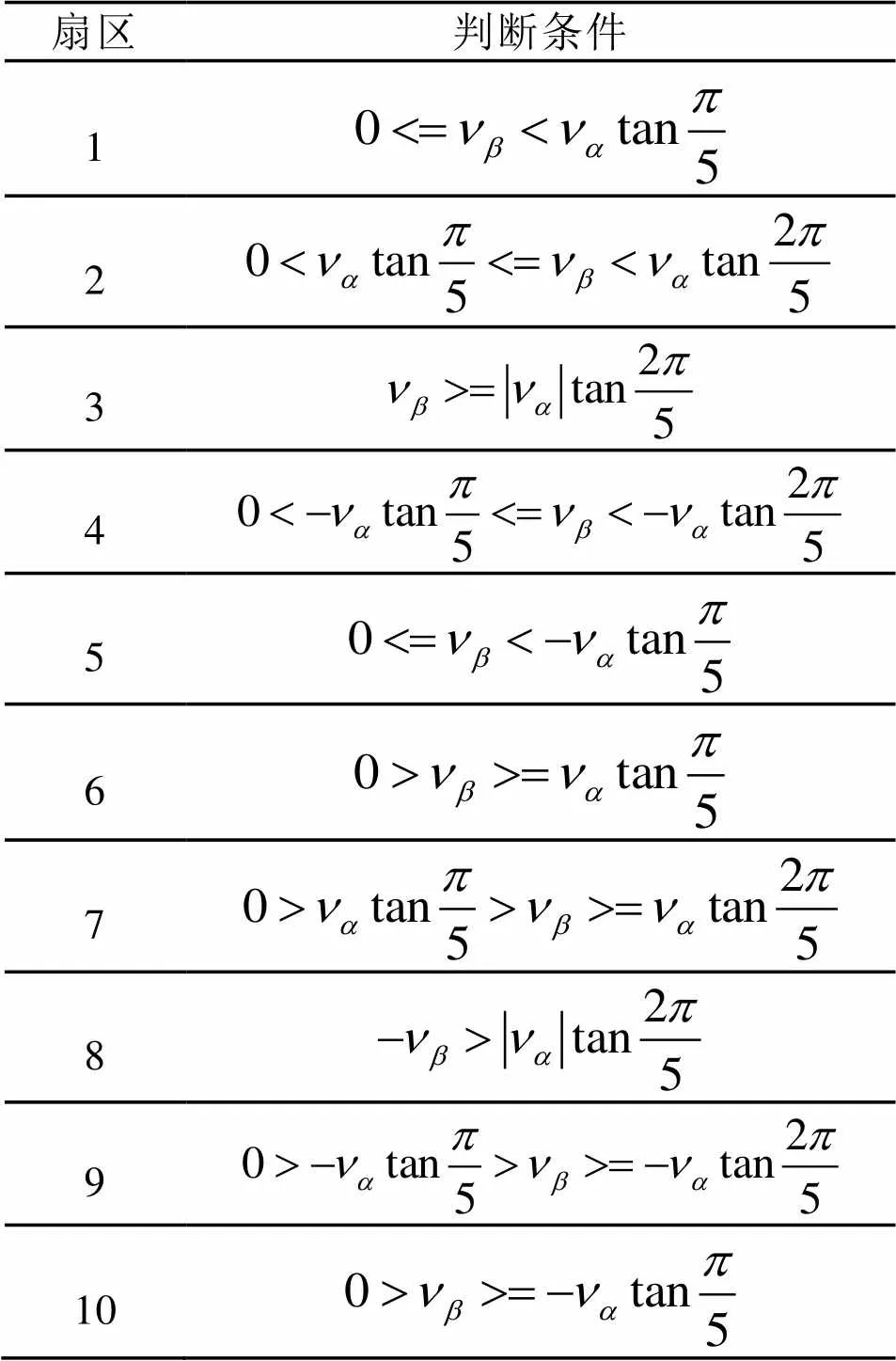
表1 扇区判断条件
如图3所示,当电压矢量落在扇区1时,其电压矢量可由不同开关电压矢量合成,将扇区1分为4个区间,根据电压矢量落在不同区间,合理选取特定矢量合成电压矢量。
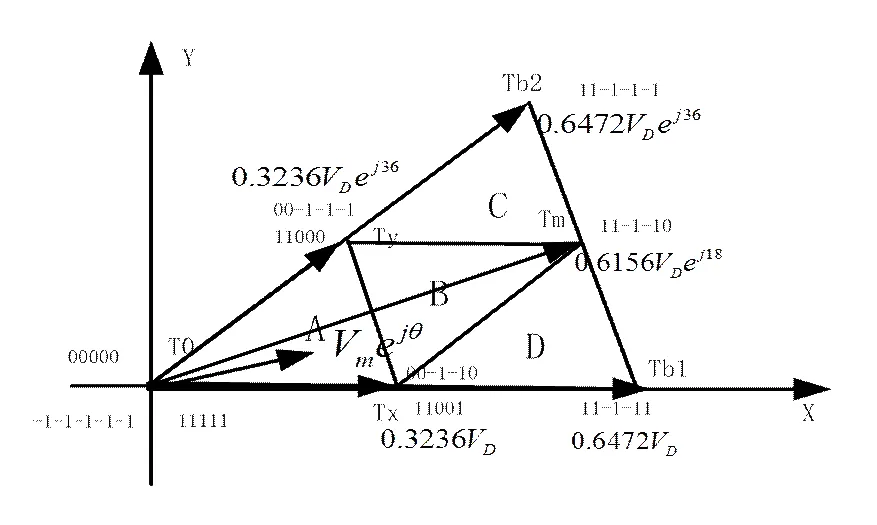
图3 扇区1各区间分布图
扇区1内各区间判断条件如表2所示,扇区1内各开关矢量作用时间如表3所示,表3中m为调制比、s为开关周期、为电压矢量旋转角度。
2 五相三电平全桥逆变其中点电位控制研究
特定矢量中的零矢量因五相电流和为零,对中点电位无影响;大矢量因无中点电位状态,对中点电位平衡无影响;中矢量不成对出现,无法通过调节中矢量来调节中点电位;小矢量对中点电位的影响如下:

表2 扇区1内各区间判断条件
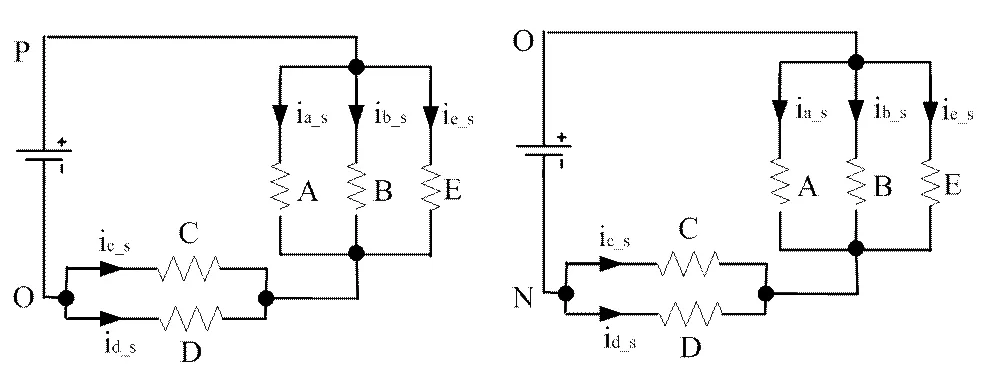
图4小矢量(11001、00-1-10)开关状态等效电路图
图4 所示,当开关状态为小矢量(11001)时,C、D相电流和为正,中点电位降低,C、D相电流和为负,中点电位升高;当开关状态为小矢量(00-1-10)时,C、D相电流和为正,中点电位升高,C、D相电流和为负,中点电位降低。
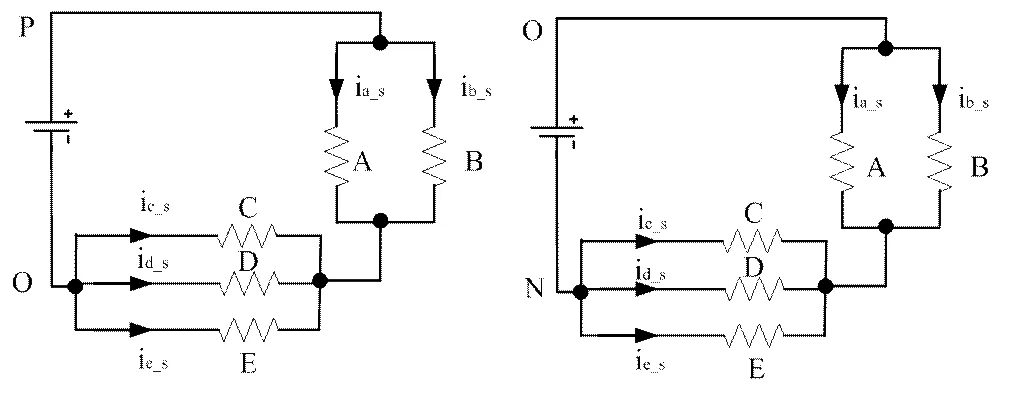
图5小矢量(11000、00-1-1-1)开关状态等效电路图
同理:如图5所示,当开关状态为小矢量(11000)时,A、B相电流和为正,中点电位升高,A、B相电流和为负,中点电位降低;当开关状态为小矢量(00-1-1-1)时,A、B相电流和为正,中点电位降低,A、B相电流和为负,中点电位升高。
综上所述,小矢量成对出现,它们对逆变器中点电位作用相反,通过调节两对小矢量作用时间可调节逆变器中点电位,达到控制五相三电平全桥逆变器中点电位平衡的目的。
3 电压矢量作用顺序选择
矢量选取方法有很多,遵循以下原则确定的电压矢量作用顺序如表4所示。
1) 避免输出电压产生大的d/d。
2) 减少开关损耗,每个控制周期中各相开关状态改变次数不超过2次。
3) 考虑各矢量对直流中点电位影响,电压矢量的选择尽可能使中点电压趋向平衡。
根据表4可推导出扇区1内五相三电平全桥逆变器各开关管驱动波形,其余扇区可依此类推,其中小矢量(11001)、(00-1-10)和(11000)、(00-1-1-1)作用时间关系通过平衡因子分配,平衡因子可通过直流母线电压PI环(增量式PI)调节输出。
4 仿真验证
为了验证所选算法有效,在MATALB中建模实现五相三电平全桥逆变器中点电位平衡调节算法仿真,仿真框图如图6所示,仿真系统由控制器、变频驱动系统、逻辑控制及指示灯组成。为了实现中点电位偏移,在直流侧(正母线与中点)外接2000 Ω电阻,仿真中设定开关频率1000 Hz、死区4 μs、最小脉宽14 μs、负载电阻3 Ω、负载电感14.7 H,变压器原副边线电压有效值6300 V1980 V,调制比0.9,输出电压频率20 Hz,控制策略选用VVVF控制,选用24脉波整流。
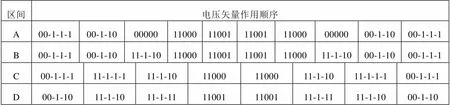
表4 扇区1不同区间电压矢量作用顺序表
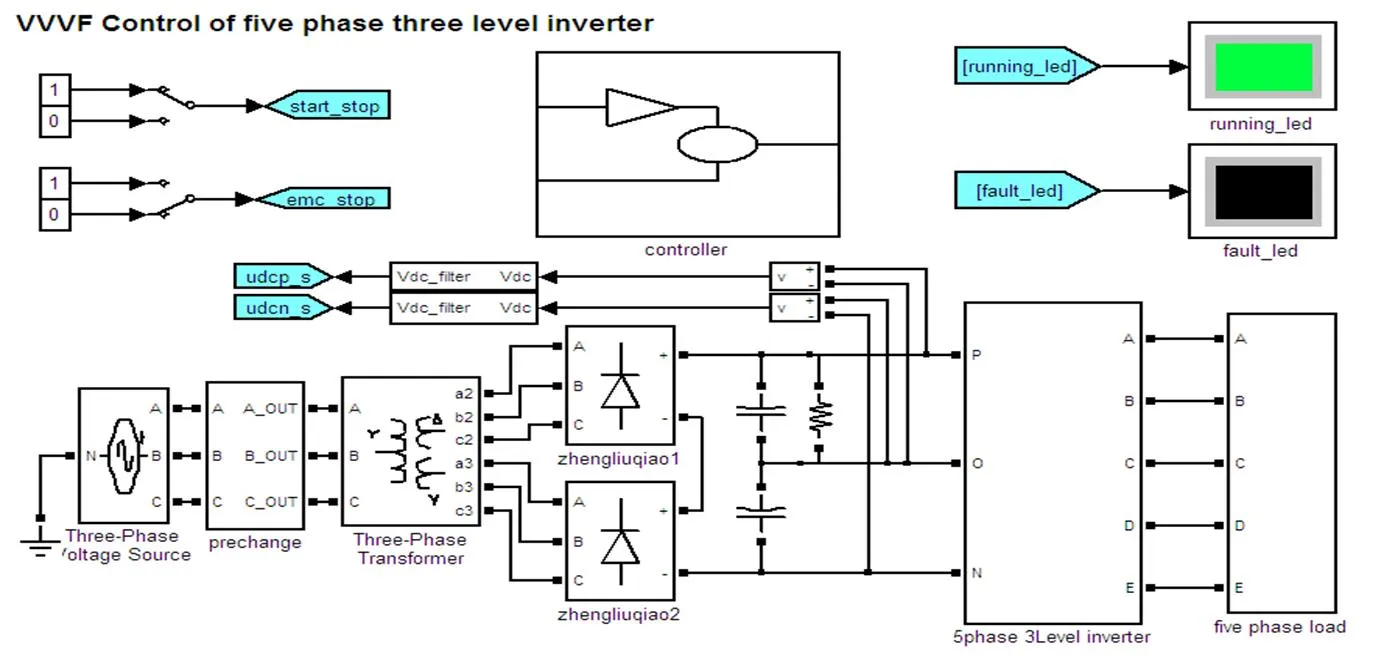
图6 五相三电平全桥逆变器中点电位平衡调节算法仿真框图
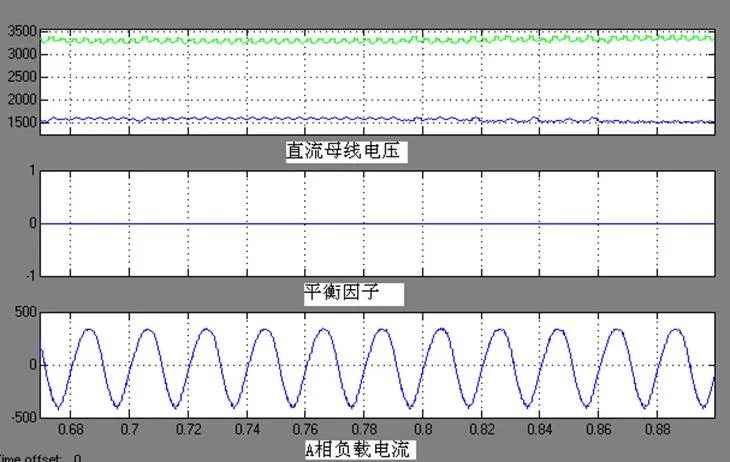
图7 五相三电平全桥逆变器中点电位平衡调节算法仿真波形(中点电位不控制)
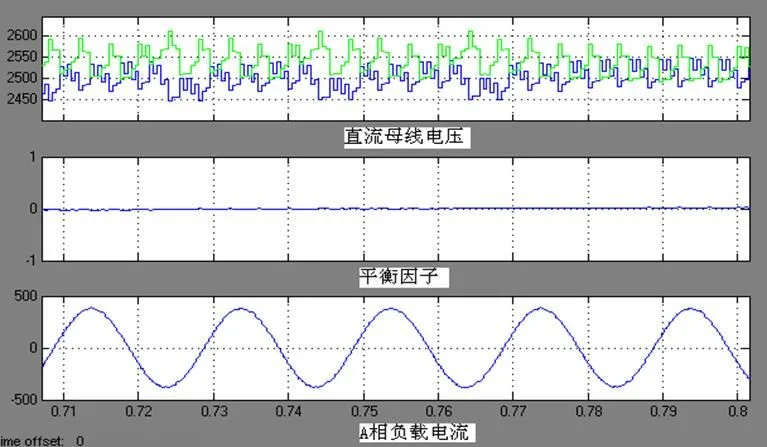
图8 五相三电平全桥逆变器中点电位平衡调节算法仿真波形(中点电位控制)
图7中正负直流母线电压偏差值恒定,超过1500 V,中点电位发生严重偏移,逆变器输出线电压波形出现畸变,负载电流波形出现畸变,降低了逆变器运行可靠性。
基于LabVIEW的变压器运输在线监测系统设计 吕 安,熊树生,徐宏飞,姜振军,罗 源,周彩玲6(79)
图8中正负直流母线电压基本一致,偏差不超过100 V,中点电位被很好控制,逆变器输出相电压含有五次谐波、线电压主要含基波成分,负载电流为正弦波,表明五相三电平全桥逆变器中点电位平衡调节算法有效。
5 实验验证
为了进一步验证算法有效性,在我所研制的五相三电平全桥逆变器上开展了试验验证,试验设备由可控整流电源、五相三电平全桥逆变器、五相阻感负载组成;试验中在正母线与支撑电容中性点两端跨接8 Ω电阻;设定器件最小脉宽14 μs,死区4 μs,直流母线电压额定值3600 V,可控整流电源输出直流电压66 V;控制芯片选用DSP2812,软件中数据定标为Q24,软件中平衡因子调节范围为0~2^24,0.5*2^24为平衡因子初始值。
所选算法成功应用于我所某大功率变频驱动系统上,系统组成如图9所示。试验中设定最小脉宽14 μs,死区4 μs,直流母线电压额定值3600 V,变频器输出额定频率20 Hz;10 MW变频驱动系统额定转速空载、满载稳定运行时,试验波形如图10所示。数据采集通道1为A1相输出相电压、通道3为A1相输出相电流、通道4为B1相输出相电流(实际电流为电流钳测量电流2倍)。
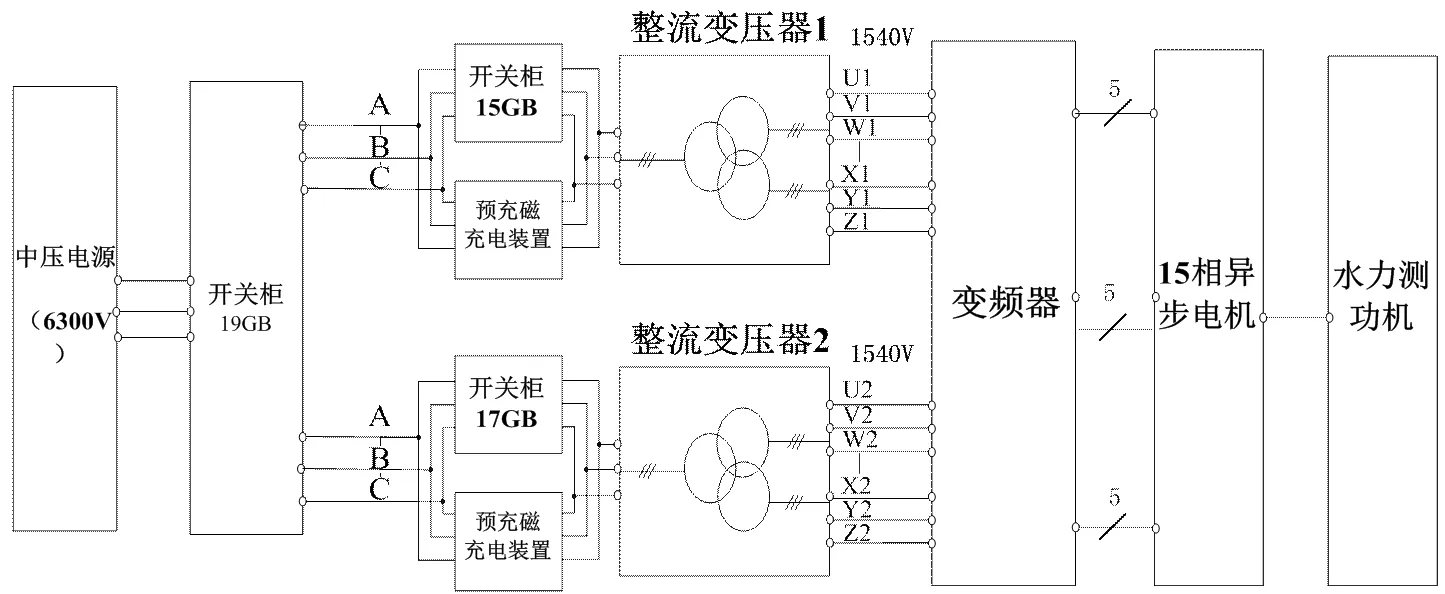
图9 变频驱动系统框图
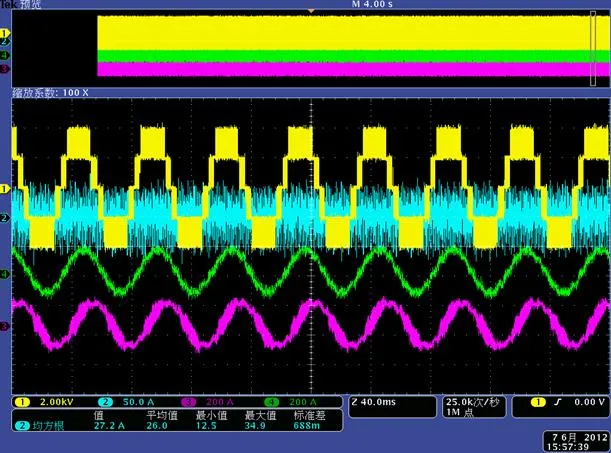
图10 变频驱动系统试验波形
图10为该变频驱动系统额定转速空载、带载稳定运行时电压、电流波形。运行中,变频器柜门上正、负母线电压表显示,空载时电压稳定在2000 V左右,满载时电压稳定在1800 V左右。上述试验表明,所选五相三电平全桥中点电位平衡调节算法有效,中点电位被很好的控制住。
本文首先推导了五相三电平全桥逆变器SVPWM调制策略,其次分析了不同方向的负载电流和电压矢量(大矢量、中矢量、小矢量、零矢量)对中点电位的影响,提出了利用冗余矢量、结合负载电流方向调节中点电位的控制算法,并给出了电压矢量的作用顺序,最后通过MATLAB仿真验证和试验验证了所选算法有效,研究成果具有很好的工程应用价值。
[1] 蔡凯, 程善美.三电平SVPWM方案实现.电气传动自动化, 2008, (3).
[2] 王小峰, 邓焰, 何湘宁.三相三电平二极管钳位型整流器的单载波调制和中点平衡控制策略研究.中国电机工程学报, 2006, (8).
[3] 宋庆国, 张晓峰, 于飞, 张成胜.五相三电平逆变器空间矢量PWM控制研究. 武汉理工大学学报, 2006, (10).
[4] 孙国亮, 连永涛.基于SVPWM五相三电平H桥逆变器中点电位控制研究.船电技术, 2012, (8).
[5] Oscar Alonso.Analysis of neutral-point voltage balancing problem in three-level netral- point– clamped inverters with SVPWM Modulation.0-7803 - 7474-6/02/2002 IEEE.
Netral-point Level Control Algorithm Research Base on Five-phase Three Level Bridge Inverter
Ruan Hui, He Yuming, Hu Chuanxi
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064)
TM464
A
1003-4862(2015)02-0001-05
2014-09-03
国家科技支撑计划项目(2012BAG03B01)资助
阮会(1982-),男,工程师(硕士)。研究方向:舰船电力推进系统。