基于MRAS无速度传感器的PMSM直接转矩控制
2015-10-14赵湘衡杨武王敏怀
赵湘衡,杨武,王敏怀
基于MRAS无速度传感器的PMSM直接转矩控制
赵湘衡1,杨武2,王敏怀1
(1. 湖南大学机械与运载工程学院,湖南长沙,410082;2. 中航工业南方公司,湖南株洲,412000)
对混合动力车用永磁同步电机最大转矩电流比的直接转矩控制系统进行分析。采用无功功率作为速度估算模型的模型参考自适应的方法,建立永磁同步电机最大转矩电流比无速度传感器直接转矩控制的系统模型。利用稳态的无功功率与瞬态的无功功率的差值作为误差信号,通过对误差信号设计合适的自适应律实时调节得到估算转速,根据超稳定性理论来保证整个系统的稳定性,并对该方案进行仿真验证。研究结果表明:在不同转速下,采用无功功率的无速度传感器模型估算的转速能有效地跟随实际速度,且整个系统具有良好的动、静态运行性能。
混合动力汽车;PMSM;模型参考自适应;直接转矩控制;无功功率
随着国家的能源战略被提出和实施,汽车产业在能源短缺和环境污染的双重压力下面临着严峻的挑战。为了实现汽车行业的可持续发展,发展具有节能作用的新能源汽车是实现汽车行业节能减排的重要途径之一。混合动力电动汽车技术是在当前技术条件下能够最接近产业化的新能源汽车技术[1]。在混合动力汽车的关键技术中,电机的驱动及其控制技术是其核心技术之一。混合动力汽车车用电动机主要分为永磁同步电动机、异步电动机和开关磁阻电动机。永磁同步电机(permanent magnet synchronous motor, PMSM)在控制方式上能够实现数字化,在结构上能够实现电机与齿轮箱的一体化,且具有体积小、功率密度高、转矩密度高、效率高、功率因数高、可靠性高和便于维护等优点,所以,在混合动力汽车的几种可供选择的驱动电机中,永磁同步电动机是主要发展方向之 一[1]。随着永磁同步电动机的发展,对其控制也提出了更高的要求。要实现对永磁同步电动机的精确控制,必须获得准确的转子转速。目前,大多采用光电编码器等机械传感器,这不仅增大了电机的体积和生产成本,而且不适应恶劣的工作环境,使电机易受干扰,无法满足永磁同步电机高性能控制系统的要求。为了克服传感器给调速系统所带来的不足,必须对永磁同步电动机无速度传感器进行研究[2]。目前,国内外学者已提出许多方法估计电机转子的位置和速度,在无速度传感器情况下,一般采用扩展卡尔曼滤波[3]、反电势估计[4]、高频注入法[5]、模型参考自适应[6]、神经网络[7]以及滑膜观测器[8]和模糊逻辑[9]对PMSM进行研究。本文作者主要研究以无功功率作为估算模型的模型参考自适应法(model reference adaptive system,MARS)在永磁同步电动机直接转矩控制系统中的应用。模型参考自适应法相比其他的方法具有控制相对简单、不需要额外的信号注入、稳定性良好的特点,故采用稳态的无功功率作为可调模型,将不含估计参数的方程瞬态无功功率作为参考模型,利用2个模型在同时工作时输出量的差值对转速自适应律进行推导,得到速度估计值。
1 永磁同步电机的数学模型
永磁同步电动机是在电励磁三相同步电动机的基础上发展而来的。它使用永磁体代替电励磁系统,从而省去了励磁线圈、集电环和电刷,而定子的结构、材料等与电励磁三相同步电动机的基本相同[10]。
在建立数学模型时,进行如下假设:1) 忽略定子和转子铁心磁阻,不计涡流和磁滞损耗;2) 永磁材料的电导率为0,永磁体内部的磁导率与空气的相同;3) 转子上没有阻尼绕组;4) 永磁体产生的励磁磁场和三相绕组产生的电枢反应磁场在气隙中均呈正弦分布;5) 稳态运行时,相绕组中感应电动势波形为正弦波。在此假设下,可得到PMSM 在转子同步旋转坐标系轴系下的数学模型为:
2 永磁同步电机最大转矩电流比的直接转矩控制
近年来,针对混合动力电动汽车的永磁同步电动机控制技术发展较快。对于混合动力车用永磁同步的电机,矢量控制和直接转矩控制为2种最常见的控制策略。
永磁同步电机的矢量控制系统能够通过坐标变换实现对轴和轴的定子电流进行解耦,可以将定子电流s的分量i和i作为单独的变量进行控制,因此,能够实现i为0 A甚至任意值时的控制。
永磁同步电机的直接转矩,通过控制输入的转矩和定子磁链控制,而不能直接控制i和i。但在实际控制中,在很多情况下要求能够实现某些特定的最优控制,如在恒转矩运行时进行的最大转矩电流比控制。而采用的定子磁链幅值恒定的控制准则不能满足要求,这时,定子磁链应该由满足这种控制要求的定子电流i和i来确定。对于隐极式永磁同步电机,不存在凸极效应,若使单位定子电流产生的转矩最大,则应控制i为0 A,需要得到对应的i为0 A时的定子磁链指令[11]。
而对于隐极式永磁同步电机,有L=L=L,故定子磁链表达可如下:
式中:s为定子电感。对于隐极式永磁同步电机,由式(7)可得电磁转矩方程可表示为
将式(9)代入式(8)可得到定子磁链的计算式为
所以,在直接转矩控制中,根据式(10)可以由转矩参考值来确定定子磁链参考值,以实现i为0 A时最大转矩电流比的直接转矩控制。
3 基于模型参考自适应的速度估算
3.1 波波夫超稳定理论
模型参考自适应辨识的主要思想就是将含有待估算参数的方程作为可调模型,将不含未知参数的方程作为参考模型,这2个模型的输出量具有相同的物理意义。工作时,利用这2个模型输出量差值,根据合适的自适应率来实时调节模型参数,以达到控制对象的输出跟踪参考模型的目的。通常根据波波夫超稳定定理[12]推导出自适应律,使系统保持稳定。
波波夫超稳定定理要求组成的系统满足2个条件:1) 在等价反馈系统中,线性环节位于正向通道,且严格正实;2) 非线性环节满足Popov积分不等式,表达式为

式中:()为线性环节的输出;(t)为非线性环节的输出。
3.2 基于模型参考自适应系统的速度估算
永磁同步电机的瞬态无功功率1可表示为[13]
将式(3)和式(4)代入(12)可得

而在隐极式永磁同步电机的最大转矩电流比直接转矩控制控制中,i为0 A,式(14)可表示为
定义变量误差为

图1 MRAS系统框图
根据自适应律的一般结构,估算速度的表达式为
式中:为线性定常环节的输出,=();()为线性环节正向通道中设置的1个线性补偿器,可以通过调整()保证线性环节中传递函数的严格正实性。
根据超稳定理论,将模型参考自适应模型变换为2个环节组成的等价反馈系统。式(16)右边部分作为线性环节输入,而没有外部信号输入,则非线性环节的输出−,

对Popov积分不等式进行逆向求解,可以得到估算转速的自适应规律为
由式(21)的自适应律可以得出估算转速,替代了使用速度传感器得到的转速。
整个最大转矩电流比的无速度传感器的直接转矩控制系统方框图见图2,其中定子磁链计算式见式(10)。

图2 整个控制系统结构
4 仿真结果及分析
为验证该方案的有效性,在simulink中搭建基于模型参考自适应无速度传感器的永磁同步电机控制系统模型并进行仿真。电机参数设置如下:定子电阻S=2.875 Ω;直、交轴等效电感L=L=8.5 mH;转子磁链f=0.175 Wb;转动惯量=0.008 kg·m2;黏滞系数=0 Pa∙s;极对数0=2。设置仿真时间为0.6 s。
为了验证系统的动静态性能,设置初始给定参考转速=1 000 r/min,并在0.3 s时突变到1 500 r/min,速度、磁链和电流仿真结果如图3~6所示。

1—实际转速;2—参考转速

1—实际转速;2—估算转速
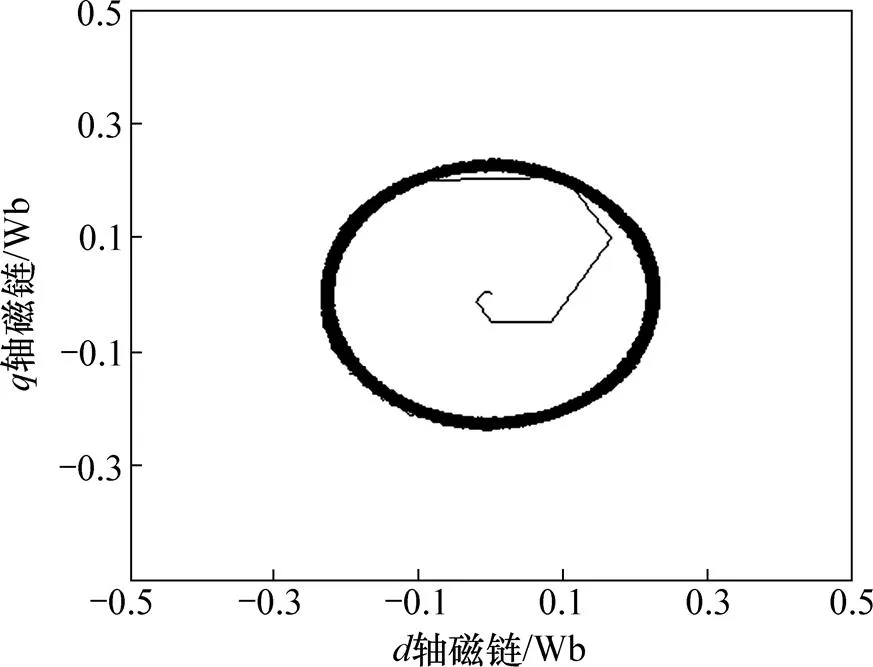
图5 n由1 000 r/min突变到1 500 r/min时磁链观测值

图6 n由1 000 r/min突变到1 500 r/min时的d轴电流
从图3可以看到:在启动阶段有波动,但很快趋于稳定,在0.05 s达到给定的转速;当转速突变为1 500 r/min时,实际转速有小幅度波动,但很快重新跟随了给定的转速,波动较小。从图4可见:在给定参考转速平稳时,估算的转速能很快到达实际速度;在0.1 s时,估算速度达到实际速度;当转速突变到1 500 r/min时,估计转速也能很好地跟踪实际速度,在0.4 s时达到实际转速。从图5可见:定子磁链的观测图形近似圆形,容差在滞环控制器的容许范围内,较好地逼近真实值, 准确度高。从图6可以看出:在启动时电流有波动,很快达到稳定值,且稳定时波动不大;在速度突变时,电流在0.05 s内达到稳定值。从以上仿真结果可以看出,整个系统具有良好的动静态性能。
为了验证方案在低速状态下的有效性,在低速状态下进行仿真。设置初始给定参考速度1 000 r/min进行仿真,速度、磁链和电流的仿真结果如图7~10所示。
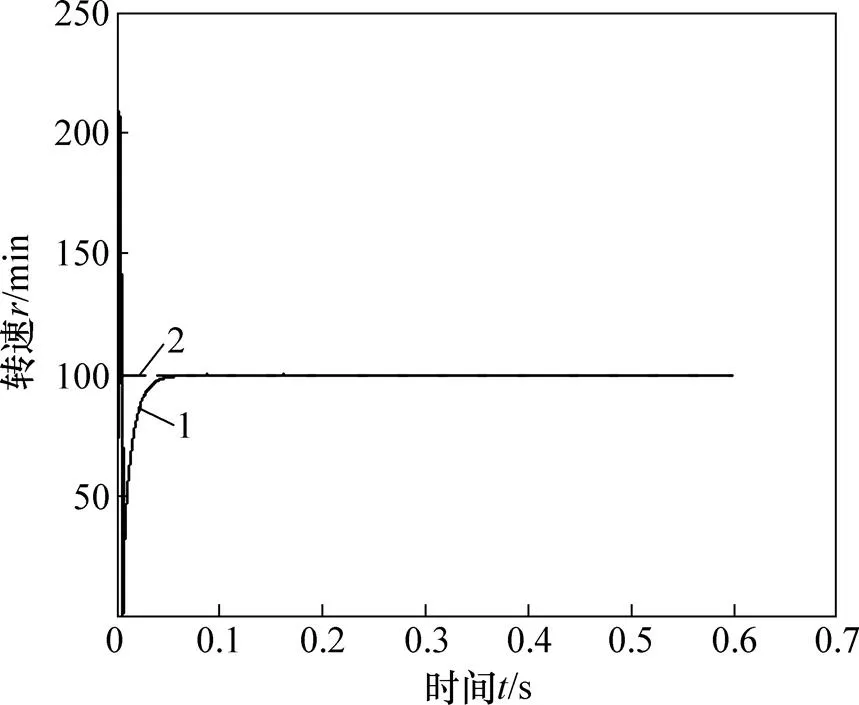
1—实际转速;2—参考转速

1—实际转速;2—估算转速
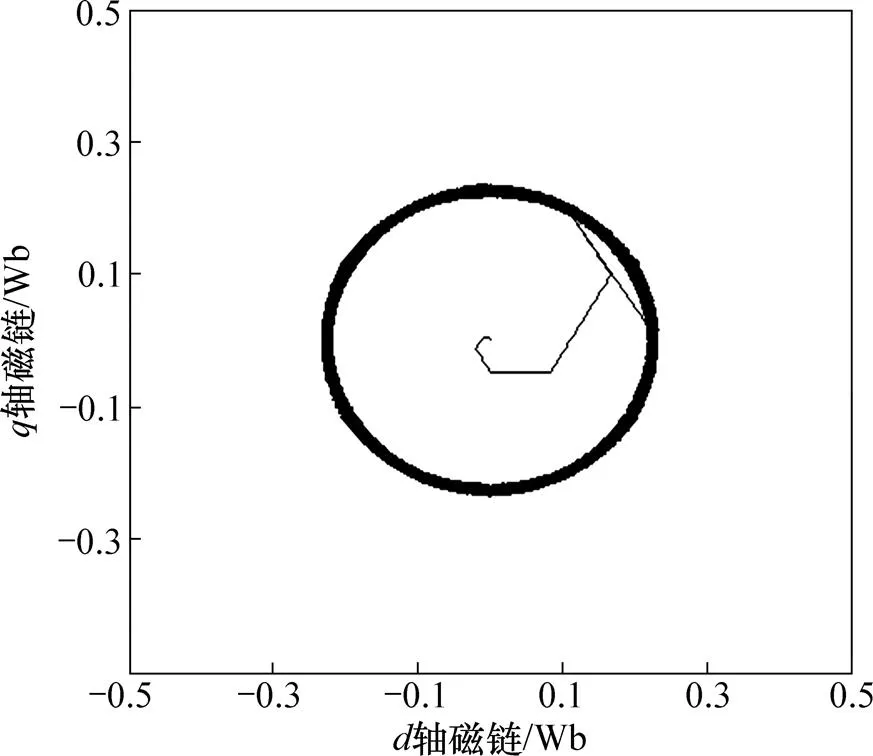
图9 n=100 r/min时的磁链观测值

图10 n=100r/min时的d轴电流
从图7可见:启动时,实际转速超调值较大,有波动,但在0.05 s时实际转速很好地跟随给定的参考速度。从图8可以看出:估算转速在0.2 s时能稳定的跟随实际速度。从图9可见:在低速时,定子磁链地观测值也近似于圆形的观测值,容差在滞环控制器的容许范围内,能较好地逼近真实值, 准确度较高。从图10可见:在低速时,定子轴电流在启动时有较大波动,且达到稳定时有偏差,但在0.25 s时达到稳定值且波动不大。
从以上2组仿真结果可以看出:在不同转速下,速度估算值都能很好地满足无速度传感器直接转矩控制系统的速度反馈要求,且系统具有良好的动态响应性和稳定性,估算转速始终能很好地跟踪电机实际 转速。
5 结论
1) 对混合动力电机的控制策略进行分析,建立了最大转矩电流比的无速度传感器的直接转矩控制模型。利用瞬时无功功率作为参考模型和稳态无功功率作为可调模型来估算永磁同步电机的速度,估算速度能很好地响应并跟随实际速度。
2) 利用无功功率建立的模型参考了自适应估算模型,不需要估算反电动势,因而消除了积分所产生的相关问题。低速时系统具有良好的动态性能。
3) 利用无功功率建立的模型参考了自适应估算模型,不依赖于定子电阻、磁场强度和轴电感,只依赖于轴电感,与其他方法相比,简化了参考模型和可调模型的表达式,运算量小,整个系统具有很好的动静态性能。这对于混合动力汽车电机控制算法的实现具有一定的参考意义。
[1] 宗世勇. 混合动力汽车永磁同步电机矢量控制的研究[D].长沙: 湖南大学电气与信息工程学院, 2010: 1−2. ZONG Shiyong. The study of hybrid electric vehicle permanent magnet synchronous motor vector control[D]. Changsha: Hunan University of Electrical and Information Engineering, 2010: 1−2.
[2] 敬华兵, 廖力清. 基于模型参考自适应方法的无速度传感器永磁同步电机控制[J]. 机车电传动, 2007(1): 33−36. JING Huabing, LIAO Liqing. Control of speed sensorless permanent magnet synchronous motor based on MARS[J]. Electric Drive for Locomotives, 2007(1): 33−36.
[3] 李高林. 基于扩展卡尔曼滤波的永磁同步电机的无位置传感器控制[D]. 长沙: 湖南大学电气与信息工程学院, 2011: 10−15, 27−41. LI Gaolin. Research on sensorless control of PMSM based on EKF theory[D]. Changsha:Hunan University of Electrical and Information Engineering, 2011: 10−15, 27−41.
[4] 王艳. 基于反电动势法的无速度传感器矢量控制系统[D]. 青岛: 青岛大学自动化工程学院, 2010: 27−29. WANG Yan. Speed sensorless vector control system base on the back electro motive force[D]. Qingdao: Qingdao University. Collage of Automation Engineering, 2011: 27−29.
[5] Ren J, Feng H, Ren H, et al. Simulation of PMSM vector control system based on propeller load characteristic[C]//Intelligent Control and Information Processing, 2010 International Conference on IEEE, 2010: 735−737.
[6] Maiti S, Chakraborty C, Hori Y, et al. Model reference adaptive controller-based rotor resistance and speed estimation techniques for vector controlled induction motor drive utilizing reactive power[J]. IEEE Trans Ind Electron, 2008, 55(2): 594−601.
[7] 王旭阳. 基于神经网络MRAS速度辨识的研究与改进[D]. 大连: 大连交通大学自动化工程学院, 2012: 5−6. WANG Xuyang. Research and improvement on speed identification based on neural network MRAS[D]. Dalian: Dalian Jiaotong University. School of Automation Engineering, 2012: 5−6.
[8] 王正, 王一平. 基于滑模观测器的 PMSM 无速度传感器研究[J]. 微电机, 2012, 45(5): 51−54. WANG Zheng, WANG Yiping. Speed sensorless research of permanent magnet synchronous motor based on sliding mode observer[J]. Micromotors, 2012, 45(5): 51−54.
[9] 黄庆, 黄守道, 匡江传, 等. 基于模糊自抗扰的PMSM无速度传感器控制[J]. 湖南大学学报(自然科学版), 2012, 39(7): 37−43. HUANG Qing, HUANG Shoudao, KUANG Jiangchuan, et al. PMSM Sensorless Control Based on Fuzzy Active-disturbance Rejection[J]. Journal of Hunan University (Natural Sciences), 2012, 39(7): 37−43.
[10] 王成元, 夏加宽, 等. 现代电机现控制技术[M]. 北京: 机械工业出版社, 2008: 170−172. WANG Chenyuan, XIA Jiakuan. Modern control technique of electrical machines[M]. Beijing: China Machine Press, 2008: 170−172.
[11] 李珍国.交流电机控制基础[M]. 北京: 化学工业出版社, 2010: 199−202. LI Zhenguo. Foundation of AC motor control[M]. Beijing: Chemical Industry Press, 2010: 199−202.
[12] 李永东. 交流电机数字控制系统[M]. 北京: 机械工业出版社, 2002: 78−86.LI Yongdong. Digital control system of AC motor[M]. Beijing: China Machine Press, 2002: 78−86.
[13] Maiti S, Chakraborty C, Sengupta S. Simulation studies on model reference adaptive controller based speed estimation technique for the vector controlled permanent magnet synchronous motordrive[J]. Simulation Modelling Practice and Theory, 2009, 17: 585−596.
Direct torque control of speed sensorless permanent magnet synchronous motor based on MARS
ZHAO Xiangheng1, YANG Wu2, WANG Minhuai1
(1. School of Mechanical and Vehicle Engineering, Hunan University, Changsha 410082, China;2. China National South Aviation Industry Co. Ltd.,Zhuzhou 412000, China)
The direct torque control system of the maximum ratio of torque to current for PMSM (permanent magnet synchronous motor) was analyzed, which was used in hybrid electric vehicle. The system model of sensorless control for PMSM of the maximum ratio of torque to current was established based on the model of reference adaptive system using the reactive power as a speed estimation model. The error of the instantaneous and steady-state reactive power was utilized to design appropriate adaptive law, and the adaptive law was adjusted to estimate the speed. The system stability was ensured by Popov super-stability theory, and simulation was carried out at different speeds. The results show that the proposed method can effectively estimate the actual speed andthe system has good dynamic and statistic performance.
hybrid electric vehicle; PMSM (permanent magnet synchronous motor); MRAS (model reference adaptive system); direct torque control; reactive power
10.11817/j.issn.1672-7207.2015.10.011
TP273
A
1672−7207(2015)10−3631−06
2014−09−20;
2014−11−27
湖南省新型工业化专项(2012GK4009)(Project (2012GK4009) supported by the New Industrialization of Hunan Province)
赵湘衡,助理工程师,从事混合动力电动汽车电机控制研究;E-mail:zhaoxiangheng@163.com
(编辑 陈灿华)