基于智能控制的农业节水灌溉系统的研究
2015-10-10高国丽
高国丽
(吉林农业科技学院电气与信息工程学院,吉林 吉林 132002)
基于智能控制的农业节水灌溉系统的研究
高国丽
(吉林农业科技学院电气与信息工程学院,吉林吉林132002)
农业节水灌溉技术系统自动化水平关系到高效农业的发展。传统的控制方法并不理想,以模糊神经控制为基础,通过组态软件采集的作物蒸腾量和土壤水势为被控对象进行智能控制的智能控制节水灌溉系统,可得到较为准确的灌溉用水量,仿真结果证明智能控制发放的有效性。
农业自动化;模糊神经控制;节水灌溉
1 农业节水灌溉系统
灌水量既影响农产品的产量,也影响农产品的质量。高效节水灌溉自动控制技术主要是向适量所需灌溉的方向。本设计主要包括两个方面:一是测量作物的蒸腾量,根据作物需水特性来决定灌溉量的多少,摆脱经验做法,使作物灌溉决策建立在科学的基础之上。二是控制土壤条件、土壤水分信息及作物需水特性进行合理的灌溉决策,传统的方法为人工控制阀门改为定量控制水量,模糊神经PID根据蒸腾量和土壤水势来控制水泵以达到控制灌溉用水量,达到合理灌溉,实现了智能控制的目标。对作物生长的土壤湿度进行自动监控的系统,它能对作物进行适时、适量的灌水,起到高效灌溉,节水、节能的作用。
2 模糊控制系统
模糊控制是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种计算机控制系统,是一种从行为上模仿人的模糊推理和决策过程智能控制方法。将操作人员或专家的经验归结为模糊控制规则,然后把传感器信号模糊化,并用此模糊输入去适配控制规则,完成模糊逻辑推理,最后将模糊输出量进行清晰化处理,变为模拟量或数字量后送给执行器去控制被控对象。模糊控制由三个步骤组成,即模糊化、模糊推理、清晰化,其结构如图1所示。模糊控制器设计的内容包括:①模糊控制器的结构选择与参数化;②模糊规则的选取;③知识库的建立;④确定模糊化和解模糊的方法;⑤模糊推理算子的选择;⑥控制性能的调整与完善。
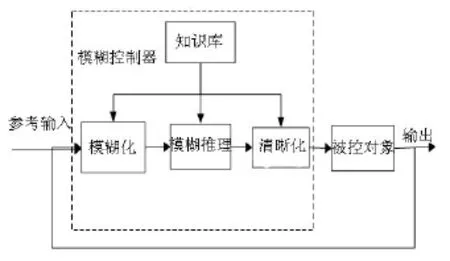
图1 模糊控制原理图
3 BP神经网络
BP网络学习算法的基本思路是把输出层出现的与“期望”不符的误差,归因于连接权值和采用的阈值的不适当。通过把输出层节点的误差逐层向输入层反向传播以分摊给各连接节点,从而可算出各连接节点的参考误差,并据此对各连接权值和阈值进行相应的调整,使网络达到相应的映射要求。具体的学习算法如下:
计算输出层节点输出yi与期望输出值的误差,令:

向隐含层节点反向分配误差,令:

调整隐含层与输出层节点连接权值Vri及输出层节点阈值δi:
Vri=Vri+αbrdi(3)
δi=δi+αdr0<α<1(4)
式中,α为调整步长。
4 模糊BP神经PID控制系统
模糊控制输入量的偏差e和偏差的变化率ec,通过模糊化的处理,得到各自的模糊语言变量E和EC。作为神经网络的输入,模糊规则和模糊语言推理都由神经网络完成。神经网络输出水泵电机的模糊语言值,通过去模化后,实现通过水泵电机控制灌溉水量,其结构框如图2所示。
模糊神经网络PID控制算法的计算步骤可归纳如下:
(1)事先选定BP网络的结构输入层节点数和隐含层节点数,并给出各层加权初值,选定学习速率和惯性系数。
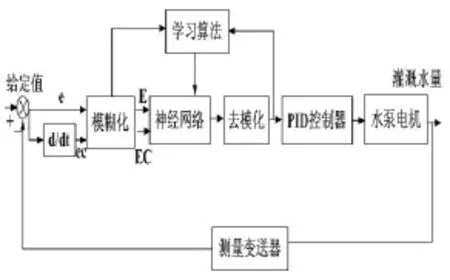
图2 模糊BP神经网络PID控制原理图
(2)对温度误差、误差的变化率进行归档模糊化处理,作为BP网络的输入。
(3)计算BP网络的各层神经元的输入和输出,控制PID控制器的参数,控制蔬菜大棚的水泵电机的灌溉量。
(4)PID控制采用的是经典增量式数字,控制式为:

(5)计算修正输出层、正隐含层的连接权值。
5 仿真实验
本文以某合作单位的灌溉区域为例,进行灌溉区域为600m2,分为6个灌溉区,每区至少设置一台土壤水分传感器,进行仿真实验,采用变步长ode45算法,仿真起始时间为0.0,结束时间为400.0,在200.0时加入20%流量扰动信号,给定初始信号为阶跃信号,仿真结果如图3所示,图中上方曲线为经典PID控制方法,下方为模糊BP神经PID控制方法。从中我们可以看出,智能控制方案优于传统PID控制方案,具有较好的控制品质,对扰动的调节能力较强,对象输出值经过一定的调节,能够达到预期的结果。
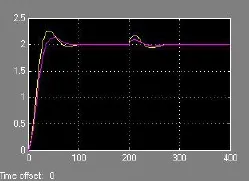
图3 仿真研究结果对比
6 结语
精准灌溉作为精细农业其中的一环重要环节,其控制目标是使土壤的含水率稳定在所设灌溉阈值附近,土壤含水率在灌溉前后保持稳定,通过仿真实验,对传统控制方法和智能控制方法进行了对比,实验结果证明了后者的有效性,对深化农作物灌溉策略都具有重要意义,为精准农业研究工作提供了很好的工具。
[1]高来宝.农田水利灌溉问题及节水措施分析[J].陕西水利,2014,(S1):180-181.
[2]郑怀文,俞国胜,刘静.节水灌溉技术研究现状[J].林业机械与木工设备,2006,34(10):7-10.
[3]吴普特,范兴科,牛文全.渠灌类型区农业高效用水模式与工程示范[J].农业工程学报,2003,(11):36-40.
[4]王晓玲,刘丽艳.节水灌溉工程管理模式的实践与探讨[J].节水灌溉,2003,(6):20-21.
[5]田景文,高美娟著.人工神经网络算法研究及应用[M].北京:北京理工大学出版社,2006.
[6]张曾科.模糊数学在自动化技术中的应用[M].北京:清华大学出版社,1997.
Research on Agricultural Water Saving Irrigation System Based on Intelligent Control
GAO Guo-li
(Jilin Agricultural Science and Technology College,Electrical and Information Engineering College,Jilin,Jilin 132002,China)
Thesystemautomationlevelofagriculturalwater-savingirrigationtechnologyrelatestothedevelopmentofefficient agriculture.The traditional control method is not ideal,in the article,based on the fuzzy neural control method,intelligent watersaving irrigation system which uses crop transpiration and soil water potential acquired by configuration software as controlled objectisapplied.
agricultural automation;fuzzy neural control;water saving irrigation
TP273
A
2095-980X(2015)11-0003-02
2015-10-15
吉林农业科技学院青年基金项目,编号:吉农院合字[2014]第218号。
高国丽(1981-),女,讲师,主要从事农业自动化的研究工作。
