基于射影定理分层控制的次同步阻尼控制器设计
2015-09-21李兴源李保宏
李 宽,李兴源,李保宏,陈 实
(四川大学 电气信息学院,四川 成都 610065)
0 引言
高压直流输电HVDC(High Voltage Direct Current)作为一种大电网互联的有效手段,在国内外都得到了广泛发展[1]。HVDC可以解决大容量、高压电、远距离输电问题,有效减小了电能损耗。但直流输电整流站定电流控制的等间隔脉冲触发方式有可能对邻近大型火电机组引入负阻尼,进而有可能引起发电机轴系的次同步振荡SSO(SubSynchronous Oscillation)现象,从而对发电机组以及电网的稳定运行造成影响[2-3]。
SSO的发生有可能造成发电机组轴系断裂、电网失稳等情况,因此对次同步阻尼控制器的研究有重要意义。抑制SSO的手段有很多种,可通过附加励磁系统阻尼控制SEDC(Supplementary Excitation Damping Controller)[4-5]、FACTS 装置[6-9]等方法抑制,此外,随着计算机计算能力的不断提高,也可以通过一些智能算法设计阻尼控制器抑制SSO,并取得了不错的控制效果[10-11]。当直流引起SSO时,附加次同步阻尼控制器SSDC(Supplementary SubSynchronous Damping Controller)[12-13]作为一种经济有效的方法而被广泛应用。文献[14]提出利用Prony辨识得到系统的传递函数,然后进行设计SSDC,但Prony存在定阶困难的缺点,得到的系统传递函数阶数较高,不利于实际工程实现。文献[15]提出利用系统传递函数Bode图设计SSDC,但未给出详细的控制结构。文献[16]提出基于TLS-ESPRIT辨识出SSO的振荡频率和阻尼信息,然后基于辨识结果得到振荡模态的相位补偿量,设计出SEDC。国内外大部分文献主要是集中在基于数学算法、SSO发生机理进行相位补偿等方法设计SSDC,从系统状态方程角度设计SSDC的研究较少。
根据发电机轴系刚体系数、轴系扭转系数及轴系惯性时间常数等参数,可直接得到发电机轴系的固有扭振频率(fc)[2]。 本文从系统状态方程角度出发,提出基于射影定理[17]进行降阶处理来设计SSDC。首先利用TLS-ESPRIT算法[16]得到每个fc下的系统线性模型,然后通过射影定理保留闭环系统主导振荡模态,将状态反馈转换为输出反馈,最后得到每个fc降阶处理后的控制器传递函数,从而实现每个振荡模态分层控制。
本文以某电网直流系统作为实例仿真模型,先通过TLS-ESPRIT算法求得每个fc下的系统传递函数,然后基于射影定理分别针对每个fc求得SSDC的传递函数,最后将设计的SSDC加入到直流整流侧的定电流控制器上。以PSCAD/EMTDC作为实例仿真软件,仿真结果表明,设计的控制器可有效抑制直流输电引起的SSO。
1 基本原理
1.1 射影控制
射影控制是保留参考系统主导特征根的条件下,将状态反馈控制器映射为低阶静态或动态的输出反馈控制器。当设计的射影控制器的阶数多时,更多的参考系统特征根将被保留下来,更能反映参考系统的实际信息,这使得射影控制器的设计更为灵活,但控制器阶数过高不利于实际工程实现。
在SSDC的设计过程中,由于发电机组轴系的固有扭振频率可以通过计算得到,故而基于射影控制设计的控制器直接保留固有模态下的特征根即可,即针对振荡模态的阻尼比为负或较小的特征根设计控制器。
被控系统的状态方程可用式(1)表示:

其中,x为状态向量;y为输出向量;u为控制向量;A为状态矩阵;B为控制矩阵;C为输出矩阵。
系统状态反馈可表示为:

其中,K为状态反馈增益矩阵。加入状态反馈后可得闭环系统:

将式(3)表示的系统进行特征根分解得到:

其中,Λ为特征根三角阵;X为特征向量构成的矩阵。
令基于射影定理得到的SSDC的状态方程为:

其中,z 为 SSDC 的状态向量;Au、Bu和 Cu分别为SSDC的状态矩阵、控制矩阵和输出矩阵。
联立式(1)和(5)得:

式(6)可表示为被控系统式(1)基于射影控制式(5)得到的闭环反馈系统。式(6)可简化为:

对A′进行特征根分解得:

其中,W′为引入的特征向量;Λ′为式(4)求得的主导特征根保留值;X′为所保留主导特征根所对应的特征向量。即存在:

式(8)中,由于引入状态反馈形成闭环系统导致系统阶数增加。
由式(8)知:

由式(10)可推得:

定义 P=W′-1Bu,则有:

鉴于Λ′为式(4)求得的主导特征根保留值,则由式(8)联立式(9)亦可推得:

即可求得:

由式(12)、(13)、(15)知,只要求得状态反馈增益矩阵K,即可求得SSDC的状态矩阵、控制矩阵和输出矩阵,进而得到SSDC的传递函数。
由于W′表示引入的特征向量,可能为任何矩阵,故而可直接取W′为单位矩阵。但考虑引入的特征向量后,系统的输出向量y除了包含参考系统的变量,还包含加入反馈后增加的变量。由文献[17]知,矩阵P为一个可调的自由参数对称矩阵,因而可以通过矩阵P的选择降低引入特征向量对原系统的影响。
1.2 直接代入法求状态反馈增益
由于SSDC的设计是针对每个轴系固有扭振频率分别设计相应的控制器实现分层控制,故而每个控制器只针对1对或2对保留共轭特征根,因此可以用直接代入法[18]求得状态反馈增益矩阵K。
假设控制器阶数为4阶,可将状态反馈增益矩阵K写为:

假设闭环系统式(3)所期望的特征根的位置分别为 s=μ1、s=μ2、s=μ3、s=μ4,将 K 代入闭环系统式(3)可得:

由式(17)知该方程两端均为s的多项式,故而可通过其两端的s同次幂系数相当来确定k1、k2、k3和k4,进而可求得状态反馈增益矩阵K。
1.3 控制器设计
首先取得待研究发电机端转速,经过4阶巴特沃斯滤波器得到相应的固有扭振频率,然后基于射影控制设计SSDC的传递函数G(s),最终将针对每个振荡模态所设计的SSDC输出叠加后,加入到直流整流侧的主控制器上,控制框图如图1所示。其中,k为附加控制器增益;Δω为发电机转速偏差;I和Iord分别为直流电流的测量值和整定值;α为整流侧触发角。

图1 SSDC结构图Fig.1 Structure of SSDC
2 仿真算例
在PSCAD/EMTDC仿真软件中搭建某电网直流输电系统的拓扑结构图,此直流输电系统额定电流为3 kA,双极运行额定传输功率为3000 MW。当此系统在孤岛情况下降压70%运行时,系统发生扰动会引发整流侧发电机组的SSO。拓扑图如图2所示,其中发电厂A机组轴系参数如下:高压缸(HP)、中压缸(IP)、低压缸(LP)、发电机(GEN)的惯性常数分别为0.2125、1.5965、1.7125、0.731;HP-IP、IP-LP、LP-GEN的弹性系数分别为12544、16500、22161,转矩力矩分别为 0.53 p.u.、0.235 p.u.、0.235 p.u.。
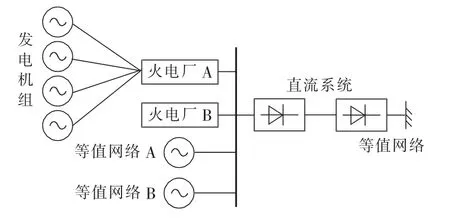
图2 孤岛系统Fig.2 Islanded system
经计算得知该发电机系统存在13.38Hz、24.44 Hz和29.97 Hz3个振荡模态。在直流整流侧主控制器上施加幅值为10%的阶跃,再分别通过TLS-ESPRIT算法辨识出这3个振荡模态频率作为控制器输入时,所对应的系统传递函数为:
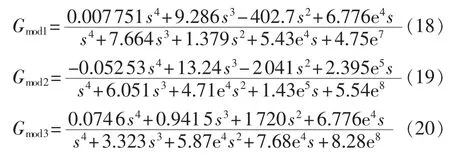
根据辨识出的每个扭振模态下的系统传递函数,选择期望特征值后,利用直接代入法求得相应的状态反馈增益矩阵:
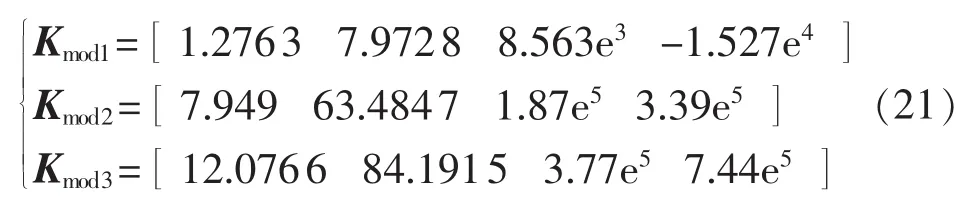
根据式(21)得到的状态反馈增益矩阵,基于射影控制原理求出每层控制器传递函数为:

最后将所求的每层SSDC叠加后加入到整流侧的主控制器上。
2.1 未加SSDC
在2s时在整流侧换流母线上施加三相接地短路故障,故障持续时间为0.02 s。系统未加入SSDC的发电机转速时域仿真结果如图3所示。
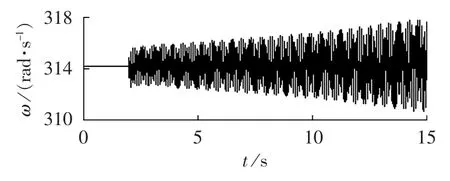
图3 未加SSDC的发电机转速Fig.3 Speed of generator without SSDC
由图3知,在系统发生扰动后,发电机转速发生振荡且为放大趋势,系统会发生次同步放大现象。发电机轴系各缸体间的转矩(标幺值)如图4所示。
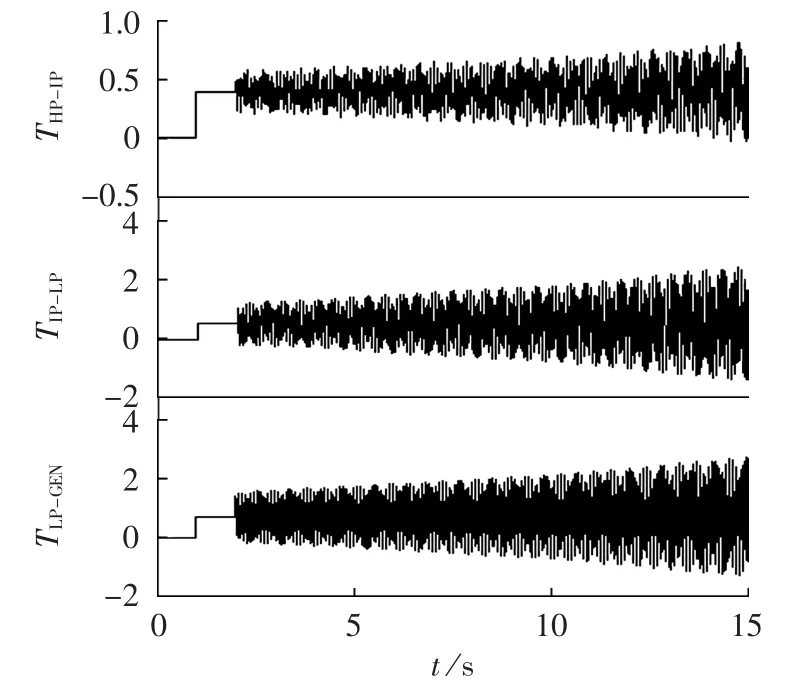
图4 未加SSDC的扭振转矩图Fig.4 Torsional vibration torques of generator without SSDC
由图4知,发电机的4个模块间有3个扭振模态,每个扭振模态都是呈发散状态。采用TLS-ESPRIT算法同样可以辨识出每个振荡模态的详细参数,辨识结果如表1所示。
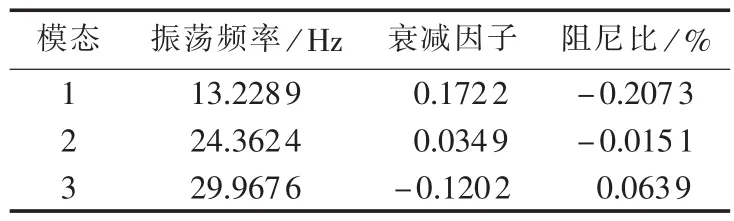
表1 未加SSDC的TLS-ESPRIT辨识结果Table 1 Mode parameters identified by TLS-ESPRIT without SSDC
由表1知,直流系统存在3个振荡模态,模态1和模态2为负阻尼,容易造成SSO发散,模态3为弱阻尼,当发电机组转速发生波动时,这个频率的模态衰减较为缓慢,不利于系统稳定。
2.2 加SSDC
根据式(22)—(24)基于射影控制设计的SSDC传递函数,加入到直流整流侧主控制器,发电机转速的时域仿真结果如图5所示。
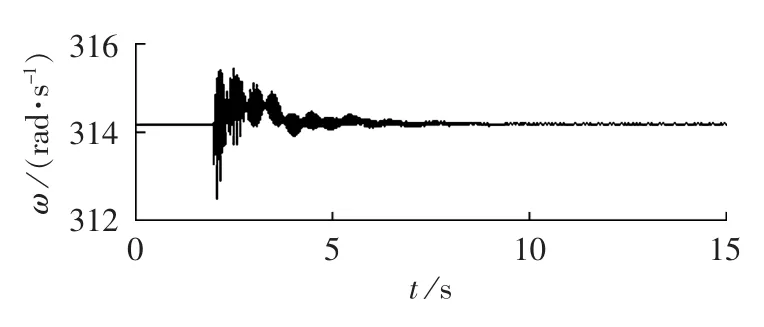
图5 加入SSDC的发电机转速Fig.5 Speed of generator with SSDC
由图5知,加入SSDC以后,发电机转速波动很快平稳,说明设计的SSDC有效。发电机轴系各缸体间的转矩(标幺值)如图6所示。

图6 加入SSDC的扭振转矩图Fig.6 Torsional vibration torques of generator with SSDC
由图6知,在加入SSDC以后,发电机各模块之间的扭振转矩可实现快速平稳。由图4和图6的对比分析,充分说明所设计SSDC的有效性,且控制器阶数较低,利于实际工程实现。
采用TLS-ESPRIT算法同样可以辨识出每个振荡模态的详细参数,辨识结果如表2所示。

表2 加入SSDC的TLS-ESPRIT辨识结果Table 2 Mode parameters identified by TLS-ESPRIT with SSDC
将表2与表1对比分析知,加入SSDC以后,各个模态的阻尼比均有大幅度的提高。
3 结论
提出利用射影定理可将原系统的主导特征根保留并映射到低阶反馈控制器上的特点,设计SSDC。首先利用TLS-ESPRIT算法得到每个固有扭振模态下的系统传递函数,然后选择保留特征根基于射影控制设计出每个扭振模态的控制器传递函数,从而实现各模态的分层控制。
根据某电网直流系统的实例仿真模型,得到3个振荡模态所对应的控制器传递函数,经计算知所设计的控制器阶数较低,有利于实际工程实现。且仿真结果表明,加入SSDC后,发电机轴系的振荡可快速平稳,系统阻尼比有很大提高,表明所设计控制器的有效性。