MMC控制系统时序逻辑与子模块故障监测
2015-09-19赵成勇张宝顺倪晓军翟晓萌郭春义
罗 程,赵成勇,张宝顺,倪晓军,翟晓萌,郭春义
(华北电力大学 新能源电力系统国家重点实验室,北京 102206)
0 引言
模块化多电平换流器MMC(Modular Multilevel Converter)是2001年由德国慕尼黑联邦国防军大学的Rainer Marquardt提出,它区别于以往由多个开关器件直接串联构成的两电平、三电平电压源换流器VSC(Voltage Source Converter)结构,采用子模块(SM)级联的方式,这种方式可有效降低IGBT器件的损耗和交流侧谐波含量,这种模块化结构也使得系统更易于扩展[1-4]。
自MMC结构提出以来,国内外对其进行了大量的理论研究,包括其建模、调制策略、电容均压、环流等[5-12],取得了很大进展。针对MMC物理系统及控制器,文献[13]介绍了基于南澳柔性直流输电示范工程的背靠背大功率柔性直流输电样机,分析了采用注入增强栅晶体管(IEGT)的优势。文献[14]建立了基于MOSFET的49电平MMC样机,采用光纤隔离测控复用电路有效地降低了光纤通道数,并且保证了全控器件触发的可靠性,但文中没有对如何可靠监测子模块的各类故障进行说明。文献[15]给出了一种柔性直流输电阀基控制器VBC(Valve Base Controller)的设计思路,并指出传统直流输电中的阀基控制设备与柔性直流输电中VBC的区别,但是针对MMC这种多级控制器系统,没有给出VBC与上层站级控制器以及底层子模块控制器SMC(Sub-Module Controller)之间协同工作的方法。文献[16]介绍了Trans Bay Cable工程的建模过程,但并未对其物理系统及控制器结构进行介绍。
本文提出一种控制器同步方法:顶层控制器通过背板总线同时向6个桥臂上的VBC发送方波同步信号,VBC在检测到方波信号的上升沿后同时开始一个新的控制周期,继而向各自桥臂上的所有SMC发送光纤同步信号,再结合合理的时序逻辑关系,通过这种自上而上、分级同步的方法实现了系统3级控制器的配合。针对子模块过电压以及欠电压故障的监测,采用硬件模拟电路检测是否出现过电压或欠电压,再通过软件短时延时算法来判断故障是否持续,实现了子模块过电压以及欠电压故障的可靠监测,防止了故障保护系统由于硬件模拟电路的误差出现误动。
1 MMC及其物理模拟系统
1.1 MMC基本拓扑
三相MMC拓扑结构及其内部子模块结构如图1所示,其每个桥臂由N个子模块级联构成,上下桥臂合起来组成一个相单元,每个桥臂上有一个电抗器L;O为等效中性点;图1的虚线框中为子模块结构,iSM和uSM分别为子模块的电流和电压,C0为子模块内部电容。
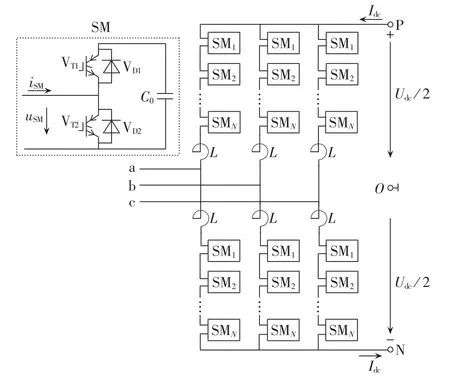
图1 三相模块化多电平换流器拓扑结构Fig.1 Topology of three-phase MMC
子模块运行状态可以根据其内部2个IGBT器件的通断状态分为投入、切除和闭锁3种:
a.VT1导通、VT2关断,子模块对外呈现其内部电容电压,此时为投入状态;
b.VT1关断、VT2导通,子模块对外呈现零电压,此时为切除状态;
c.VT1与VT2均闭锁,这种工作状态为闭锁状态,其为非正常工作状态,用于MMC启动时向子模块电容进行预充电,或者在发生系统故障时保护换流器。
1.2 MMC物理模拟系统
MMC物理模拟系统接线如图2所示。为了降低对实验室电源的要求,系统采用互拖式的运行结构,2列均为21电平MMC系统,换流器每桥臂串联22个子模块,其中2个子模块为热备用;2列MMC系统之间通过直流电缆连接,直流线路上装有开关;电源侧设置有调压器,可用来测试系统在不同电压下的运行工况;在系统的交流侧和直流侧预留了多个外部接口,可用来进行故障设置以及多端柔性直流输电系统的扩展。
通过多个开关间的配合,本系统可开展多种实验。
a.断开 QS2,闭合 QF1、QS1、QSa1、QFa1、KMa8、KMa9、KMb8、KMb9、QFb1、QSb1,通过操作 KMb2/3/4可进行MMC高压直流输电MMC-HVDC(Modular Multilevel Converter High Voltage Direct Current)给无源负载供电的实验。
b.闭合 KMa8、KMa9、KMb8、KMb9以及 QS2,系统处于双端运行状态,此时可进行两端MMC环网运行实验,用以研究MMC特性。处于这种运行状态下时,有功功率只会在两端换流站和直流线路之间环形流动,不经过实验室电源,实验室电源提供的有功量只包含两端换流站的有功损耗。
c.闭合KMa2/3/4中任意单个或多个开关,可以研究MMC在交流系统出现电压不平衡或者短路时的运行工况。
d.闭合KM1、KM2中的1个或2个,可以分别研究MMC-HVDC单极直流短路故障以及双极直流短路故障。
2 控制系统及其时序逻辑
2.1 控制系统架构
本文采用分级控制结构,将系统的控制划分为3级,即站级控制器、VBC、SMC。其中站级控制器根据上位机所给参考量和实时采样数据产生调制比及移相角,形成正弦电压参考波,并完成与上位机的通信;VBC根据站级控制器产生的参考波,并结合环流抑制策略及均压排序策略来产生各个子模块所需的触发脉冲;SMC根据VBC所产生的触发脉冲实现对全控器件的可靠触发。
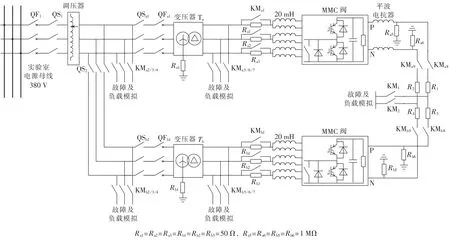
图2 MMC物理模拟系统Fig.2 Physical simulation system of MMC
站级控制器的功能由数字信号处理器(DSP)与现场可编程门阵列(FPGA)协同实现。其中DSP负责主控芯片FPGA与上位机之间的数据通信以及系统控制保护的功能,主控芯片FPGA负责正弦电压参考波的生成。FPGA和DSP之间通过16位的地址总线和16位的数据总线进行通信,DSP与上位机之间通过以太网总线进行通信。VBC的功能由FPGA实现,负责产生各个子模块所需的触发脉冲,并完成VBC与站级控制器的数据通信。SMC的功能由复杂可编程逻辑器件(CPLD)实现,负责全控器件的可靠触发、子模块信息的采集以及与VBC的数据通信。控制系统整体架构如图3所示。

图3 控制系统架构Fig.3 Architecture of control system
2.2 控制系统时序逻辑
MMC物理系统需要多级控制器协同工作,由于各个控制模块功能不同,所选芯片也不尽相同,其晶振或电路参数之间的差异会引起控制系统的误差。VBC与SMC采用不同的芯片,它们分别工作在各自的时钟下,互不影响。基于此,本文提出以下控制系统时序逻辑:
a.站级控制器向6个VBC同时发送10 kHz的方波信号作为同步信号,使整个系统工作在以站级控制器为统一基准的固定周期下,即1个控制周期为 100 μs;
b.当VBC检测到同步信号的上升沿时,开始1个控制周期,VBC计时模块清0,并开始计时;
c.当 VBC计时模块计时至 1 μs时,VBC向SMC发送同步数据帧,当SMC收到同步帧时,SMC计时模块清0,并开始计时;
e.当VBC计时至70 μs时,其向SMC发送8位数据帧,其中包含IGBT触发以及子模块是否旁路等信息,至此,VBC 1个周期内的控制任务已全部完成,等待下一次同步信号;
f.当SMC计时模块计时至77.5 μs时,进行死区设置,死区设置时间为10 μs;
g.当SMC计时至87.5 μs时,将IGBT触发信息发送至驱动模块,至此,子模块1个周期内的控制任务已全部完成;
h.SMC等待下一次同步信号。
VBC与SMC同步时序图如图4所示。

图4 VBC与SMC时序逻辑Fig.4 Sequential logic between SMC and VBC
3 子模块故障监测及上报
子模块是MMC最基本的工作单元,MMC通过控制子模块的有序导通和关断实现交流电能到直流电能的变换,子模块的工作状态信息包括子模块电容电压、子模块故障、子模块旁路信息。其中子模块的故障可以分为2类:SMC光纤通信故障,包括接收数据超时、接收数据帧格式错误、奇偶校验错误;子模块内部故障,包括子模块电容过电压、欠电压、子模块温度超限和IGBT过流故障。本文重点研究子模块内部故障检测及上报原理。
3.1 子模块故障监测
3.1.1 子模块过电压欠电压故障监测
《五经臆说》现存十三条,而根据王阳明自己在《序》中所说,远不止此数,他自称“凡四十六卷,经各十,而礼之说尚多缺,仅六卷云”〔9〕918,从现存各条来看,其主体部分,虽然有不少是对于文义的解释,但牵强臆断的为数不少,正应证了“臆说”的题旨,这从一个侧面反映出王阳明解释古文献的重要方式是依凭胸臆一味牵强附会。
传统的过电压检测方法是通过硬件电路产生基准电压,然后将实时检测的电压与基准电压进行比较,如果超过基准电压,即判定为过电压,欠电压的检测方法类似。这种方法虽然操作简单,但是由于过电压、欠电压监测电路处于强电强磁场的环境中,易受到外部的干扰,干扰信号达到一定强度,叠加至原信号后,若超过过电压、欠电压设定阈值,就可能会引起比较电路判断错误,从而导致保护系统的误动,不利于系统稳定运行。本文通过硬件模拟电路检测、软件算法控制相结合的方法实现子模块电容过电压、欠电压的可靠监测。在子模块控制板上设置模拟电路检测子模块电容是否过电压或者欠电压,为了防止硬件模拟检测电路的误差所带来的过电压、欠电压误动,在软件上设置了延时上报故障机制,即检测到过电压或者欠电压达到一定时间后,再向上层控制器上报故障,以下为具体的过电压、欠电压故障检测机制。
图5为子模块过电压故障监测框图,当子模块电容电压大于设置的过电压基准电压时,通过模拟比较电路,端口OV输出高电平,此时将端口输出信息送至SMC,但SMC不立即上报故障,而是对SMC控制芯片开始计时,设定延时时长为20 μs。若由于干扰信号造成比较电路判断错误,选择20 μs的延时可以躲过各种干扰信号造成的电压毛刺,从而保护系统不会误动;若实际存在过电压欠电压故障,则须在子模块承受故障的最大允许时间内切除故障。综合考虑以上2点,为了保证保护系统的可靠性以及速动性,选择20μs作为软件延时时长。如果在20μs之后故障依然存在,则向上层控制器上报故障。
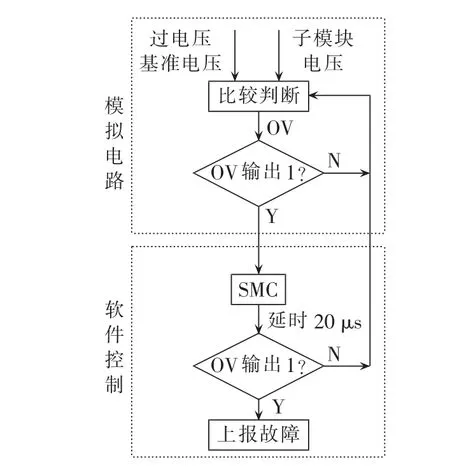
图5 子模块过电压故障监测Fig.5 Detection of sub-module overvoltage
图6 是子模块欠电压故障监测框图。当子模块电容电压小于设置的欠电压基准电压时,通过模拟比较电路,端口UV输出高电平,此时将端口输出信息送至SMC,同样地,SMC也不立即上报故障,对SMC计时,如果在20 μs之后故障依然存在,则向上层控制器上报故障。
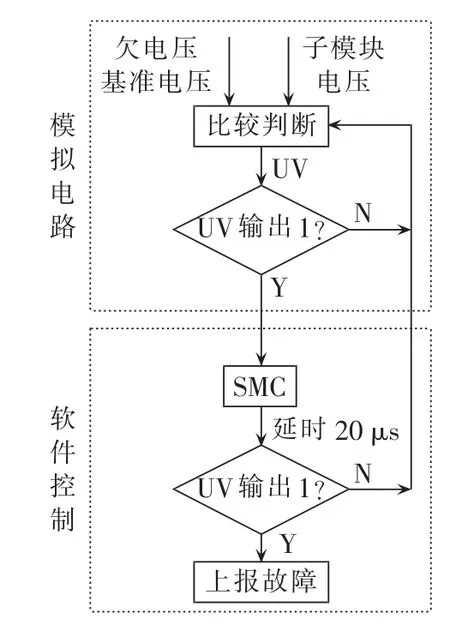
图6 子模块欠电压故障监测Fig.6 Detection of sub-module undervoltage
采用这样的监测方法有效降低了系统保护误动的概率,提高了运行的可靠性。
3.1.2 子模块过温故障及IGBT过流故障监测
子模块的过温故障监测主要是指子模块内IGBT器件的过温监测,在正常运行过程中,IGBT由于不断的投切,会产生大量的热量,若热量不能及时排出,导致IGBT温度过高,会对IGBT的正常工作造成严重影响。子模块过温监测是通过温控电路实现,当温度大于80℃时,温控开关闭合,通过变换电路变为高电平向控制芯片上报故障。
子模块中IGBT的驱动模块采用CONCEPT公司的集成驱动2SD315A,该驱动模块具有相应的过流故障监测能力,当IGBT发生过流故障时,驱动模块能够快速闭锁IGBT,并向控制芯片上报故障信息。
3.2 子模块信息的上报
子模块需要及时向VBC传送大量信息,若将这些信息分别通过光纤向上层传送,需要耗费大量的光纤,并且会大幅增加二次系统的投资成本以及复杂性。采用给各个子模块加装控制器的控制结构,子模块有足够的能力去处理电压采集、故障检测、信息上报等工作。另外,上文中提到的子模块过压以及欠压的检测方法,也需SMC在算法上的配合。
SMC通过数字编码光纤通信向VBC上报信息,为了保障高效可靠地完成通信,开发了如下的通信协议。
SMC与VBC的通信采用异步串行通信方式,数据发送时总是以起始位开始,以停止位结束,另外还包含数据位和校验位。
在空闲时,发送信号线为逻辑高电平1,通信开始时,首先发送起始位,起始位为逻辑低电平0;起始位之后为数据位,SMC向VBC发送24位的数据位;之后为奇偶校验位,采用偶校验方式;停止位为1位逻辑高电平,表示1帧通信完成。
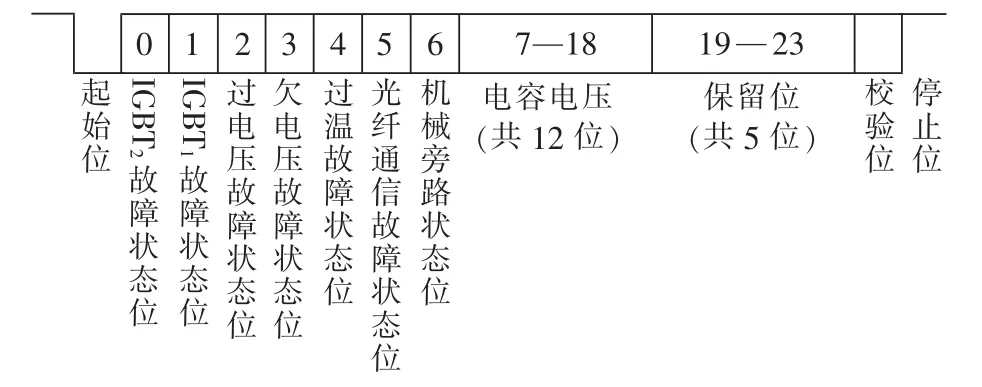
图7 SMC发送的通信帧的格式Fig.7 Format of communication frame sent by SMC
通信帧格式如图7所示。通信协议规定SMC向VBC发送的数据位为24位,依次为IGBT2故障状态位、IGBT1故障状态位、过电压故障状态位、欠电压故障状态位、过温故障状态位、光纤通信故障状态位、机械旁路状态位、12位子模块电容电压值以及5位数据保留位,其中,子模块电容电压通过AD转换芯片直接得到,用12位的数字量来表示。
4 实验结果
4.1 物理模拟系统参数
物理模拟系统控制部分按照以上所述的控制架构进行设计,一次部分交流侧、直流侧以及子模块参数如下。
a.交流侧参数:额定电压为380 V;额定有功功率为100 kW;变压器变比为380 V/2000 V;限流电阻为50 Ω;桥臂电抗为20 mH。
b.直流侧参数:电平数为21;额定电压为4 kV;额定电流为25A;平波电抗为15mH;线路阻抗为2Ω。
4.2 双端稳态运行实验结果
启动时,应先对MMC系统的2列分别进行充电,待充电完毕后,切除充电电阻,再分别对两端进行解锁操作使之运行于正常工况下,此时实验室电源为两侧系统提供电压支持、无功功率及有功功率损耗。运行稳定以后,将直流线路上的开关闭合,并将其中一端切换至定有功功率模式,实现了功率的环网流动。
上位机设定直流电压参考值为3 kV、输送功率参考值为30 kW,录波设备监测到的波形如图8—11所示。图8为定直流电压端阀侧C相交流电流波形,其测量有效值为12.2 A,由于模拟量的采集未进行滤波处理,电流波形谐波含量较大。图9为定直流电压端测得的直流电压波形,其值稳定在3 kV,可看出定直流电压控制能够很好地稳定直流电压。图10为直流线路传输有功功率波形,其值稳定在30 kW左右,定有功功率控制效果良好。图11为定有功功率端C相下桥臂子模块电压波形,可以看出22个子模块电容电压均处于150 V左右,均压效果良好。
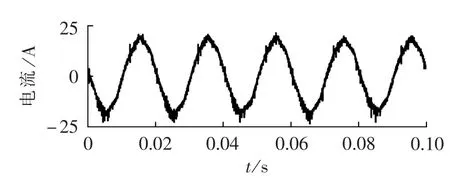
图8 阀侧C相交流电流Fig.8 AC current of phase C at valve side

图9 直流电压Fig.9 DC voltage
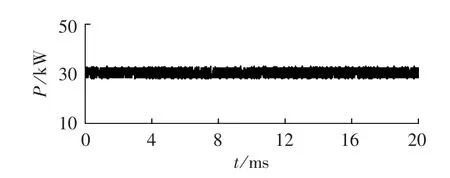
图10 有功功率Fig.10 Active power
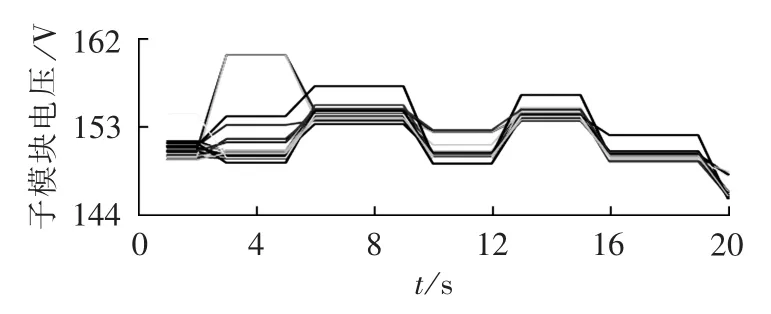
图11 子模块电压Fig.11 Voltage of sub-modules
由上述实验结果知,MMC物理模拟系统可以有效地控制直流电压、输送功率并且进行子模块电压的均衡,说明了本文所提时序逻辑的可行性。
5 结论
本文分别针对MMC物理模拟系统各级控制器间的时序逻辑以及子模块的过电压欠电压故障监测进行了研究。对物理模拟系统进行了稳态实验,验证了所提时序逻辑的可行性。该物理模拟系统在多级控制器协同控制方面采用自上而下、分级同步的时序控制逻辑,有效地避免了不同控制单元由于自身晶振的差异所引起的控制系统误差。另外,该物理模拟系统具有检测子模块故障,并能将子模块各类故障上报的特点,其中对子模块过电压欠电压故障的检测,采用了硬件模拟电路检测结合软件控制的方法,减小了系统保护误动的概率,提高了运行的稳定性。
