级联DSTATCOM补偿不平衡负载分相控制策略
2015-09-19陈国柱
王 跃,杨 昆,陈国柱
(浙江大学 电气工程学院,浙江 杭州 310027)
0 引言
配电网中越来越多的电力机车、轧钢机以及电弧炉等大容量不平衡负荷投入运行,由此引起的电压不平衡、波动及闪变等电能质量问题会给配电网和电力用户造成各种危害。对此,国内外学者进行了广泛深入的研究,其中配电网静止同步补偿器(DSTATCOM)以其快速的动态响应能力、更宽的运行范围和良好的谐波性能等优势,在不平衡负荷补偿中受到了越来越广泛的关注和应用[1-4]。此外,由H桥功率模块级联构成的级联DSTATCOM可实现高压大容量化,并且各模块直流侧彼此独立,容易实现均压,同时各功率单元结构相同,便于模块化的设计、安装及维护,非常适合在中高压配电网中应用。
三角形结构的级联STATCOM的三相输出电流可独立控制,因此在补偿不平衡负载时受到了更多的关注与研究,但其每相换流链承受电网线电压,因此其级联H桥的数目是相同电压等级星形结构的倍,成本增加。星形结构的级联STATCOM受限于三相输出电流之和为零的约束条件,其研究多限于补偿平衡负载的工况[5-6]。通过引入D/Y型隔离变压器,星形级联STATCOM具有补偿不平衡负载的能力[7-8],但是变压器的引入使其工程应用价值受限。此外,有文献采用基于零序电压叠加的控制方法,取得了较好的补偿不平衡负载的效果,但是零序电压计算方法较复杂,且容易引起系统失稳。
三相四线制级联DSTATCOM由于可以直接接入电网,省去了复杂的多重化变压器或隔离变压器,同时具有分相不对称补偿能力,因而得到了越来越多的研究[9]。有文献提出分序控制策略[10],需在正序、负序及零序坐标系下分别建模并设计控制器参数,过程繁琐且无法实现选择性补偿。还有一些文献采用基于导纳补偿的分相控制策略[11],但指令电流检测计算复杂,动态性能差,补偿能力有限。
对于三相四线制不对称负载的补偿,在电流跟踪环节无法通过旋转坐标得到直流分量,故需对交流信号直接跟踪,传统比例积分(PI)控制器对无功、谐波等周期性信号直接跟踪时存在静差。基于内模原理的重复控制器因对周期性信号跟踪精度高而在并网逆变器中广泛应用[12-15]。但重复控制以工频周期为步长对误差信号进行修正,动态响应时间长,且需存储一个周期内的误差信息,占用的存储空间大。
本文针对以上分析的不足,基于三相四线制级联DSTATCOM可等效为3个独立系统的特点,提出静止坐标系下的DSTATCOM瞬时电流分相控制策略,在正、负序同步旋转坐标系下分别提取基波正序、负序无功分量,可按照系统容量灵活选择补偿模式。为提高无功补偿精度,引入快速重复控制,设计了基于PI控制内环和快速重复控制外环的电流双环控制策略,其中快速重复控制器以工频半周期为步长对误差信号进行调节,动态响应时间更快,所需存储空间减少一半。最后搭建三相四线制DSTATCOM仿真模型和实验样机进行验证。
1 三相四线制不平衡负载无功指令提取
DSTATCOM对配电网不平衡负载补偿的目标是:当补偿容量足够时完全补偿大容量冲击性不对称负载产生的负序、零序分量和正序无功分量,保证电网电流对称,且只含基波正序有功分量,提高配电网侧的功率因数;当补偿容量不足时优先补偿不对称负载的负序、零序分量,尽量保证电网电流对称[16-17]。
1.1 正、负序同步旋转变换及滑动平均滤波
对于三相四线制不平衡无功负载,根据对称分量法,负载电流可分解为正序、负序和零序分量:

其中,ωt为 a 相电网电压的相位角;下标“P”、“N”和“0”分别表示基波正序分量、负序分量和零序分量;ψP、ψN和 ψ0分别为正、负、零序初始相位角。
上式中各分量均为交流分量,为提取出指令电流,使用式(2)矩阵对其进行同步旋转变换:

经正序同步旋转变换(θ=ωt),可得:

经负序同步旋转变换(θ=-ωt),可得:

其中,下标“+”、“-”分别表示正、负序同步坐标系,“d”、“q”分别表示对应同步坐标系下 d、q 轴分量。
由式(3)、(4)可以看出,在正序同步坐标系下,负载电流基波正序分量变换为d、q轴上的直流量,基波负序分量变换为2倍工频(100 Hz)的交流分量,零序分量为0。而在负序同步坐标系下,负载电流基波正序分量变换为2倍工频的交流分量,基波负序分量则变换为直流分量,零序分量仍为0。
为了提取出直流分量,在此引入滑动平均滤波器(MAF)[18]。MAF 的时域数学模型为:

其中,x(t)、xave(t)分别为 MAF 的输入信号、输出信号;Tw为MAF的滑窗长度。进行离散域的分析时,假设MAF的滑窗中包含输入信号的N个采样点信息,即Tw=NTs(Ts为采样周期),则 MAF的离散域描述如式(6)所示,其中 x(k)为当前采样点信息。

将式(6)所示差分方程转换到z域中,可得MAF的传递函数为:

该设计中,MAF用于滤除2倍工频分量,可将Tw定为工频周期的1/2。此时MAF的幅值、频率特性曲线及其阶跃、谐波瞬态响应曲线分别如图1、2所示。作为对照,给出了截止频率为30 Hz的传统二阶低通滤波器(LPF)的对应曲线。

图1 滑动平均滤波的幅值、频率特性曲线Fig.1 Magnitude and phase characteristic curves of MAF

图2 滑动平均滤波的阶跃、谐波瞬态响应曲线Fig.2 Transient response of MAF to step change and harmonic
由图1可知,MAF具有完全低通特性,对直流分量既无幅值衰减,也不会引入相位滞后,而对2倍工频分量的衰减幅度则比二阶低通滤波器大,滤波效果更好。此外,由图2可见,MAF的阶跃、谐波响应速度均快于二阶低通滤波器,且稳态跟踪误差更小。
1.2 不平衡无功指令选择性提取
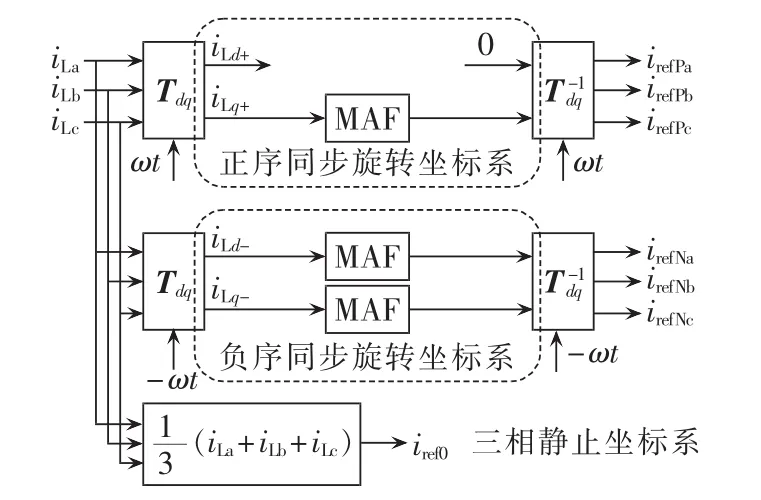
图3 不平衡负载无功指令的选择性提取方法Fig.3 Selective acquisition of reactive power reference for unbalanced load
当容量不足时,优先补偿负序无功和零序无功(即不平衡补偿模式)以保证电网电流平衡(irefj为无功补偿指令值):

当容量足够时,选择全补偿模式:

2 三相四线级联DSTATCOM分相控制策略
2.1 级联DSTATCOM拓扑结构及数学模型
图4为三相四线制级联DSTATCOM的主电路拓扑结构,每相由M个H桥单元级联构成,采用Y型接法通过滤波电感L接入电网,其中usj、isj为电网电压、电网电流(下标 j=a,b,c),iLj为负载电流;ucj、icj分别为DSTATCOM输出电压和电流。
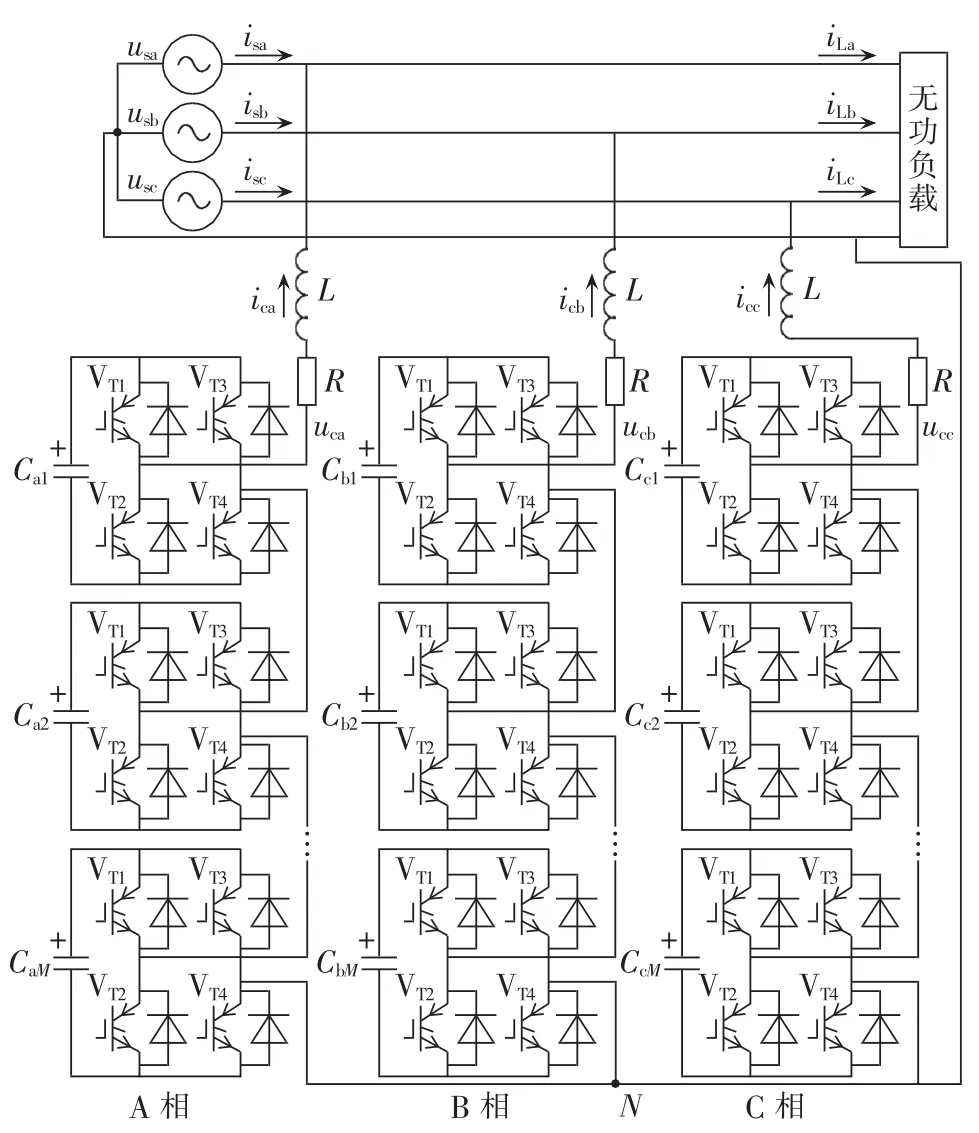
图4 三相四线制级联DSTATCOM拓扑结构Fig.4 Topology of three-phase four-wire cascaded DSTATCOM
三相四线制级联DSTATCOM为三相相互独立的非耦合系统,可以等效为3个单相DSTATCOM,其中分相被控对象的传递函数为:

2.2 级联DSTATCOM电流控制策略
在DSTATCOM分相控制策略中,无功指令irefj为交流量,PI控制跟踪交流量时存在稳态误差,因此引入基于内模原理的重复控制器,设计了基于PI控制内环和快速重复控制(FREP)外环的电流双环控制策略,如图 5所示,其中 GP(z)为受控对象,GPI(z)为内环PI控制器的传递函数,PI控制内环设置滞后一拍环节z-1,模拟采样及计算延时的影响;重复控制外环包括内模发生器、补偿环节S(z)及1/2基波周期延时环节z-N/2(N为一个基波周期内的系统采样点数)。双环控制系统中,PI控制内环为重复控制外环提供一个稳定的控制对象,重复控制则对PI控制环的控制误差进行修补,提高闭环系统的控制精度。
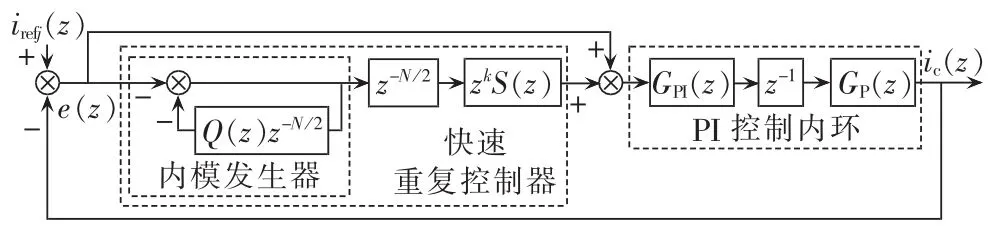
图5 基于快速重复控制的电流双环控制策略Fig.5 Double-loop current control based on FREP
在动态响应方面,传统重复控制(REP)需要N次采样才能对重复控制的内模进行一次更新,即需要滞后1个电网基波周期才能起作用,或者说存在1个基波周期的固有延时,而快速重复控制只需要N/2次采样就能对重复控制的内模进行一次更新,不仅占用存储空间减少一半,而且固有延时也减少一半。另外,双环控制策略由于误差前馈通道的存在,指令和扰动的动态变化将通过前馈通道直接加载到PI控制环上,PI控制器可以立即对动态变化做出响应,动态响应速度主要取决于PI控制内环闭环带宽。因此,PI控制器既起着为重复控制提供稳定控制对象的作用,又负责系统动态响应速度。
快速重复控制的内模发生器对信号周期性积分,基波和谐波抑制能力良好,在离散域中传递函数为:

其中,Q(z)通常取略小于1的常数,用于改善系统稳定性;z-N/2为1/2基波周期延时环节。
补偿器为相位矫正环节zk和二阶滤波环节S(z)的串联组合:相位矫正环节用来矫正补偿带宽内的相位滞后,通过1/2基波周期延时实现超前矫正;二阶滤波器对高频振荡进行衰减,保证系统的稳定,同时减小对低频段相位补偿的影响。
学生通过初步地撰写和小组合作完成大学生科技创新计划,了解基本的课题申请,并自我约束建立从事科研的兴趣,获得主动解决问题的能力。教师在该过程中起指导作用,对于具有较好创新型的选题,在教师的指导下,通过参加大学生创新论坛大赛等比赛项目,进一步增强学生的参与感,调动其从事科研的积极性和兴趣,在实践中培养创新能力。
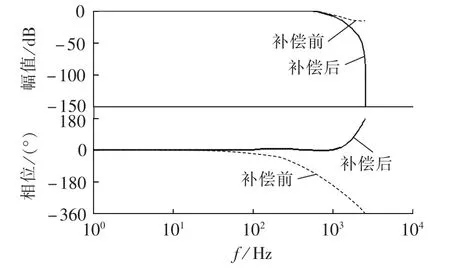
图6 补偿前后的内环频率特性Fig.6 Frequency characteristic of inner-loop without and with compensation
图6给出了补偿前后的内环频率特性对比,可以看出,补偿后控制器在更宽频率范围内,实现了对指令零幅值衰减、零相位滞后的跟踪。
2.3 级联DSTATCOM直流母线电压均压控制策略
直流母线电压的稳定与均衡,是级联DSTATCOM稳定工作的前提条件。直流母线电压控制有2个目标:每相直流母线总电压稳压控制;每相相内直流母线电压均衡控制。
直流母线总电压控制是在不外加均压电路的情况下,通过与电网进行有功功率交换来实现,如图7所示,其中udcref为单级直流母线电压设定值,udcjm为第 j(j=a,b,c)相的第 m(m=1,2,…,M)级直流母线的电压值。由于被控量为直流量,所以PI控制器能很好地完成总直流母线电压控制,总电压控制的输出idcrefj作为第j相的有功电流指令。

图7 DSTATCOM直流母线总电压控制框图Fig.7 Block diagram of total voltage control for DC-link of DSTATCOM
相内直流母线电压均衡控制则是通过在每个H桥的电压调制信号中叠加一个用于均压的电压参考量 ubanjm(j=a,b,c;m=1,2,…,M),该电压参考量与装置对应相的输出无功电流同相位或者反相位,此时H桥单元会吸收或者释放有功功率,从而达到平衡直流母线电压的目的。
综上所述,级联DSTATCOM的分相控制(以a相为例)结构如图8所示,irefa为选择性补偿的无功电流指令,idcrefa为有功电流指令,ica为补偿电流反馈值,分相控制的输出urefam则为第m级H桥单元输出电压的调制信号值。
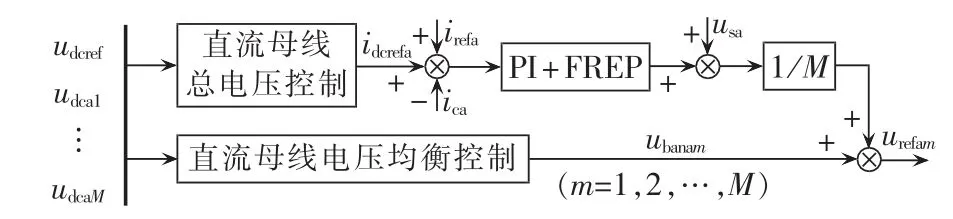
图8 基于快速重复控制的DSTATCOM分相控制策略Fig.8 Individual phase control based on FREP
3 仿真研究
为验证不平衡无功指令选择性提取方法的正确性以及基于快速重复控制的级联DSTATCOM分相控制策略的有效性,利用MATLAB/Simulink软件建立10 kV的三相四线制级联DSTATCOM系统模型进行仿真验证。系统主要参数如下:交流滤波电感2 mH,直流母线电容5 mF,开关频率1 kHz,采样频率5 kHz,每相级联数为11,调制方法采用单级倍频载波移相正弦波脉宽调制(CPS-SPWM),每一级直流母线电压指令udcref设定为900 V,负载为三相四线制不平衡阻感负载。
图9为采用传统重复控制和快速重复控制策略时DSTATCOM系统的动态性能的仿真结果,其中iref为给定电流指令,ic为DSTATCOM输出电流。

图9 采用不同重复控制DSTATCOM动态性能Fig.9 Dynamic performance of DSTATCOM for different repetitive controls
仿真时DSTATCOM按照给定电流指令空发无功电流,电流指令在0.2 s时突变,由图9可以看出输出电流立即跟踪指令变化,主要是PI控制起作用,但是跟踪误差较大。传统重复控制在指令突变后的第1个基波周期内未起作用,从0.22s才投入工作;而快速重复控制只经历了半个基波周期,在0.21 s之后便已投入工作,响应速度更快。当重复控制运行稳定后,跟踪误差很小,与理论分析相吻合。
图10为DSTATCOM补偿不平衡负载时选择性补偿的仿真结果,不同补偿模式下电网电压与电网电流的相位关系如图11所示,其中iL为负载电流,ic为DSTATCOM输出电流,us、is分别为电网电压和电网电流,udc为a相11级H桥单元的直流母线电压。
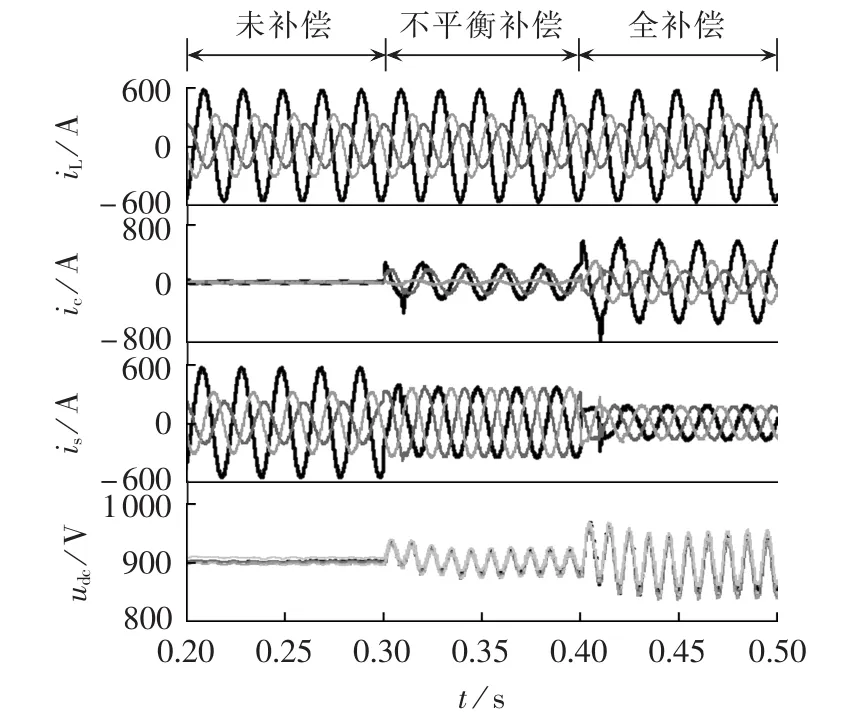
图10 DSTATCOM不平衡无功补偿效果Fig.10 Results of unbalanced load compensation by DSTATCOM

图11 电网电压与电网电流Fig.11 Grid voltages and grid currents
在0.3 s之前DSTATCOM并不补偿负载无功,此时输出电流很小,主要用于维持装置自身的直流母线电压平衡,网侧电流近似等于负载电流且不平衡;0.3 s时DSTATCOM转入不平衡补偿模式,补偿负序和零序电流,此时网侧电流趋于平衡,但从图11可看出电网电压与电网电流间存在相位差,系统功率因数较低;从0.4 s开始,DSTATCOM进入全补偿模式,补偿全部无功电流,此时输出电流增大,电网电流则进一步减小且依旧平衡,同时由图11可知电网侧三相电流与对应相的电压几乎同相位,即电网基本只提供负载消耗的有功电流,仿真结果表明稳态时系统功率因数高于0.98;此外整个过程中,装置各H桥单元的直流母线电压均能稳定在电压设定值上下且均衡度好,直流母线电压上100Hz的波动是由无功电流充放电引起,幅值随输出无功电流的增大而增大。
为便于分析,定义三相电网电流的不平衡度ΔIs如式(12)所示,其中Ismax、Ismin分别为三相电网电流有效值的最大值和最小值。

表1 列出了DSTATCOM工作于不同补偿模式稳态时电网电流的分析结果,可以看出进行不平衡补偿以及全补偿时电网电流平衡度很好,且总谐波畸变率(THD)始终小于2.4%。
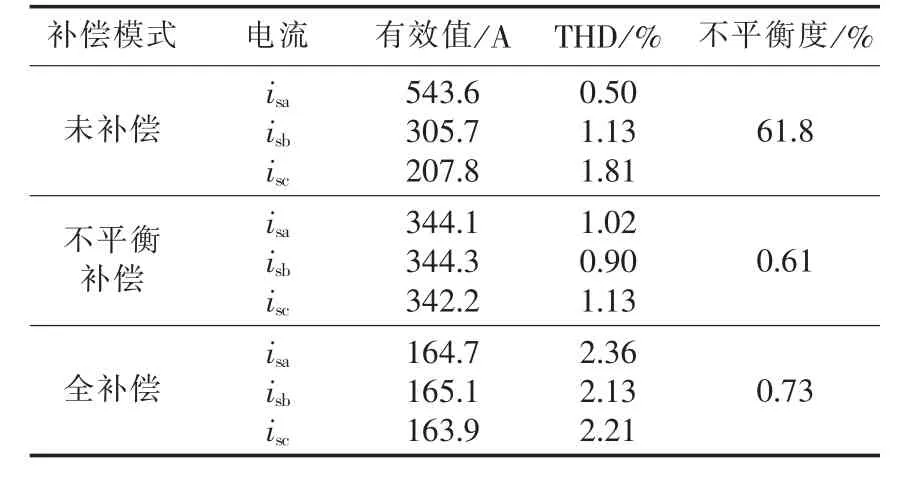
表1 不同补偿模式下补偿效果Table 1 Results of unbalanced compensation for different compensation modes
4 实验结果
为进一步验证上述分析,在380 V三相四线制电网条件下搭建级联DSTATCOM系统:开关频率定为2.5 kHz,每相级联3个H桥功率模块,每级直流母线电压设为200 V,其余主要参数与仿真模型相同。图12为不平衡负载的电流波形,三相电流不对称。
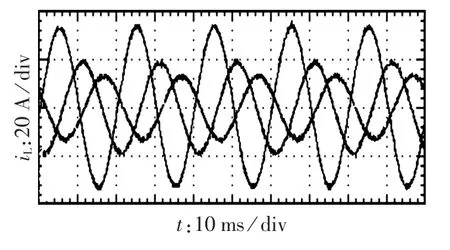
图12 不平衡负载电流波形Fig.12 Current waveforms of unbalanced load
图13为不平衡补偿模式的实验结果,在补偿负序无功及零序电流之后,电网电流已趋于平衡。但由于正序无功的存在,电网电流有效值较大。

图13 不平衡补偿模式实验结果Fig.13 Experimental results of unbalanced compensation mode
图14为全补偿模式的实验结果,在补偿全部的无功电流及零序电流后,电网电流仍旧平衡,且有效值进一步减小,此时电网只提供负载所消耗的有功电流部分,电网侧效率大幅提高。
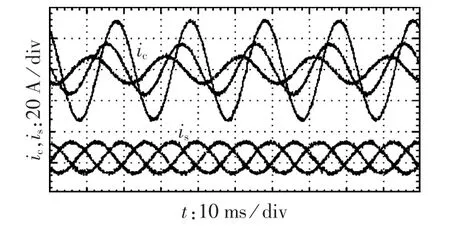
图14 全补偿模式实验结果Fig.14 Experimental results of full compensation mode
5 结论
针对三相四线制不平衡无功负载的特点,采用正、负序同步旋转变换分别提取基波正序、负序无功分量,便于根据级联DSTATCOM系统容量灵活选择不同补偿模式。
采用静止坐标系下的级联DSTATCOM瞬时电流分相控制策略,基于PI控制内环和快速重复控制外环的电流双环控制策略在提高系统的补偿精度的同时保证动态性能,所采用直流母线电压均压方法可实现直流母线电压的稳定与均衡。仿真和实验结果证明了分析的正确性和可行性。