BDS/INS组合导航技术研究进展
2015-09-18蔡成林
李 红,蔡成林
(1.桂林电子科技大学计算机科学与工程学院,桂林541004;2.桂林电子科技大学信息与通信学院,桂林541004)
BDS/INS组合导航技术研究进展
李红1,蔡成林2
(1.桂林电子科技大学计算机科学与工程学院,桂林541004;2.桂林电子科技大学信息与通信学院,桂林541004)
随着北斗卫星导航系统(BDS)建设逐渐完善,BDS与惯性(INS)组合导航研究已成为导航技术最具应用前景的研究热点。对BDS/INS组合导航关键技术的发展及应用现状进行论述。重点分析组合导航方式的实现原理及优缺点,归纳总结BDS/INS组合导航技术及研究现状,并介绍其应用研究进展,总结BDS/INS组合导航技术研究趋势,对进一步深入研究BDS/INS组合导航技术具有借鉴意义。
北斗二代;惯性导航;组合导航;滤波算法
0 引言
北斗二代卫星导航系统(BDS)是目前我国自主研制并计划在2020年完成整体系统构建的全球卫星导航系统。北斗二号致力于为所有用户提供持续可靠的授时、导航定位及短信报文服务[1]。但是在实际应用中还存在易受干扰、数据输出频率低及动态环境下精度低可靠性差等不足。尤其在高动态环境下导航系统的输出滞后、信号不易捕获等情况下会进一步降低北斗导航系统的定位精度,因此单纯依赖北斗导航系统进行导航是不够的。
惯性导航系统(INS)是一种完全自主的导航系统,具有纯自主,可提供连续实时的全参数导航信息,具有短时精度高、抗干扰能力强等特点,但同时也存在导航误差随时间积累呈发散趋势的局限性,通常将其与其他导航系统提供的信息源进行组合导航。在组合导航方式中,惯导与卫星组合导航是目前最常见的组合形式,以修正惯导随时间累积误差,提高卫星导航抗干扰及重捕获等性能,从而达到提高导航系统的总体性能[2]。本文主要对BDS/INS组合导航技术研究及发展现状进行归纳论述。
1 BDS/INS组合方式分析
在BDS/INS组合导航研究中,可将BDS/INS进行多种不同方式的组合,按照不同深度导航组合方法可大致分为松组合、紧组合和深组合三类[3]。BDS/INS不同的组合方式会带来不同的实现难度及导航性能。
如图1所示,在松组合方式中将BDS及INS的位置、速度输出量差值作为组合滤波器的输入值,通过滤波估计,对INS的导航信息输出量进行最优估计,并将估计值反馈给INS进行误差修正。松组合方式不仅结构简单,工程实现难度低,还能有效提高导航系统的可靠性、连续性及定位精度。
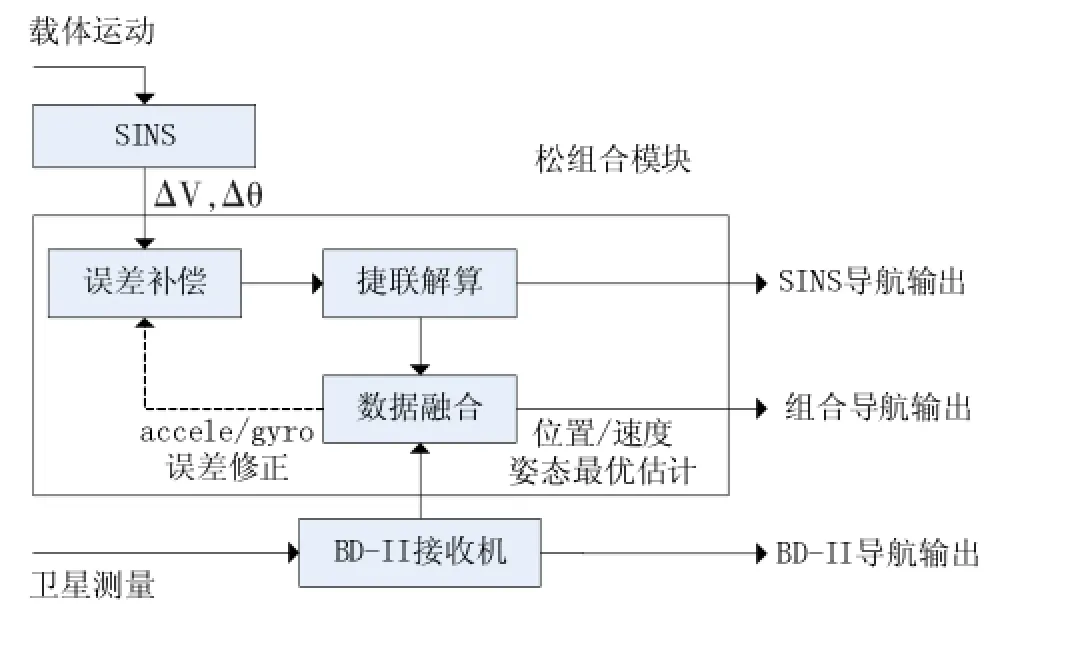
图1 松组合方式原理图
如图2所示,紧组合方式的实现原理与松组合类似,都是将滤波估计值反馈给INS进行误差修正。不同于松组合的是,紧组合是将INS导航结果推算得到的伪距及伪距率与BDS接收机观测到的伪距与伪距率的差值作为组合滤波器的输入值,因此其工程实现要相对复杂一些。其优点是能更有效地修正INS器件误差及对准误差,较松组合方式能获得更高的精度。
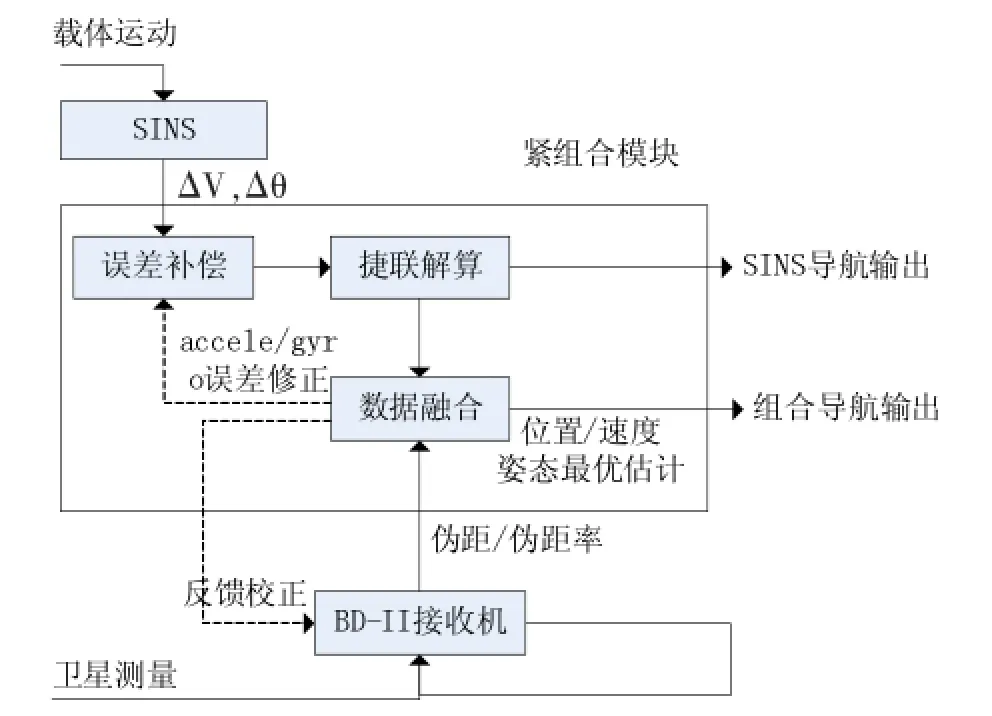
图2 紧组合方式原理图
松组合和紧组合方式主要是利用BDS辅助INS进行组合导航,两种导航系统工作在相对独立的状态,无法充分利用已有的导航信息[4]。如图3所示,深组合方式不仅会将估计值反馈给INS进行误差修正,同时还会利用INS修正后的速度信息对BDS接收机的载波环、码环进行辅助跟踪修正[5]。深组合的这种相互修正的实现方式使得BDS接收机可以充分利用INS提供的导航信息,达到无量测输入误差。
尽管在结构、滤波算法及工程实现等方面深组合会更加复杂,但其在高动态或强干扰环境下所表现的优异性能及对多路径效应有较好的抑制和修正作用等显著优点,使其成为备受研究者关注的组合方式。深组合与松组合及紧组合主要有以下几方面的区别:(1)松、紧组合导航中由GNSS单向辅助INS,而无法充分利用所有的导航信息,深组合中GNSS与INS相互辅助,通过进一步充分利用导航信息,而得到更高质量的导航性能。(2)松、紧组合导航中采用标量跟踪方式,跟踪与导航解算分为两步进行,而深组合采用矢量跟踪形式,跟踪和解算一步到位,在弱信号、低信噪比环境中,这种跟踪形式性能良好。
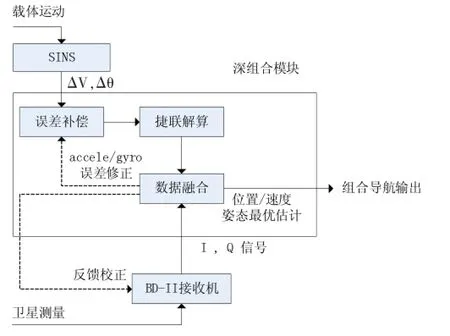
图3 深组合方式原理图
2 BDS/INS组合导航研究现状
目前用于提高组合导航系统定位精度及系统性能的方法通常会采用先进的硬件或软件方法来提高系统定位精度。在常见的卫星/惯性组合导航系统中主要利用惯导系统纯自主导航带来的短期高精度性能来弥补卫星导航接收机在干扰环境下信号捕获能力下降致使误差增大或发散的局限性,以提高卫星导航的重新捕获能力和抗干扰能力,同时惯导利用卫星导航系统的适中精度及可靠性来修正自身因时间累积而造成误差发散的缺陷,彼此取长补短,以构成满足实际需求的导航系统。
在确定硬件性能的情况下,滤波理论及融合算法对组合导航系统性能起着决定性作用[6]。传统卡尔曼滤波在理论上只适用噪声为高斯分布的线性系统,但组合导航系统本质上是非线性系统且为非高斯噪声[7]。为解决非线性系统的最优估计问题,A.H.J等人提出了扩展卡尔曼滤波(EKF)方法。粒子滤波算法(PF)算法不受限于高斯分布的假设,使得其善于处理组合导航系统中非线性非高斯情况下的滤波问题。但PF算法随机采样,需大量的粒子点来近似非线性函数的概率分布,因增大计算量而滤波实时性不能得到保证。为提高非线性系统滤波实时性和精度,S.J.Juliear和J.K.Uhlman提出了Unscented卡尔曼滤波(UKF)[8]。对非线性系统,UKF不需要再进行线性化处理,因而无高阶项的截断误差,性能优于EKF,同时UKF计算量明显小于PF。
EKF和UKF等KF只是对线性卡尔曼滤波方法的变形或改进,一般不适用于系统状态为非高斯分布的系统模型。但PF不受高斯假设及模型非线性系统的限制,适用于任何非线性非高斯的系统模型,所以相比而言,PF是非高斯非线性系统状态估计的“最优”滤波算法。郭瑶等人[9]从组合滤波器的角度出发,提出了一种新的载波/码组合滤波器,为北斗/惯导深耦合组合导航系统在工程实现上提供了一种有效的实现思路。探索适用于组合导航系统新的滤波方法,设计高效的滤波器,将成为组合导航技术进一步发展的趋势。
3 应用研究现状
北斗卫星导航系统自对用户开放使用以来,已被广泛应用到车载导航、基础测绘、通信服务、气象观测、海洋渔业、勘探等多个领域。随着北斗卫星系统建设的逐渐完善“北斗”导航在车载位置服务、测绘、应急求助等军民用市场得到批量应用,如在某高精度测量应用中“北斗”已占据1/3市场份额[10]。
“北斗”在民用导航定位服务上主要应用于两大产业:一是车载导航应用及周边服务;二是移动通信、终端导航定位及相关服务,并已在个人位置服务、气象观测、交通运输等领域取得广泛应用[11]。在军用方面,卫星组合导航系统将能加快军队信息化,与部队协同作战,实时传输、共享信息态势,对部队指挥控制、模拟训练等将带来帮助,将极大地提高军队信息化作战能力及现代化革新。凭借BDS/INS组合导航系统的高精度及可靠性将提高我国武器的精准打击力度,缩短武器反应时间。因此,应大力促进北斗卫星组合导航系统在军事及民用方面的应用,要在技术上实现多层次融合,在信息产业上实现多领域融合,以需求为驱动,带动技术革新,以技术创新为基石,促进组合导航技术进一步发展。
4 结语
近年来受高动态、抗干扰、高精度导航性能需求的推动,组合导航技术已成为导航技术最具潜力的发展方向。随着我国北斗卫星导航技术发展日臻完善,加速研究与BDS相关的组合导航技术对我国导航技术的发展具有重要的战略意义。随着巨大的市场需求,组合导航系统将会向着泛在导航,室内外无缝定位技术发展,成为促进现代导航位置信息服务核心推动力,对支撑导航与位置服务新兴产业的发展,将会带来巨大的发展前景和商业价值。
[1]杨元喜.北斗卫星导航的进展、贡献与挑战[J].测绘学报,2010(01):1~6
[2]全伟,刘百奇,宫晓琳等.惯性/天文/卫星组合导航技术[M].北京:国防工业出版社,2011
[3]蒋庆仙,田育民,孙葵.北斗/INS组合导航关键技术分析[J].全球定位系统,2010,6:56~60
[4]王新龙,于洁.基于矢量跟踪的SINS/GPS深组合导航方法[J].中国惯性技术学报,2009,17(6):710~717
[5]陈偲,王可东.惯性导航与卫星导航紧耦合技术发展现状[J].全球定位系统,2007,32(3):21~26
[6]杨元喜.多传感器融合导航方法的比较[J].测绘科学与工程,2006,26(2):1~3
[7]赵琳,王小旭等.组合导航系统非线性滤波算法综述[J].中国惯性技术学报,2009,17(1)
[8]Julier S J,Uhlmann J K.A New Approach for Filtering Nonlinear System[C]Proceedings of the 1995 American Control Conference, 1995:1628~1632
[9]郭瑶,吴文启,唐康华等.北斗/INS深耦合接收机基带滤波器设计[J].中国惯性技术学报,2013,21(01):71-75.
[10]冉承其.北斗卫星导航系统运行与发展[J].卫星应用,2014,(08).
[11]李克昭,韩梦泽,孟福军。北斗系统的特色、机遇与挑战[J].导航定位学报,2014,(2).
Research Progress of BDS/INS Integration Navigation Technology
LI Hong1,CAI Cheng-lin2
(1.School of Computer Science and Engineering,Guilin University of Electronic Technology,Guilin 541004;
2.School of Information and Communication,Guilin University of Electronic Technology,Guilin 541004)
With the development of the Beidou satellite navigation system technology,the study of BDS/INS has been a research focus currently.Discusses the development and application status of BDS/INS integrated navigation technology.Focuses on the pros and cons of principles of the integrated navigation method,further sums up the current BDS/INS integrated navigation technology and the current status,as well as it's application and research progress.Then summarizes the trends of the research of BDS/INS integration technology and providing valuable reference for further study of BDS/INS integration navigation technology.
BD-2;Inertial Navigation System;Integrated Navigation System;Filter Method
1007-1423(2015)11-0065-04
10.3969/j.issn.1007-1423.2015.11.013
李红(1987-),男,湖南娄底人,硕士研究生,研究方向为北斗与惯性组合导航技术
2015-03-12
2015-03-30
