基于嗅探空闲状态的智能变电站断路器远程试验方法
2015-09-17宋亮亮袁宇波
宋亮亮,袁宇波,高 磊
(江苏省电力公司电力科学研究院,江苏 南京 211100)
0 引言
变电站中断路器性能与电网方式调整操作及故障快速隔离密切相关,一次新设备正式投运前通常需要在额定运行电压下进行带电试验,考核设备整体绝缘性能。断路器现场试验通常涉及单分单合操作,对具有重合闸功能要求的线路需进行分合分操作,以模拟线路重合于故障后断路器快速切除故障的能力。
常规变电站中断路器试验通常采用程控箱完成,分合闸命令直接接在断路器操作箱出口回路上完成其投切操作。随着智能变电站的建设推广,智能终端作为断路器操作命令的执行装置,被布置于就地一次设备开关场,与保护小室的距离往往有数十米甚至上百米。同时测控装置至智能终端的遥控命令采用面向通用对象的变电站事件(GOOSE)报文通信替代原先的电位信号,传输介质由电缆变为光纤,因此常规的断路器试验方法将不再适用。近年来,随着智能变电站数量的快速增加,如何开展站内断路器投切试验成为困扰现场的一个重要难题。
本文在分析智能变电站通信原理的基础上,提出了一种基于模拟测控装置实现对断路器远程操作的方法,并分析了现场实际应用情况。
1 断路器远程控制方法概述
GB50150—2006《电气装置安装工程电气设备交接试验标准》规定[1]:1 kV以上架空电力线路的试验项目应包括冲击合闸试验;在额定电压下对架空线路的冲击合闸试验应进行3次,合闸过程中线路绝缘不应有损坏。空载线路的投切试验主要是考核新建线路和设备的绝缘。
分合分试验是指按断路器的额定操作循环投切空载线路,即分闸-合闸-分闸,其中开关无流和有流的2个时间间隔典型值分别为0.3 s和0.06 s。该试验用于测试线路永久性故障时,重合闸动作后断路器再次可靠快速分闸的性能[2]。
对于采用综合自动化系统的变电站,监控系统通过测控装置下发远程控制命令,完成断路器或隔离开关的分闸/合闸操作。测控装置与后台之间的通信方式采用IEC60870-5-103规约或IEC61850规约,这2种通信方式在实施断路器控制时均需进行数据返校,即一个命令的执行必须在上一个操作命令执行完成并返回后才能继续。由于从遥控命令下发至开关位置返回的时间通常需要数秒,所以无法在很短时间内进行连续的分合闸操作。针对该问题,常规变电站在进行断路器投切时,采用将程控箱的分合闸命令信号并接至测控装置的手合/手分出口回路,并可根据实际情况精确调整分合闸命令间隔时间,试验接线示意如图1所示。该方法在常规变电站室内试验接线较短的情况下较为常见。
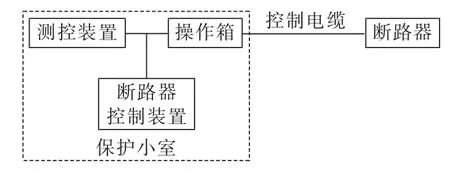
图1 常规变电站断路器试验接线示意图Fig.1 Wiring of breaker experiment for traditional substation
2 智能变电站断路器远程控制方案
国际电工委员会(IEC)制定的变电站内通信网络和系统标识体系IEC61850,已广泛应用于智能变电站保护监控系统的通信和设备建模环节,解决了规约统一性和设备互操作问题。IEC61850定义了不同服务类型的报文,用于实现设备间及设备与监控系统之间的信息交互[3]。
目前智能变电站采用智能终端采集就地一次设备本体信号及辅助监测信息,将开关量信号转换为IEC61850数字报文,并执行由保护测控装置发送的操作命令。智能终端与一次设备之间采用电缆连接,与保护测控装置采用光纤连接[4-5]。
对于一个完整的智能变电站系统,采用断路器远程命令控制方式有3种途径:
a.采用常规的电缆连接方式,由远程控制装置输出硬节点信号至智能终端的出口,直接控制断路器的分合闸;
b.远程控制装置从站控层以制造报文规约(MMS)方式模拟客户端下发命令给测控装置,由测控装置以GOOSE信号形式发送至智能终端;
c.远程控制装置直接在过程层模拟测控装置的GOOSE分合闸命令。
采用不同通信规约的断路器控制系统结构如图2所示。
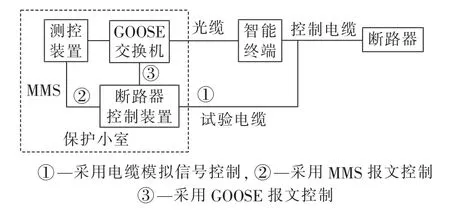
图2 智能变电站断路器试验接线示意图Fig.2 Wiring of breaker test for smart substation
2.1 常规电缆控制方式
对于智能变电站,测控装置与智能终端之间采用光纤回路连接,且智能终端布置于就地柜内,远离保护小室。若采用常规程控箱的方案,则需要将控制电缆从保护室并接至就地智能终端的分合闸出口回路上,由于这段距离通常大于100 m,复杂的电磁场分布会在试验电缆上感应出较高的电压,干扰试验仪器的正常工作,严重时可能影响智能终端直流控制电源的稳定性。
2.2 MMS通信方式
IEC61850的MMS通信[6]位于开放式系统互联(OSI)参考模型的应用层,定义了虚拟制造设备(VMD)及其内部的各种抽象对象,详细规定了每一种对象应具有的各种属性和相关的服务执行过程。MMS通信采用基于网络IP报文的方式,即需要服务端与客户端之间建立通信连接后才能进行信息交互,一个命令的完成包括使能、初始化、请求、响应、执行、反馈等多个环节。
若采用站控层测试仪来模拟监控系统,则存在测控装置客户端最大连接数受限和通信延时的问题。而且,由于网络报文的离散性及装置的缓存时间,整个控制序列的时间精度无法得到保证。
2.3 GOOSE通信方式
设计GOOSE网络协议时,为了降低报文处理过程中的延时,对原有TCP/IP协议堆栈进行了裁剪,去掉了网络层和传输层,使得链路层直接向上映射到会话层。为保证信息传输的可靠性,在应用层采取了相应的措施,包括报文重发机制、设定报文存活时间和数据品质参数等[7-10]。GOOSE报文的协议堆栈如图3所示。
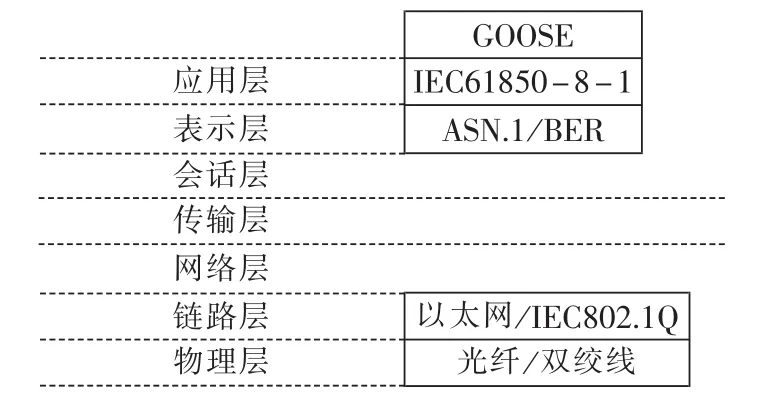
图3 GOOSE报文传输的协议堆栈Fig.3 Protocol stacks of GOOSE message transmission
和MMS报文不同,GOOSE报文属于快速报文,执行效率高。智能设备在处理接收到的GOOSE报文时基本不存在延时,技术规程规定从报文接收到节点闭合时间小于7 ms。因此,GOOSE通信方式可满足远程控制方法实时性的指标要求。
3 智能变电站断路器远程控制系统建立
GOOSE报文正常通信时按T0的间隔进行发送,以维持链路正常生存状态。此时报文中的stNum不变,sqNum递增,而在空闲时间没有任何报文交互。本文提出一种基于嗅探空闲状态的断路器远程控制方法[11-16],即在空闲时间内,模拟测控装置发送开关遥控变位报文,并且报文中的状态序号在实际报文的基础上递增,不影响原有设备的正常运行。控制系统的连接示意图如图4所示。
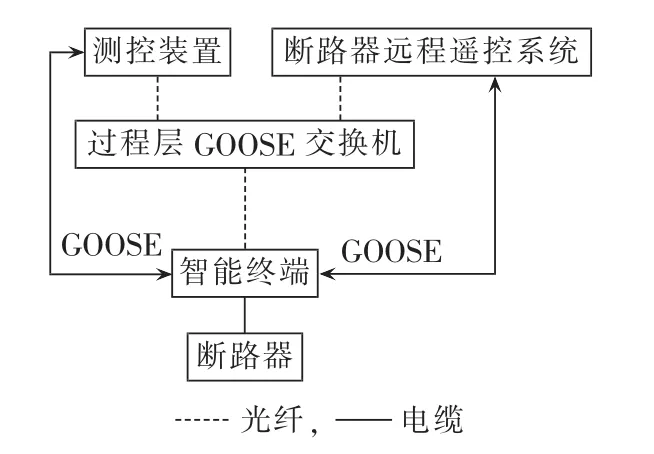
图4 断路器远程控制系统连接示意图Fig.4 Connection diagram of remote breaker control system
断路器远程控制系统连接在GOOSE交换机的冗余端口,可维持与被测智能终端之间的正常通信,接线简单并且不会改变现有网络结构。
3.1 远程控制系统结构
断路器远程控制系统包括GOOSE报文嗅探模块、GOOSE报文发送控制模块、记录存储模块、对时模块等,如图5所示。
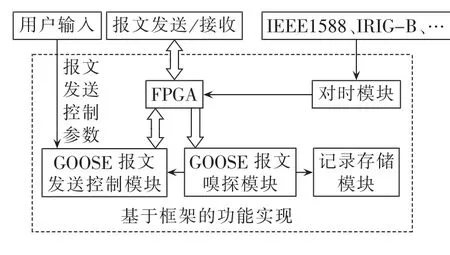
图5 断路器远程控制系统结构图Fig.5 Structure of remote breaker control system
各模块功能如下。
a.远程控制系统通过连接过程层GOOSE交换机,扫描并解析网络上所有GOOSE报文。用户从扫描列表中选择待测断路器对应测控装置的遥控报文,由系统自动添加至GOOSE报文发送控制模块。
b.GOOSE报文发送控制模块用于配置待发送报文的参数,分为两部分内容:基础参数,即报文MAC、SVID、VLAN、stNum、sqNum,以及各通道数值等;变量参数,如报文发送方式(单帧、双帧)及返回时间等。
c.记录存储模块用于记录并存储测试起始至结束时间内网络上所有的GOOSE报文,并直接展示各状态量的变位过程。
d.对时模块实现装置的对时功能,并保证其他各模块维持同步状态,确保报文解析和发送控制的精确性。采用FPGA打时标,对时模块支持IRIG-B码和IEEE1588格式报文。
3.2 远程控制系统工作模式
远程控制装置连接在智能变电站对应间隔的GOOSE交换机上,通过其嗅探模块获取网络上所有GOOSE报文并完成解析。用户从解析列表中选择待测断路器对应的测控装置进行遥控操作,将报文添加至GOOSE报文发送控制模块,在GOOSE报文发送控制模块中设定好待发送报文对应通道的值,选择报文发送方式和持续时间。设置完毕后进入测试准备环节,此时GOOSE报文嗅探模块自动将网络上该报文最新的状态参数stNum和sqNum赋给GOOSE报文发送控制模块,GOOSE报文发送控制模块根据下一状态自动对其进行更新。整个断路器远程试验过程如图6所示。图中,远程试验系统根据设定的断路器控制类型(如单分单合或分合分测试)和给定的报文发送参数自动完成投切试验。
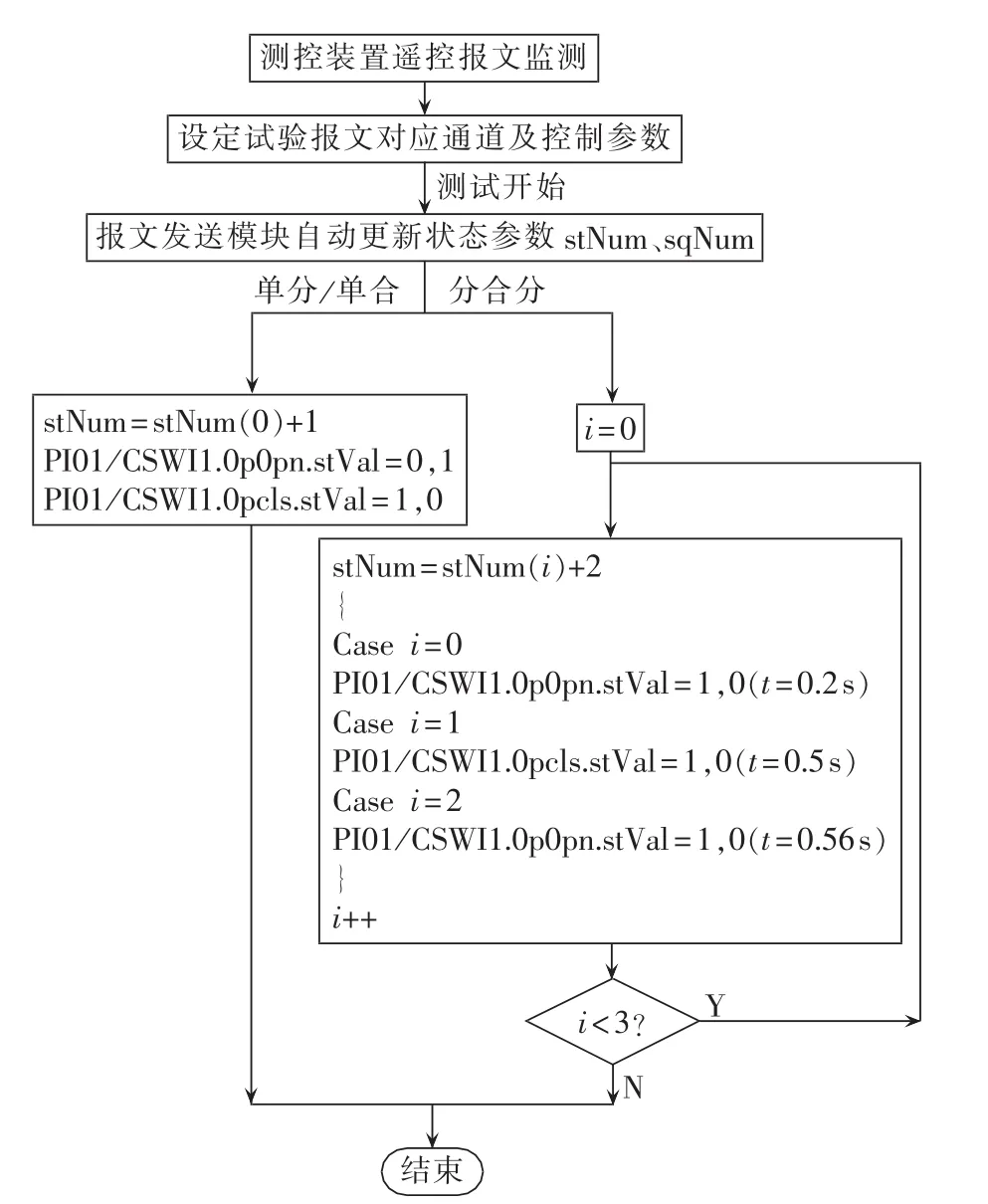
图6 断路器远程控制装置测试流程图Fig.6 Test flowchart of remote breaker control system
3.3 断路器远程试验案例
3.3.1 断路器分闸/合闸控制
用户选择断路器远方遥控装置中对应测控装置的遥控GOOSE报文,发送控制模块中将“遥控分闸(或合闸)”数据置为1,进入测试准备环节。GOOSE报文嗅探模块解析网络上该报文最新的状态参数stNum和sqNum,GOOSE报文发送控制模块实时更新待发送GOOSE报文的状态参数,即stNum(N)=stNum(N-1)+1,sqNum(N)=0。 “测试开始”触发后,GOOSE报文发送控制模块将在收到下一帧测控装置的GOOSE报文后,于测控装置的GOOSE报文发送间隔T0内发送控制报文,实现断路器遥控分闸(或合闸),触发完成后自动返回。其测试报文序列如图7所示,其中,t1、t2、t3为测控装置 GOOSE 报文的到达时刻。
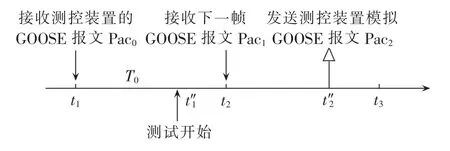
图7 断路器远程试验系统单次分闸/合闸序列Fig.7 Sequence of single open/close test of remote breaker test system
图7中,t1为远程控制系统接收到测控装置的报文的时刻;t″1为测试开始时刻,该时刻由用户指定;测试开始后t2时刻接收到下一帧报文,自动更新控制系统中待发送报文的通信参数,stNum增加,在T0时段内的t″2时刻发送测试报文。t″2的设置适当考虑智能终端处理上一帧GOOSE报文的时间,并保证控制装置需要发送的其他报文在t3时刻之前完成。
3.3.2 断路器分合分控制
用户选择断路器远方遥控装置中对应测控装置的遥控GOOSE报文,在发送控制模块中将“遥控分闸”和“遥控合闸”数据置为1,并对应设置“分闸”触发时刻 t″2和 t″4,以及“合闸”触发时刻 t″3,这 3 个时刻值应根据断路器分合闸间隔要求设定。GOOSE报文嗅探模块解析网络上该报文最新的stNum和sqNum,发送控制模块实时更新下一帧待发送GOOSE报文的状态参数,即 stNum(N)=stNum(N-1)+1,sqNum(N)=0。测试开始后,GOOSE报文发送控制模块将在收到下一帧测控装置的GOOSE报文后,于t″2、t″3、t″4时刻发送断路器遥控分合闸命令序列,其中每组分闸或合闸命令报文完成后均复位。测试报文序列如图8所示。通过对测控装置模拟报文发送时间间隔精确设定,可保证其在原GOOSE链路通信空闲时间内完成发送。

图8 断路器远程试验系统分合分序列Fig.8 Sequence of open-close-open test of remote breaker test system
4 问题分析
目前基于嗅探空闲状态的断路器远程控制系统已在工程中得到应用,测试技术指标满足要求。下面对试验环节中引起关注的问题进行分析。
a.GOOSE测试报文与交换机(VLAN)。
断路器远程控制装置接在过程层GOOSE交换机的冗余端口上,工程中该端口作为测试端口通常不分配交换机,测控装置和智能终端之间的报文可正常通过该端口。
b.MAC地址冲突。
正常运行时所有保护测控装置按调度方式要求投入(含装置自身及相应的二次回路),当远程控制装置经GOOSE交换机发送遥控报文时,网络中将同时存在2种数据集相同而源MAC不同的报文,由于GOOSE报文处理机制依据目标MAC、APPID、GOID等进行,这种情况并不会影响智能终端的逻辑判断。
c.测控装置报文stNum序号突变。
虽然断路器远程控制装置的发送参数可依据实际的测控装置的报文进行自动修正,但由于测控装置自身并没有数据集变位,因此试验结束后测控装置发送报文的stNum并不会改变。智能终端接收到该报文后,判断与前一帧报文不连续,根据不同厂家的处理机制,可能会报接收测控装置数据集断链。该现象在下一帧报文到来时立即复归,对现场运行操作无影响,并且不影响其他装置运行。
d.网络交换机延时影响。
正常运行时交换机的GOOSE报文流量很小,远没有达到标准规定的30%交换机额定容量。交换机的延时为微秒级,在该试验中,其对GOOSE报文传输的影响可忽略。
5 结语
本文结合智能变电站启动调试时断路器控制方法的局限,提出了一种基于嗅探空闲状态的断路器远程控制系统和方法,适用于智能变电站启动调试过程中对断路器的分闸、合闸、分合分操作。
通过并接在过程层GOOSE交换机上的方式,嗅探系统内的测控装置与智能终端之间交互报文,并且在该报文空闲时刻模拟测控装置下一事件,精确控制智能终端的分合闸命令序列。该方法不改变变电站现有网络结构,不影响交换机上其他智能电子设备的运行,已在多个智能变电站工程调试中成功应用。
