基于机械对称性的夹具对称性及应用
2015-09-17唐耀红何翠群
唐耀红,何翠群
(1.漳州职业技术学院;2.南昌工程学院)
0 引言
对称性广泛存在于机械工程领域,但对其系统研究和应用尚不多见.浙江大学机械设计研究所冯培恩、马志勇等人对机械工程领域内的对称性进行了深入研究,初步建立了机械对称性的理论体系[1-2];马志勇、邱清盈等人研究了机械对称性的概念体系,将机械领域的对称性归纳为结构对称性、原理对称性和功能对称性[2];浙江大学曾令斌在其博士论文《机械功能原理对称的概念及其应用知识体系的研究》中提出了机械功能原理效用对称性的概念和层次结构体系,深入研究了机械功能效用对称应用知识体系、机械原理效用对称应用知识体系,建立了机械功能原理对称辅助创新设计平台[3];刘屿对机械结构旋转对称性进行了研究,建立了机械结构旋转对称性概念体系,开发了计算机辅助机械对称性知识挖掘与应用的软件平台[4];马友才将对称群理论引入机械对称性的研究中,研究了机械零件对称性在其可制造设计中的应用[5].该文借鉴机械对称性的概念体系及作用原理,提出了夹具对称性的概念体系、作用原理及应用思路,将为夹具的设计、制造和管理开辟一个全新的空间和视角,对CAFD的进一步开发应用具有一定的指导作用.
1 夹具对称性概念及层次结构
夹具对称性是机械对称性的一个不可或缺分支.夹具系统中存在的多个组成要素(如夹具结构、夹具功能、夹具原理等)之间所具有的相互可替代性、一些有规律的重复性或不变性称为夹具对称性.夹具对称性同样具备三大要素:对称主体、对称组元及对称基准[2-6].对称主体是夹具对称性的某种或多种载体,如夹具原理与功能、夹具制造方法等;对称组元是具有对称特性的多个夹具组成要素,如实现夹紧的多个夹紧方案;对称基准指的是满足夹具对称性的参照或标准,如定位销的旋转轴.为扩展和完善现有机械对称性概念体系,进一步提高计算机辅助夹具设计的智能化与自动化水平,该文提出了夹具对称性的概念体系及层次结构,如图1所示.

图1 夹具对称性分类体系
夹具对称性Sf= <Ss,Sp,Sc,St> ,其中Ss为结构对称性,Sp为原理对称性,Sc为功能对称性,St为时空对称性.
1.1 结构对称性
如果夹具在结构域内具有一个或多个空间结构按照一定规律呈现出不变性或重复性,则称夹具这样的空间结构存在结构对称性.结构对称性的对称主体是夹具的空间结构;对称组元为一个或多个按照一定规律呈现出不变性或重复性的夹具结构体;对称基准为夹具整体或元件中的几何元素以及时间.结构对称性Ss=<Ssj,Ssm,Ssc>,其中Ssj为结构静态对称性,Ssm为结构动态对称性,Ssc为结构静动态对称性.
如果夹具系统在结构上具有多个相同的部分,且其空间位置对于某个或多个夹具几何基准具有规律性或规则性的分布特点,且其大小不变或变化有规律,则称该夹具系统具有结构静态对称性.例如,如图2所示是某焊接夹具的举升机构,该机构采用单气缸双导杆结构,其导杆在该夹具空间结构上就具备结构静态对称性.
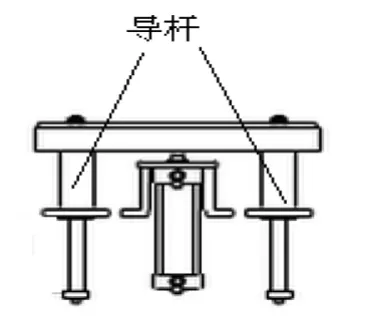
图2 焊接夹具举升机构
如果夹具系统的单个或多个夹具单元具有规律性随时间变化的过程,那么该夹具系统就具有结构动态对称性.例如,夹具的液压夹紧机构中,液压缸活塞及活塞杆的运动过程随时间呈现有规律的运动状态,重复实现释放——夹紧动作.
如果夹具系统中存在空间位置随时间变化而变化的结构对称的夹具单元,且在变化过程中其结构对称状态保持不变,则称该夹具系统具备结构静动态对称性.例如,如图3所示的三爪卡盘,其3个卡爪在空间上是周向对称的,在卡盘工作过程时卡爪做开合运动并始终保持3个卡爪的周向对称状态,所以此卡盘具有结构静动态对称性.

图3 机床卡盘
1.2 原理对称性
在夹具系统中,对于某一(种)夹具功能所需要的夹具原理,若有多个(种)夹具原理或夹具原理的组合都能实现该一(种)夹具功能,就可认为这多个(种)夹具原理或夹具原理的组合之间具有夹具原理对称性.根据对称性三大要素可知,夹具原理是夹具原理对称性的对称主体,能实现相同夹具功能的多个(种)夹具原理或其组合就是对称组元,而对称基准则是这些夹具原理要去实现的相同夹具功能.原理对称性Sp=<Spe,Spd,Sps>,其中Spe表示原理交换对称性,Spd表示原理分解/组合对称性,Sps表示原理选择对称性.
若存在多个(种)夹具原理,而这些夹具原理又都能够单独去实现同一夹具功能,那么就称对于要实现的夹具功能而言,这多个(种)夹具原理之间具有原理交换对称性.比如说,采用斜楔原理、螺旋原理、液压原理、气压原理、电磁原理等等都能各自独立实现夹具的夹紧功能,所以这些原理之间就具有原理交换对称性.
假设某一单个夹具原理与将多个(种)夹具原理组合起来形成的原理组合体能获得同一夹具功能,就称这单个夹具原理与原理组合体之间就有原理分解/组合对称性,即多个(种)夹具原理的组合体相对于单个夹具原理具有原理分解对称性,而单个夹具原理相对于多(种)夹具原理的组合体具有原理组合对称性.例如,夹具夹紧机构的动力源,既可采用气动夹紧,也可采用气压与液压组合夹紧,显然,气动夹紧与气压与液压组合夹紧之间就有了原理分解/组合对称性.
夹具原理选择对称性是指假如有多种夹具原理同时存在于夹具系统中也都可实现同一夹具功能,但在同一时间内只允许其中的一种夹具原理产生作用,而不允许多种夹具原理同时产生作用.例如液压夹具的液压控制回路都安装了溢流阀和安全阀,二者都是用来降低液压系统的压力.在正常情况下,是溢流阀起作用,只有当溢流阀失效使得系统压力超过安全阀设定的压力时,安全阀开始工作,以保证系统安全.
1.3 功能对称性
如果多个(种)夹具功能或功能组合可以实现相同的上一层夹具功能,则称对于其实现的上一层夹具功能而言,这多个(种)夹具功能或功能组合之间存在功能对称性.在这里,夹具手段功能是其对称主体;能实现相同上一层夹具功能的多个(种)夹具手段功能或功能组合是对称组元;对称基准则是相同目的夹具功能.功能对称性Sc= <Sce,Scd,Scs> .Sce表示功能交换对称性,Scd表示功能分解/组合对称性,Scs表示功能选择对称性.
若同一上层夹具功能既可用单个夹具功能来实现,也可用多种夹具功能的组合来获得,那么以这一上层夹具功能为基准,就称这单夹具功能对于夹具功能组合存在功能组合对称性,而夹具功能组合相对于该单夹具功能存在功能分解对称性.假设存在多种夹具功能,而它们中每种夹具功能都可以单独实现相同的上层夹具功能,则这多种夹具功能之间的相互可替代性就叫功能交换对称性.
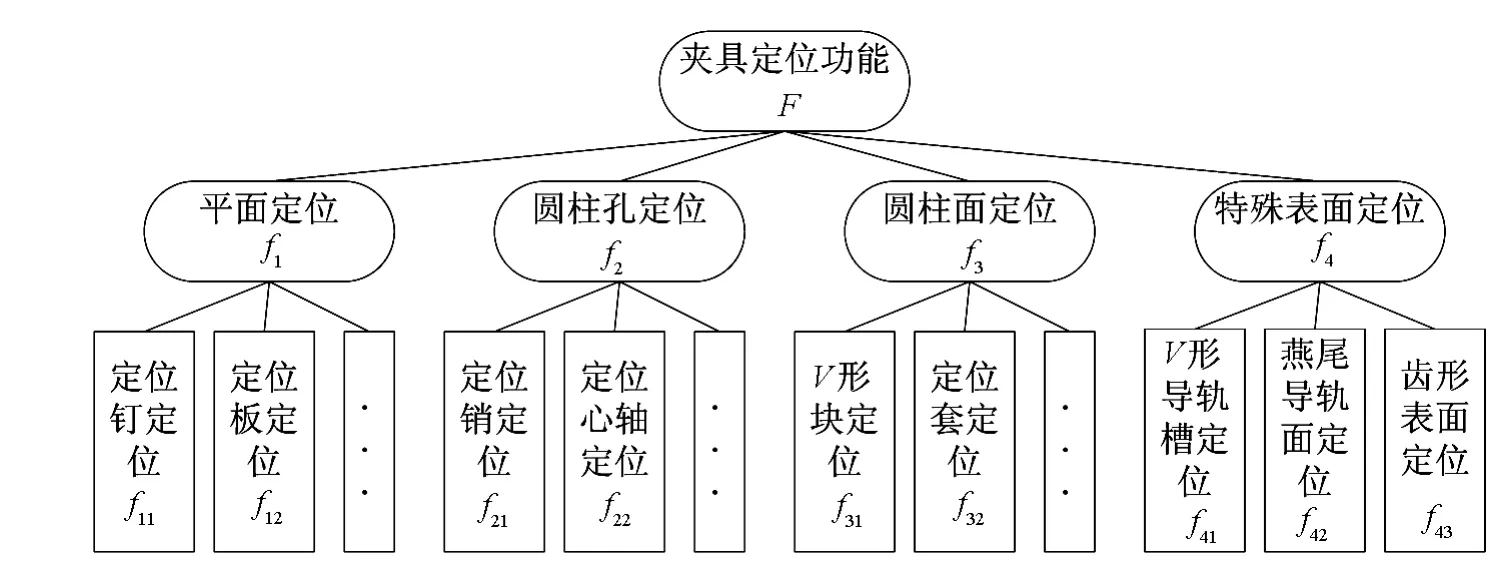
图4 夹具定位功能
如图4所示,夹具的定位功能是限制工件的6个自由度(F),可用平面定位f1、圆柱孔定位f2、圆柱面定位f3和特殊表面定位f4等来实现.f1和f2作为子功能并用时相对于上层功能F具有功能分解对称性;分别采用时,f1和f2之间则具有功能交换对称性.
如果夹具系统中存在多种夹具功能,它们都能同时实现相同的上一层夹具功能,但同时只允许选择其中的一种夹具功能时,相对于其实现的上一层夹具功能而言,就称这些夹具功能之间存在功能选择对称性.例如,气动夹具的气压控制系统为实现减压(A)的功能,采用减压阀减压(a1)和安全阀减压(a2)的方案.在正常情况下采用减压阀减压(a1),只有在减压阀异常或失效时,安全阀减压(a2)才开始作用.因此,功能a1与a2之间相对于A而言具有功能选择对称性.
1.4 时空对称性
夹具的时空对称性是指同一套夹具在使用、管理过程中具有时间或空间上的规律性的重复性.例如,在加工一批相同零件的同一道工序中使用的夹具,就具有典型的时间对称性;而用多台相同机床并行加工一批相同零件的同一道工序所用的夹具,则是典型的空间对称性的体现.
2 夹具对称性的应用
夹具对称性以整个夹具域为研究对象,涉及到夹具设计、夹具制造和夹具维护与管理等主要环节.夹具对称性概念体系及层次结构的建立,必会对夹具域的活动具有不可忽视的指导和引导作用.
2.1 结构对称性的应用
夹具的结构对称性在夹具域的应用主要在3个方面:(1)利用结构对称性满足夹具整体构形和夹具元件标准化的需求和约束;(2)利用结构对称性对夹具设计的过程和结果进行可制造性评价;(3)利用结构对称性提高夹具定位精度和夹紧可靠性.
2.2 原理功能对称性的应用
夹具设计的关键是装夹规划和构形设计.可以利用具有对称性的夹具原理或(和)功能解来实现:(1)拓展和优化夹具装夹方案与结构方案,获得最优的夹具设计结果;(2)夹具功能原理到夹具构形设计的需求、约束和规则求解;(3)夹具系列化,减少夹具库存,节约制造资源,缩短夹具准备时间;(4)提高夹具的通用性.
2.3 时空对称性的应用
利用夹具的时空对称性,企业可依据产品生产计划或订单:(1)系统规划夹具计划,提高夹具可重用性;(2)合理维护、管理夹具,实现企业级夹具统筹调配.
3 基于夹具功能对称性的夹具设计思路
利用夹具功能对称性,通过建立夹具功能模型和夹具功能集及夹具结构集,构造夹具功能集——夹具结构算法,在夹具设计知识、规则的支持下,获得夹具结构,是夹具对称性应用的核心和关键.
3.1 夹具功能模型
夹具的总体功能包括不允许过定位和欠定位、夹紧可靠和夹具约束等[7].夹具设计时一个重要任务就是将夹具的功能向夹具结构转化,所以夹具功能分析的重点是对夹具总功能进行分级分解,一直分解成最小的夹具功能单元,方便得到夹具功能与夹具结构之间的关系.每个功能单元可以用其具体的行为状态参数描述,如图5所示.
3.2 夹具功能集与夹具结构集
夹具的功能是由一定的夹具结构来实现的,因此夹具功能和夹具结构之间一定存在着某种或某些对应关系,但是这种对应关系不可能是一一对应关系(即某种夹具功能不会只对应一种夹具结构,反之亦然).为了研究这种对应关系,首先必须建立起由所有夹具功能组成的夹具功能集合和由夹具结构构成的夹具结构集合.
定义1 夹具功能集.是对夹具功能进行分解后形成的所有最小的夹具功能的集合,用F表示.F={F1,F2,…,Fn},其中F1,F2,…,Fn为最小的夹具功能单元.在夹具功能集内,Fi和Fj同属某类夹具功能时,具有功能对称性.
定义2 夹具结构集.是能够匹配至少一种(个)最小夹具功能的夹具元件的集合,用C表示.C={C1,C2,…,Cm},其中C1,C2,…,Cm为夹具元件.
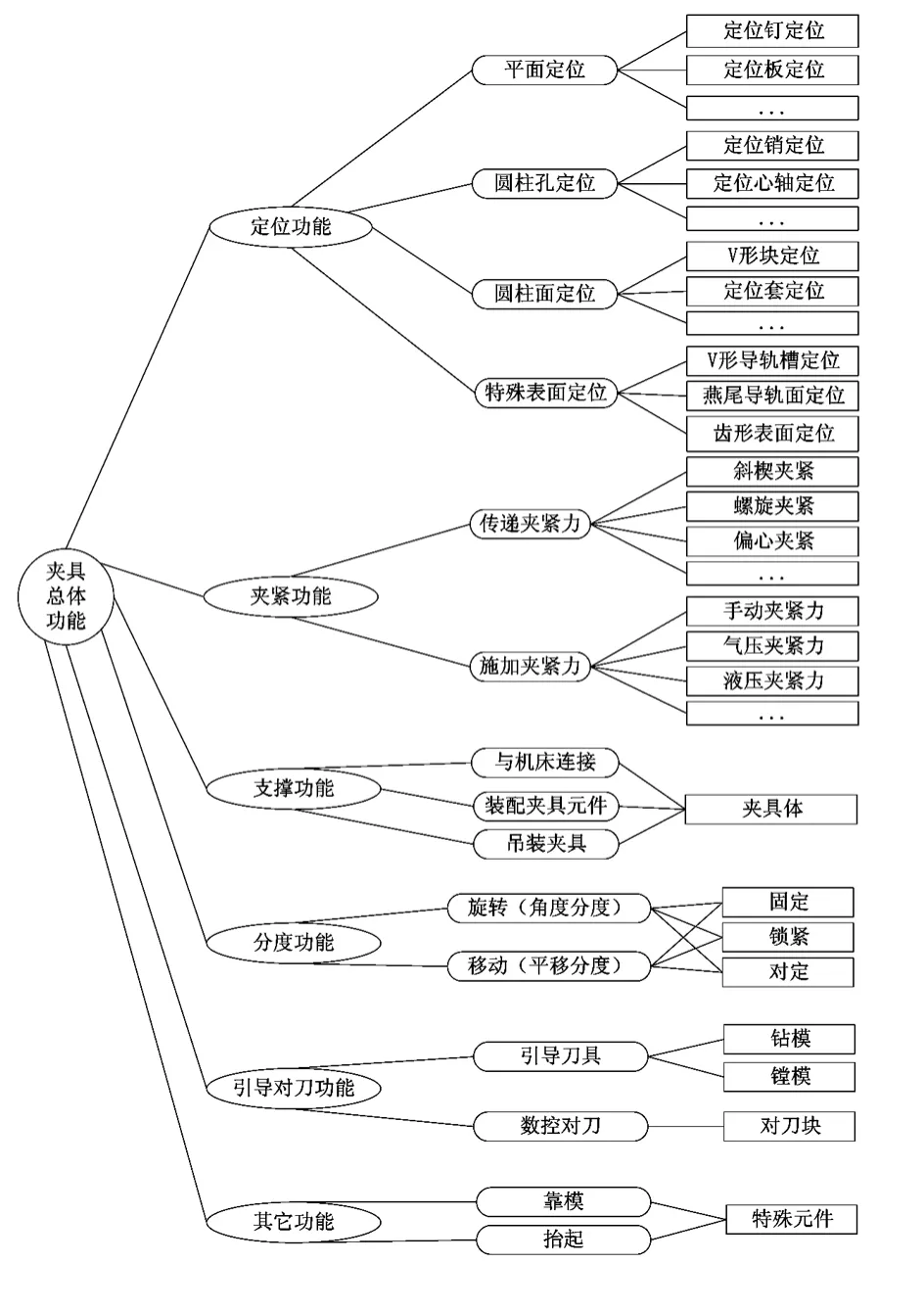
图5 夹具功能模型
3.3 夹具功能—夹具结构算法
由夹具对称性可知,夹具功能与夹具结构的对应关系是多对多的对应关系,即某种夹具功能可能有多种夹具结构来实现,而某一夹具结构则可能满足多种夹具功能.为找到某一夹具功能所对应的夹具结构,需要在二者之间确定某种匹配关系,即夹具功能——夹具结构算法.由于可以实现某一夹具功能的多种夹具结构之间差别并不大,这就给夹具设计者带来困扰;同时,夹具设计者的经验往往对夹具设计产生很大影响,因此不大可能用某种确定的函数关系给出夹具功能与夹具结构之间的匹配关系,因此,可运用模糊方法给出夹具功能与结构之间的匹配关系,根据夹具的功能需求,实现功能向结构的转换,获取该功能的夹具结构.
运用模糊方法给出夹具功能与结构之间的算法的关键是建立夹具功能到夹具结构之间的模糊匹配关系,该关系可以用模糊矩阵(R)进行表达.
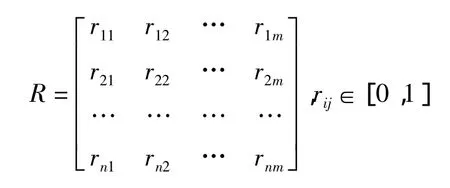
设R是一个n×m维矩阵,R的行表示有n个夹具功能,R的列表示有m种(个)与夹具功能对应的夹具结构.R的元素rij是根据夹具规则和知识确定的夹具功能与夹具结构相匹配的程度,该匹配程度往往是模糊的,用介于0和1之间的数字来表达.
由夹具功能模型可知,夹具功能可以用影响该夹具功能的状态参数进行表达,如影响定位功能的主要状态参数有定位面的分类、大小、限制的自由度、表面粗糙度等.可根据影响夹具功能的状态参数建立夹具功能到夹具结构之间的模糊匹配关系矩阵R.
夹具功能—夹具结构算法过程为:根据待加工工件的工序信息进行功能分析→确定夹具功能集→确定影响夹具功能的状态参数→利用状态参数将夹具功能集模糊化→得到模糊参数表示的夹具功能集→根据知识确定R→得到夹具结构集→根据规则得到夹具结构.
4 结束语
夹具对称性无疑是机械对称性领域内的一个重要内容,该文提出的夹具对称性概念体系及其层次结构,以及其作用原理和应用思路,是对机械对称性理论体系及其应用的又一补充和完善.建立的夹具功能模型、给出的夹具功能集和夹具结构集的定义、并在此基础上提出的夹具功能——夹具结构算法的思路,为夹具的方案设计开辟了一种新的视觉,有利于计算机辅助夹具设计的开发与完善.
[1] 冯培恩,马志勇,等.从自然科学到工程科学的对称性本体论研究[J].自然科学进展,2008,18(12):1441-1450.
[2] 马志勇,邱清盈,等.机械对称性的概念体系及其应用方法[J].浙江大学学报:工学版,2010,44(12):2354-2359.
[3] 曾令斌.机械功能原理对称的概念及其应用知识体系的研究[D].浙江大学博士学位论文,2013.1.
[4] 刘屿.机械对称性知识挖掘方法及其在机械结构选装对称性中的应用[D].浙江大学硕士学位论文,2012.6.
[5] 马友才.机械零件对称群分析及其在可制造性中的应用[D].浙江大学硕士学位论文,2012.3.
[6] 冯培恩,刘伟平,等.机械制造工艺对称性的概念体系及其应用思路[J].工程设计学报,2010,17(3):161-167.
[7] 刘长安,杨志宏,等.基于功能特征结构映射的夹具设计模型与方法[J].计算机集成制造系统,2006,12(8):1192-1197.
