基于改进型滑模观测器的逆变器开路故障诊断
2015-09-13蔡志端王玉龙王玉玲
蔡志端,王玉龙,王玉玲,荀 倩
(1.湖州师范学院 工学院,湖州 313000;2.浙江超威创元实业有限公司,湖州 313100)
0 引言
据统计在工业应用中38%的事故是由于功率电路引起[1],功率半导体器件失效故障占总故障的21%;关于功率变换器稳定性的一个工业调查显示认为功率器件和驱动是脆弱的人分别占31%[2]。同样,在永磁同步电机调速系统驱动电路中,逆变器的功率半导体器件及其控制电路是最易发生故障的薄弱环节。当功率器件发生故障时,如果不及时诊断并加以消除,将造成二次故障发生,最终导致系统瘫痪停机,给工业生产带来极大经济损失或者安全事故。为此,针对逆变器的故障诊断尤为重要。
目前针对逆变器的故障诊断得到了广泛研究,文献[3,4]对相关的诊断技术进行了综述。目前,功率变换器故障诊断研究的热点是电机变速系统中电压源逆变器的开路故障。从检测变量的角度可将故障诊断方法分为基于电流量和基于电压量的诊断方法。基于电流的故障诊断方法更会受闭环和负载变化的影响[5]。基于电压法相对基于电流法诊断速度快,对负载变化不敏感,但需要额外增加电压传感器。按照故障诊断权威P.M.Frank教授对故障诊断方法的分类可将故障诊断方法分为三大类:基于解析模型[6,7]、基于信号处理[8,9]、基于知识[10]的开路故障诊断方法。其中,基于解析模型中的状态观测器残差生方法成已成为重要的故障诊断方法之一。无故障情况下,残差值较小或者趋近于零,而当系统有故障时残差值相比无故障时有明显变化,通过设置一阈值,并将残差与设置的阈值比较即可实现故障的诊断。文献[11~13]针对功率变换器开路故障采用龙贝格状态观测器计算相电流残差实现诊断。以上状态观测器的输出会受到系统参数变化或输入扰动等不确定性影响,而为了提升故障诊断的鲁棒性,常要求故障诊断方法对系统存在不确定干扰输入下也能正确完成故障检测与识别。滑模观测器继承了变结构控制算法良好的鲁棒性优点,在系统参数或者外部扰动等不确定性存在时都能保持良好的输出,产生对不确定干扰具有鲁棒性而对故障信息具有敏感性的残差[14]。文献[2,7]采用滑模观测器估计相电流,由于该文献中滑模控制律采用的是开关切换函数,其抖振抑制效果不理想,降低了故障诊断的准确率。所以,在充分利用电机矢量驱动系统中已有的参数,避免增加额外传感器情况下,本文针对永磁同步电机矢量控制驱动系统中三相电压源逆变器功率管开路故障,提出一种基于改进的滑模观测器和二维静止坐标系中电流相角度的故障诊断方法。滑模观测器选用一种改进型切换控制函数来抑制抖振,提升故障诊断的正确率和对外界干扰的鲁棒性;选用电流相角度为故障特征量,提升故障诊断方法的鲁棒性。最后,通过仿真实验验证改进型故障诊断方法正确性和强鲁棒性能。
1 滑模观测器设计
表面贴式永磁同步电机驱动电路如图1所示,逆变器采用电压矢量控制120度导电方式。在同步旋转坐标系下逆变器数学模型为:
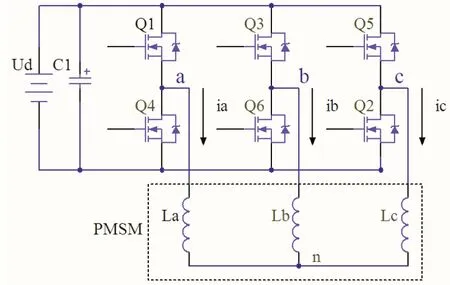
图1 永磁同步电机驱动电路

式中uα、uβ为定子相电压在二维静止坐标系α、β轴分量;iα、iβ为定子相电流在α、β轴分量;L、Rs为定子等效电感和等效电阻;J分别为转子角速度,永磁体磁链,转子位置,和转动惯量。根据式(1),式(2)数学模型,状态方程简记为:


根据滑模变结构控制理论与式(2)设计滑模观测器状态方程为:


s 为符号函数:

由于符号函数的不连续性和高频切换使得电流估计值在滑模面发生高频抖振,大大降低了估计值的准确性,甚至危及观测器的稳定性[15,16]。为此,考虑滑模控制过程抖振抑制问题,改进滑模控制量,采S型函数Sigmoid函数[17]替代不连续的符号函数作为切换控制量,达到减小高频抖振的目的,其中:

改进后的滑模观测器为:

2 基于滑模观测器的故障诊断
故障诊断的核心思想是在不同的开关状态下计算观测器输出值与逆变器实测值之间的残差,比较残差与阈值的大小。若残差大于所设阈值表示相关相有开路故障,否则逆变器正常无故障。故障诊断包括故障检测与故障定位两部分。由于永磁同步电机系统是一变速系统,驱动系统中逆变器电流依赖于电机转速与负载,所以故障诊断方法必须对电机负载和转速具有强鲁棒性。
故障检测是判断整个逆变器是否正常,本文提出的故障检测方法是基于二维静止坐标系下,以横纵轴两电流分量相位角为故障特征量,计算观测器值与实际值的残差。


永磁同步电机矢量控制中,电流相角度θ与电机转速相关,对电机负载不敏感。电机转速可直接由转子机械角度θm求导计算获得。由于永磁同步电机矢量控制中,转子机械角度可以通过电机位置传感器获取。所以,电流相电角度实际值θ是可以通过转子机械角度θm计算获得,其关系为:

其中p为电机极对数。
根据公式(13),可得电流相角度估计值为:

逆变器功率管开路故障定位是基于电流相角度。根据文献[18,19]研究成果,不同相开路故障其对应的相角度不同。表I列出不同开关管故障下的电流相角度取值范围。

表1 不同相开路故障下电流相角度取值
3 实验
使用MATLAB/Simulink,建立三相六开关逆变器永磁同步电机矢量控制模型,仿真实验验证所提出故障诊断算法的有效性与可行性。仿真参数如下:直流侧电压Udc=310V,调制频率为10KHz,电机参数如表II所示。图2为逆变器正常情况下的仿真结果,实验结果表明滑模观测器估计值可正确估计逆变器电流相角度,此时电流相角度残差较小。图3为当逆变器中Q1功率开关管发生开路故障后的实验结果。此时在两个开关状态下,电流估计值与实际值有明显的变化,电流相电度残差较大且维持时间较长。故障诊断方法能正确检测逆变器A相开路故障。图4为逆变器中不同功率开关管开路故障后电流相角度估计值。实验表明文献所提出的故障诊断方法能正确定位不同相开路故障。图5为当电机负载转速变化时对Q1开路故障诊断的实验结果。结果表明,不同转速下,故障特征值变化极小,表明该故障诊断方法对电机负载转速变化具有强鲁棒性。

图4 Q1和Q3开路故障时电流相角度估计值

图5 Q1开路故障不同转速时电流相角度估计值

表2 永磁同步电机参数

图2 正常时电流相角度实际值与估计值

图3 Q1开路故障时电流相角度实际值与估计值
4 结论
应用于永磁同步电机驱动的逆变器易出现故障导致系统停机,而这将带来经济损失或安全事故。为处理该不可预测故障,提升系统的可靠性,针对永磁同步电机系统非线性、变速、强干扰等特点,文章提出一种强鲁棒故障诊断方法。该故障诊断方法采用滑模观测器估计二维静止坐标系中电流相角度,并以此为故障特征量实现故障诊断。由于滑模观测器对输入干扰等不确定性不敏感,电流相角度对电机负载、速度变化不敏感等特点,文章提出的故障诊断方法具有强鲁棒性特点。文章对故障诊断算法的理论推导与性能评估进行了研究与验证。
[1] S. Yang, D.Xiang,A.Bryant, P. Mawby, L. Ran, P. Tavner. Condition monitoring for device reliability in power electronic converters:A review[J].IEEE Transaction on Power Electronic,2010,25(11):2734-2752.
[2] Potamianos P G, Mitronikas E D,Safacas A N. Open-Circuit Fault Diagnosis for Matrix Converter Drives and Remedial Operation Using Carrier Based Modulation Methods[J].IEEE Transactions on Industrial Electronics,2013,61(1):531-545.
[3] Bin Lu,Santosh K.Sharma.A Literature Review of IGBT Fault Diagnostic and Protection Methods for Power Inverters[J].IEEE transactions on industry applications,2009,45(5):1770-1777.
[4] 安群涛,孙力,孙立志,赵克.三相逆变器开关管故障诊断方法研究进展[J].电工技术学报,2011,(4):135-144.
[5] An Q T,Sun L,Sun L Z. Hardware-circuit-based diagnosis method for open-switch faults in inverters[J].Electronics Letters.2013, 49(17):1089 - 1091.
[6] Shin-Myung J, Jin-Sik P,Hag-Wone K, et al. An MRAS-Based Diagnosis of Open-Circuit Fault in PWM Voltage-Source Inverters for PM Synchronous Motor Drive Systems[J].IEEE Transactions on Power Electronics,2013,28(5):2514-2526.
[7] Shuai S, Wheeler P W,Clare J C, et al. Fault Detection for Modular Multilevel Converters Based on Sliding Mode Observer[J].IEEE Transactions on Power Electronics,2013,28(11):4867-4872.
[8] 王欣,周元钧,马齐爽.基于FFT和专家系统的BLDCM系统故障检测与识别[J].北京航空航天大学学报,2013,39(04):564-568.
[9] 于泳,蒋生成,杨荣峰,王高林,徐殿国.变频器IGBT开路故障诊断方法[J].中国电机工程学报,2011,31(9):30-35.
[10] 付玲,帕孜来·马合木提,廖俊勃.三相SPWM逆变器的智能故障诊断研究[J].制造业自动化.2015(05):72-74.
[11] 李宁,李颖晖,朱喜华,雷洪利,俞佳.新型容错逆变器的混杂系统建模与故障诊断[J].电机与控制学报,2012,16(9):53-58,66.
[12] Salehifar M, Arashloo R S,Moreno-Equilaz J M, et al.Fault Detection and Fault Tolerant Operation of a Five Phase PM Motor Drive Using Adaptive Model Identification Approach[J].IEEE Journal of Emerging and Selected Topics in Power Electronics,2014,2(2):212-223.
[13] Ding X,Poon J,Celanovic I,et al. Fault Detection and Isolation Filters for Three-Phase AC-DC Power Electronics Systems[J]. IEEE Transactions on Circuits and Systems I:Regular Papers,2013, 60(4):1038-1051.
[14] 白晶,卢士祺,刘健.电流源型逆变器滑模控制策略的研究[J].制造业自动化,2014(20):31-34.
[15] 韩邦成,王鹏,陈彦鹏.改进滑模观测器的磁悬浮高速PMSM转子位置预测方法[J].电机与控制学报,2013,(9):42-47,56.
[16] 刘昇,卢广山,徐瑜,等.基于改进型滑模观测器的PMSM无位置控制[J].南京航空航天大学学报,2013(04):474-478.
[17] Nuno M .A. Freire, Jorge O. Estima,António J. Marques Cardoso .Open-Circuit Fault Diagnosis in PMSG Drives for Wind Turbine Applications[J].IEEE Transaction on industrial electronics, 2013,60(9):3957-3967.
[18] Mendes A M S,Cardoso A J M.Voltage source inverter fault diagnosis in variable speed AC drives by the average current Park’s vector approach[A].Proceedings of the IEEE International Electric Machines and Drives Conference,Madison,USA[C].1999: 704-706.
[19] Rivelino Espinoza-Trejo D,Campos-Delgado D U,Bossio G, et al. Fault diagnosis scheme for open-circuit faults in field-oriented control induction motor drives[J].IET Power Electronics,2013, 6(5):869-877.
