物联网的压水堆CRDM故障信息融合方法分析
2015-09-03韩文伟
郭 清,夏 虹,韩文伟
(1.哈尔滨工程大学工程训练中心,150001哈尔滨;2.核安全与仿真技术国防重点学科实验室(哈尔滨工程大学),150001哈尔滨)
核电站自运行以来,国内外时有发生控制棒执行机构失灵的报道[1].2012年中国秦山核电站发生一回路堆芯控制棒滑棒事件,虽及时发现消除了隐患,但对控制棒执行机构的安全状态监测为核工作者们敲响了警铃.核电站的启动、功率调节、通量展平以及紧急事故停堆,均需通过控制棒驱动机构来实 现.控 制 棒 驱 动 机 构[2](control rod drive mehanism,CRDM)是核反应堆压力容器内唯一可动的重要执行机构,其故障主要表现为卡棒、滑棒和落棒[3],其中以落棒故障影响最为严重,甚至能够造成停堆事故.控制棒束掉落堆芯可能是由于一个或几个控制棒驱动机构发生了故障,一旦发生任何一种细微故障征兆,都将对核电站产生不容忽视的安全隐患.
核电行业是具有较强辐射性的高危行业之一,将物联网投入核电产业应用[4],将会极大地增加实时监控的便捷性以及减少核物质对工作人员的伤害.本文将物联网技术应用于无法近距离探测的一回路反应堆安全壳内,搭建物联网CRDM故障识别平台,使用无线传输网络实现在最短时间内将感知到的风险发送到主控室并报警,以达到尽早发现控制棒故障,降低卡棒、滑棒、落棒故障发生的风险概率.
1 核电物联网
物联网[5](internet of things,IoT)是由MIT Auto-ID Center在1999年率先提出,简而言之就是由传感器(物)和互联网一起构成的网络.物联网目前已在矿业、水力、农业、交通、物流等多个领域进入应用,它可以对“物”进行全程跟踪、信息处理和数据融合.物理网连接的不仅是互联网终端,而是“所有物体”,实现了物与物间的信息传递与沟通.与互联网相比,物联网在 anytime、anyone、anywhere的基础上,又拓展到了anything,扩展到了无人以外的机器对机器(即M2M)之间广泛的通信和信息的交流.
从信息融合角度看核动力装置中的各种监测监控信息都具有空间属性.在核电站安全运行期间内多源信息始终处于随时间动态变化的复杂系统中,所探测的实际状态各种数据,如果得不到有效的集成和融合,就会形成彼此之间没有关联的信息孤岛.探测到的多源信息如果得不到有效的综合利用,就不能为核动力装置的安全提供决策依据.物联网的出现,为提供更多有效决策信息的实现提供了可能.
物联网主要体现在有效感知和深入智能分析处理两个方面,尤其适合大面积的核工业领域,对于人类未能探测的地方和区域,提供了方便有力的探测识别信息采集功能,能够实现物物相连的智能化识别和管理.物联网能够将核电站中各种探测传感器、电气机械设备、电缆等整合为一体,为核控人员提供多维空间的多源传感器信息.利用物联网核工作人员可以对安全壳内的堆芯功率复杂环境下的核设备、核仪器实施更加有效的控制和协同管理,物联网的应用为建立核电安全生产和预警故障诊断信息融合提供了新的思路和方法.
2 物联网CRDM故障识别系统
2.1 CRDM物联网框架结构
基于物联网构建的堆芯CRDM故障识别系统框架,如图1所示,按照信息融合处理过程划分为感知信息、传递信息和融合信息3个层次,协同实现堆芯CRDM故障信息征兆的动态实时捕捉,以完成堆芯CRDM故障诊断的预测预警功能.
物联网堆芯CRDM故障识别系统主要采用ARM11 DMA-6410L开发平台、ZigBee通讯装置ZB2530-01无线通讯模块.ARM11 DMA-6410L是采用32 bit的Samsung S3C6410处理器,具有3D及支持动态电压频率调整(即DVFS)及低功耗的存储器界面,采用AXI、AHB和APB总线组成的32 bit内部总线结构界面,处理能力最大可达667 MHz.DMA-6410L开发平台与 ZigBee装置ZB2530-01无线通讯模块连接后,通过UART串列输出输入来交换讯息.其中感知层采用TI公司低功耗单片机MSP430F4270作为无线传感器网络节点的微处理器,MEMS传感器用于检测CRDM电磁信号;网络层由2个无线模块ZB2530实现远距离无线数据传输.采用ARM11核心微处理器与GSM模块连接,用于信号的传递与处理,ARM11微处理器可同时控制读取无线模块ZB2530的SPI总线和与GSM模块通讯的UART总线,支持无线模块ZB2530的无线唤醒方式.
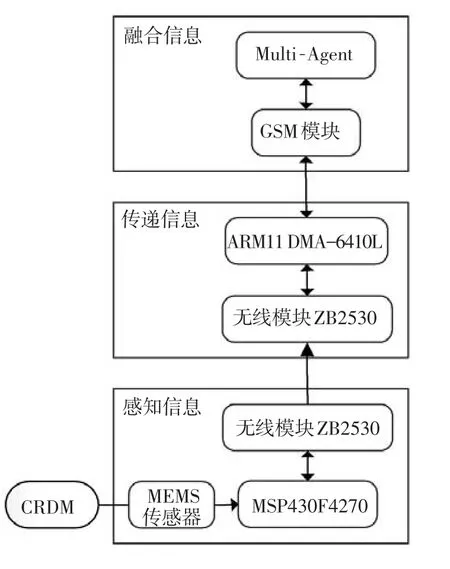
图1 物联网CRDM故障识别系统构成
2.2 感知层——MEMS传感器
微电子机械系统(micro electro mechanical systems,MEMS)是将IC电路与传感元件集成在一起的智能传感器,它能够根据采集到的信息自主地或通过外部指令采取相应动作,具有微型化、智能化、多功能、高集成度等特点.
在压水堆核电站的核反应堆中,控制棒在堆芯中的位置采用间接测量方式[6-10],控制棒位置检测装置是安装在控制棒行程罩壳(承压部件)的外面,根据电磁感应原理使用高精度磁敏传感器,将控制棒的机械位移转换成电信号来监视控制棒在堆芯的实际位置.传感器外部套有同控制棒固定在一起的驱动杆,驱动杆与线圈对应部分的外表面上布置有磁化不锈钢区段.当控制棒上下移动时,驱动杆上磁化不锈钢区段将导致传感器线圈磁路闭合或开路,从而改变每个线圈的感应电动势,每个线圈根据其电动势输出0或1的信息编码.控制棒每移动一步,将使多个线圈的磁路闭合或打开,从而形成唯一的位置信息编码,由位置信息编码便可确定棒位.在控制棒驱动机构内有均匀分布并由非磁隔离物相互隔离的9个线圈,如图2所示,每个线圈周围安装一个MEMS传感器,它由微功耗MCU、磁敏传感器、2.45 GHz数字RF收发器、高温锂亚电池、IP68不锈钢外壳和天线等组成.该传感器每隔设定时间自动测量棒位位移,并将测得的位置数据用无线信号发送输出.每个无线磁敏传感器具有唯一的32 bits编号(ID号),在实际使用时需分配、记录每个MEMS传感器的安装地点,并与编号一起传入网络层.

图2 CRDM内部MEMS传感器分布结构
2.3 网络层——ZigBee无线模块
网络层把智能感知层采集到的数据通过适当可靠的方式传到数据中心,并实现物联网的数据信息与控制信息的双向传输.实现ZigBee通讯装置的是ZB2530-01无线通讯模块,ZB2530-01模块是采用TI最新一代CC2530 ZigBee SoC芯片,该芯片具有良好的无线接收灵敏度和强大的抗干扰能力及自我修复功能,适用于 2.4 GHz、IEEE802.15.4、ZigBee和 RF4CE(遥控解标准和协议)应用.CC2530芯片包含高性能的RF收发器,工业标准增强型8051MCU,系统中可编程的快闪存储器,8 KB RAM以及许多其他功能强大的特性.
基于ZigBee协议的无线传感器网络分簇网关节点的收发数据过程为:Coordinator从串口收到数据自动组网发给所有节点,某个节点从串口收到数据自动发送给Coordinator.其数据传输指令格式为:0xFD(数据传输命令)+0x0A(数据长度)+0x73 0x79(目标地址)+0x01 0x02 0x03 0x04 0x05 0x06 0x07 0x08 0x09 0x10(举例数据)(数据共0x0A Bytes),如图3所示.
2.4 支撑层——Multi-Agent模块
Agent自身属性非常适合解决基于分布式网络的故障监测与诊断问题,Multi-Agent相当于多个“子程序”间的调用,可以完成对数据的收集、处理和融合.Multi-Agent与信息融合有相通之处,Multi-Agent可将来自异构且带有差异的数据信息进行融合,融合结果比单个Agent的决策诊断可信度更高,能够大大提高系统决策结果准确率.
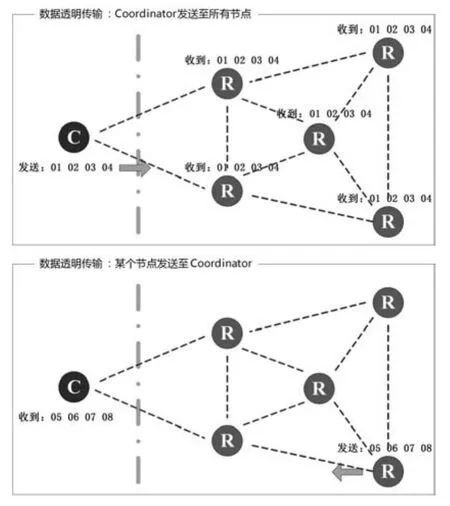
图3 网关节点间收发数据图
Multi-Agent模块由粗糙集Agent和神经网络Agent两个模块构成,神经网络和粗糙集(RS)理论是信息融合中重要的智能信息处理方法,都具有从大量实验数据中获取信息进行推理决策的能力.粗糙集理论不需要任何先验信息和系统模型,能有效处理各种不完备数据,通过数据间潜在的规律,提取到有用的信息,实现信息简化处理.粗糙集方法偏重模拟人类抽象逻辑思维,而神经网络偏重模拟人类形象直觉思维,它俩之间具有很强的互补性.粗糙集Agent主要完成数据简化和数据规则提取功能,CRDM的故障征兆表现在刚开始时具有模糊和不确定性,故障征兆和故障种类间的对应关系不明确,粗糙集理论适合解决此类问题.首先对感知层收集到的含有故障信息的动态数据进行连续属性离散化,并构建离散断点决策表,然后进行属性约简;将得到的简约集传递给神经网络Agent模块,隐含层按照粗糙集Agent简约规则调整权值,直到符合神经网络Agent的目标网络精度为止.
3 验证与分析
田湾核电站机组在不同状态下的运行限值和安全限值(见表1)是机组必须遵守的安全规定.按照田湾核电站控制棒标准[11],设定CRDM控制棒步进距离h为标准值15.88 mm,从单棒的卡棒、滑棒及落棒仿真采集数据中提取15组含有故障信息的动态数据,进行连续属性离散化及归一化处理,如表2所示,其中每组数据包含6种输入特征,分别表示棒位6种位移范围(<0.38 mm,0.38 ~15.88 mm,h,2h,3h,≥3h).
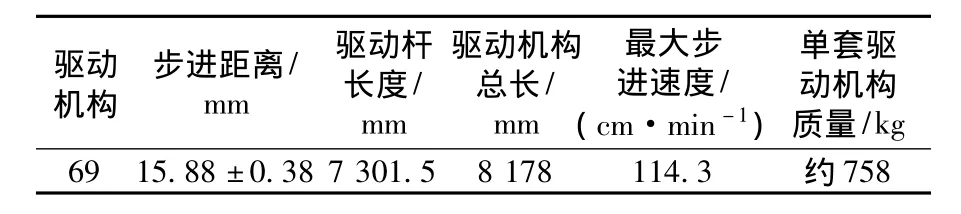
表1 田湾核电站CRDM主要技术参数
粗糙集理论研究中定义信息系统S=(U,C,D),其中:U={x1,x2,…,xn},对象xi(1≤i≤n)表示采集到的故障数据;条件属性C={c1,c2,c3,c4,c5,c6}表示控制棒移动位移大小的隶属程度;决策属性集D={d1,d2,d3}表示CRDM的故障类别,分别代表卡棒、滑棒、落棒3种故障.
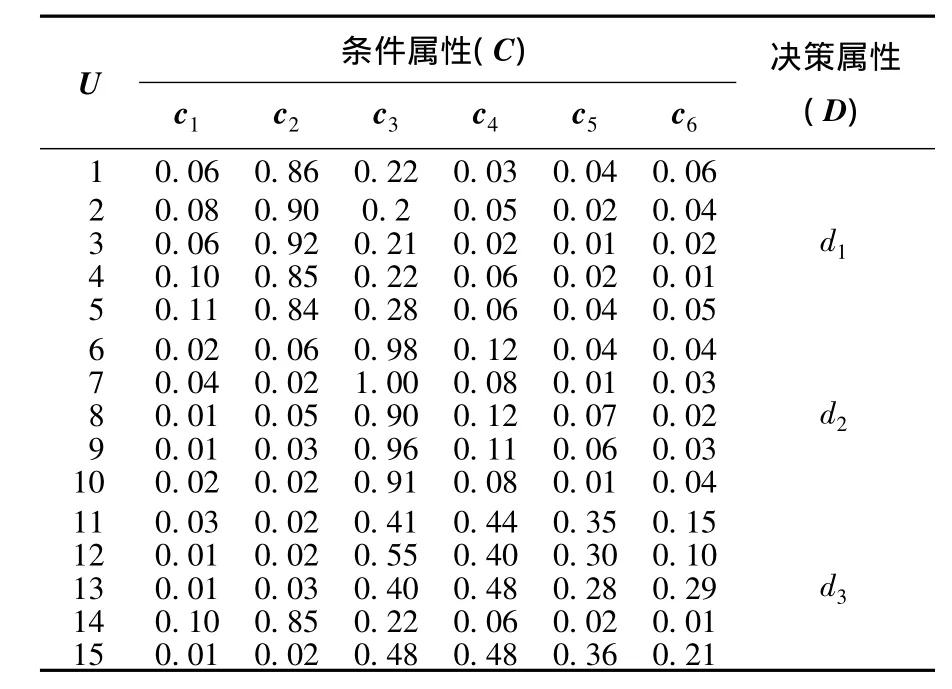
表2 15组CRDM连续属性离散化故障数据
粗糙集理论无法直接使用连续型数据,故进行属性约简前需先对具有连续值特征的属性进行离散化.依据田湾核电站机组在不同状态下的运行限值和安全限值的安全规定,确定各条件属性的离散断点(见表3),整理后得到CRDM故障信息离散化决策表(见表4),简化同一故障种类中的条件属性(见表5).
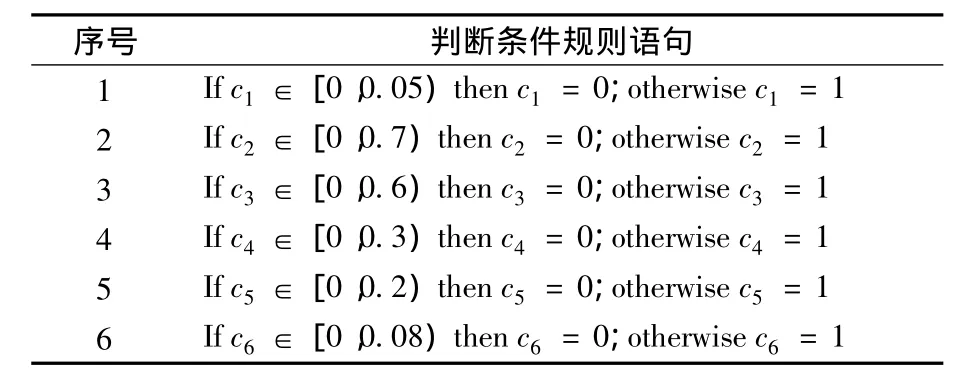
表315组CRDM离散化断点
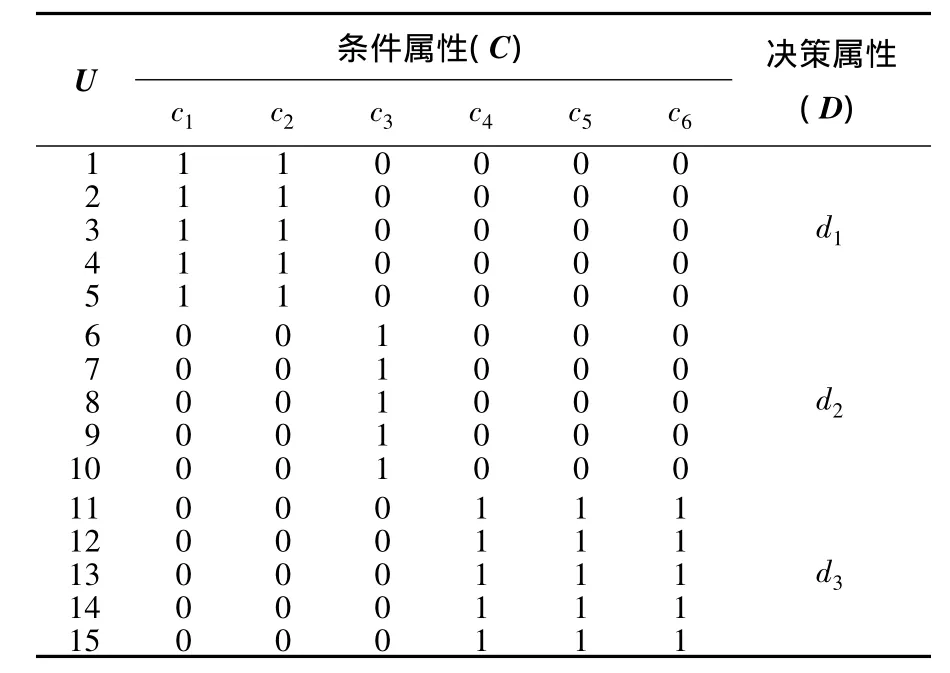
表4 15组CRDM离散化决策表
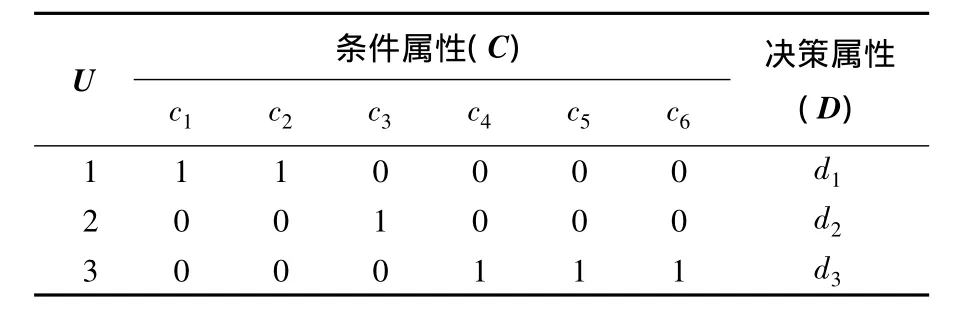
表515组CRDM简化决策表
按照离散化决策表建立分辨矩阵,简化后(见表5)包含3组故障对象,可建立3×3分辨矩阵为
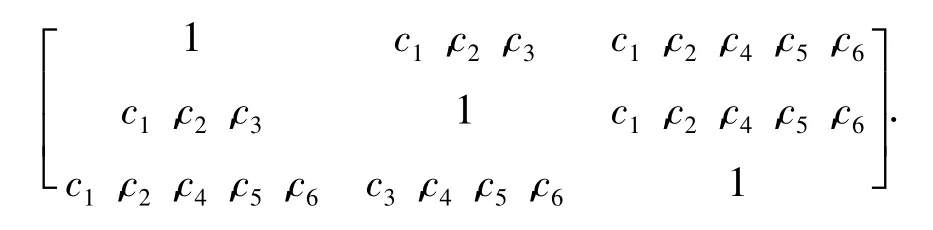
由于故障对象本身无法自我分辨,因此分辨矩阵中该元素以1表示,条件属性c1,c2,c3可分辨故障对象 1 和故障对象 2;c1,c2,c4,c5,c6可分辨故障对象1 和故障对象3;c3,c4,c5,c6可分辨对象2和对象3.
由3×3的分辨矩阵可写出分辨函数,经整理后得到5组属性约简集{c1c3}、{c2c3}、{c3c4}、{c3c5}、{c3c6},将其作为输入层数据送入粗糙集神经网络中,如图4所示.
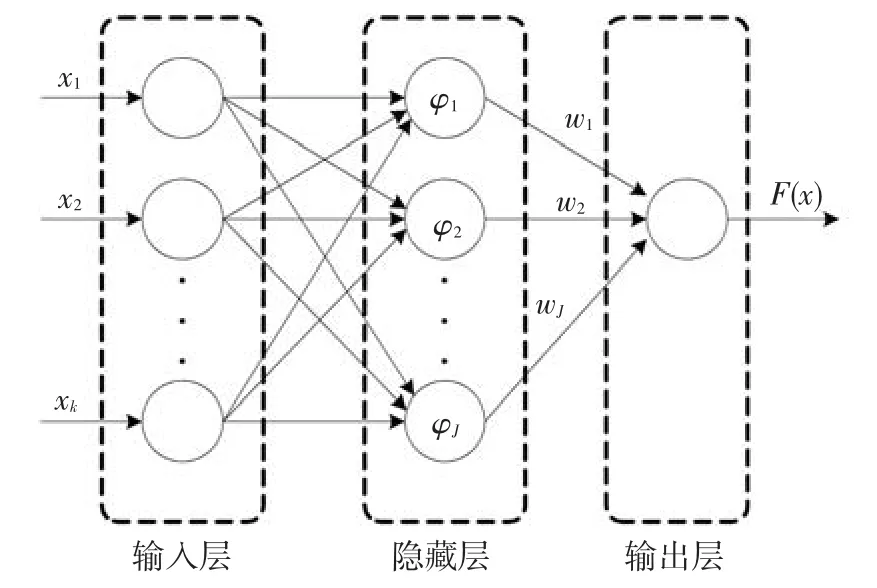
图4 粗糙集神经网络Multi-Agent模块
Multi-Agent诊断模块是多输入单输出的3层粗糙集神经网络,首先对采集到的故障数据进行连续属性离散化,得出决策表;利用粗糙集算法[12-13]对决策表进行约简,消除相同的样本,得出约简决策表;然后将其作为BP神经网络的输入层[14-15].隐藏层的节点数由粗糙集Agent提取规则数确定,隐藏层每个节点代表1条规则,根据提取到的15条规则(见表6)调整神经网络Agent权值和阈值,直到满足网络总误差精度<0.004为止.
为检验粗糙集神经网络融合算法结果的正确与否,将其与实际故障类型进行比较,如表7所示,其诊断结果与实际故障类型相同,正确率为100%,从而验证了物联网支撑层的Multi-Agent模块故障识别结果具有较高的可信度和准确性.

表6 神经网络隐藏层判断规则
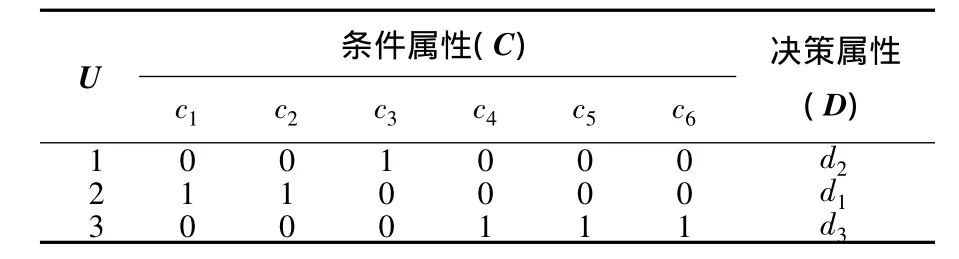
表7 CRDM故障识别结果对比表
4 结论
1)本文主要研究从物联网功能模块构建角度,建立了物联网CRDM故障识别系统,提出以粗糙集神经网络进行决策判断的故障信息融合方法.从物联网感知层、网络层和支撑层角度分别引入MEMS传感器、ZigBee模块和Multi-Agent粗糙集神经网络模块.构建了堆芯CRDM物联网故障识别系统框架,确定了物联网堆芯CDRM故障识别体系结构,其中决策层采用 Agent智能模块——粗糙集神经网络融合算法来完成堆芯CRDM的故障模式识别及预警.
2)为避免MEMS传感器数据量过大带来的神经网络计算速度太慢问题,选取6种输入特征代表棒位位移范围,利用粗糙集理论的不可分辨关系、近似集合和属性约简的概念,将MEMS传感器采集到的实测数据进行约简操作,去除冗余属性得到约简规则,将其作为神经网络Agent模块输入,将粗糙集Agent模块简约规则作为隐含层判断准则,对比神经网络输出结果与实际故障类型,验证了Multi-Agent融合算法具有较高的准确率.实验结果表明与实际故障情况相符,从CRDM故障识别角度证明了使用物联网应用于核动力装置故障诊断的可行性,及粗糙集神经网络融合算法应用于物联网进行信息融合决策的准确性.
3)支撑层Multi-Agent模块是一种智能软体,是物联网发展的关键核心技术,它具有无线的扩展空间,进一步研究采用不同信息融合方法构建不同功能的设备诊断功能Agent模块,对扩展完善基于物联网的核动力装置故障诊断技术具有积极深远的影响.
[1]环境保护部核与辐射安全监管二司,环境保护部核与辐射安全中心.中国核电厂运行事件综合报告[M].北京:中国环境科学出版社,2012.
[2]臧希年.核电厂系统及设备[M].2版.北京:清华大学出版社,2010.
[3]昌正科,董治国,常乐莉.压水堆核电站CRDM故障诊断研究与实践[J].自动化仪表,2013,34(6):58-61.
[4]陈志芳,陈军慧.物联网安防在核设施领域中的应用[J].物联网技术,2013(7):27-30.
[5]ATZORI L,IERA A,MORABITO G.The internet of things:a survey[J]. Computer Networks,2010,54(15):2787-2805.
[6]黄平儿,何攀,何绍群.控制棒驱动机构状态监测与故障诊断技术研究[J].核电子学与探测技术,2013,33(3):338-340.
[7] LEE Jung-Ryul,JEONG Hyomi,KONG Churl-Won.Wave propagation visualization in an experimental model for a control rod drive mechanism assembly[J].Nuclear Engineering and Design,2011,24(9):3761-3767.
[8]周军,曾科龙,刘吉光.反应堆长棒控制系统调试方法研究——逻辑功能验证、CRDM性能试验和落棒试验[J].仪器仪表用户,2013,20(4):34-36.
[9]HONG Ser-Gi,SONG Jae-Seung.A preliminary simulation study of dynamic rod worth for the SMART(Systemintegrated Modular Advanced ReacTor)reactor[J].Annals of Nuclear Energy,2013,60:350-356.
[10]SAIAM M A,SODER M A M,SARDER M A,et al.Measurement of control rod reactivity and shut down margin of 3 MW TRIGA Mark-II research reactor using analogue and digital I&C system[J].Annals of Nuclear Energy,2014,68(6):257-261.
[11]孙汉虹.第三代核电技术 AP1000[M].北京:中国电力出版社,2010.
[12]CHENG Yi.The incremental method for fast computing the rough fuzzy approximations[J].Data & Knowledge Engineering,2011,70(1):84-100.
[13]LIANG Jiye,SHI Zhongzhi.The information entropy,eough entropy and knowledge granulation in rough set theory [J]. InternationalJournalofUncertainty,Fuzziness and Knowledge-Based Systems, 2004,12(1):37-46.
[14]GUO Qing,XIA Hong.Application research on multitarget tracking technology for digital nuclear power plant[J].International Conference on Electrical and Control Engineering,2011(9):1455-1458.
[15]HAM F M,KOSTANIC I.Principles of Neurocomputing for Science& Engineering[M].New York:McGraw-Hill Companies,Inc,2001.