预紧对蠕动式被动箝位压电驱动器性能的影响
2015-09-03曲建俊郭文峰
曲建俊,郭文峰
(哈尔滨工业大学机电工程学院,150001哈尔滨)
压电驱动器在精密加工、精密驱动以及航天工程等领域有广泛的应用前景.根据激励方式,压电驱动器主要分为谐振式和非谐振式.非谐振式压电驱动器主要工作在几十至几百赫兹的声频范围,其特点是运行速度极低,定位精确而且驱动力大[1-2].常见的非谐振压电驱动器主要有压电微位移驱动器、惯性冲击式驱动器和蠕动式压电驱动器,其中,蠕动式压电驱动器具有行程大,运行速度低以及定位精确的特点,受到国内外学者的关注.根据箝位体产生箝位力机理的不同,蠕动式压电驱动器主要分为主动箝位压电驱动器和被动箝位压电驱动器[3-4].主动箝位直线压电驱动器的特点是通电时箝位体对导轨箝位,断电时对导轨放松[5-6];反之,被动箝位直线压电驱动器断电时箝位体对导轨箝位锁紧,通电时对导轨放松,具有无源自锁的特点[7-8].
由于两种类型驱动器箝位力产生机理不同,导致影响驱动力的因素不同.主动箝位驱动器的箝位力由箝位体弹性变形后对导轨箝位产生.箝位体与导轨之间的间隙影响箝位力的大小,间隙越小,箝位力和驱动力越大;反之,箝位力和驱动力越小[9].被动箝位直线压电驱动器的箝位力在装配时由箝位体与导轨间的预紧力决定[10-11].理论上,预紧力越大,箝位体对导轨箝位力越大,驱动力越大;反之,驱动力越小.实际上,驱动力的大小还与箝位体通电时对导轨的放松程度有关,这主要取决于预紧力或预紧状态.目前,许多被动箝位直线压电驱动器为提高箝位体对导轨的放松程度均采用了位移放大结构,如杠杆放大、三角放大和椭圆放大[12-14].由于放大结构具有一定的压缩刚度,在预紧力的作用下将产生压缩变形.即使箝位体对导轨预紧力较大,但箝位体压电叠堆在额定电压下的有效输出位移无法克服压缩变形,导致箝位体对导轨放松程度较小.因此,研究预紧力或预紧状态对驱动器性能影响十分必要.
本文基于已研制的蠕动式被动箝位直线压电驱动器[15],研究其在不同预紧状态下箝位力的大小以及空载特性和负载特性,分析预紧状态或预紧力对驱动器性能的影响.探讨驱动器在一定的预紧力范围内性能随预紧力的变化规律,为预紧力选择提供依据.
1 驱动器结构
前期研制的压电驱动器由驱动箝位体、保持箝位体、驱动体和导轨4部分组成[15],整体结构如图1所示.驱动体为矩形截面薄板结构,压电叠堆通断电时,驱动体沿轴向伸缩变形.箝位体分为驱动箝位体和保持箝位体,两者结构相同,每组采用上下两个三角放大结构,其结构如图2所示.装配时,箝位体对导轨预先施加预紧力.当压电叠堆通断电时,实现对导轨的放松和箝位.
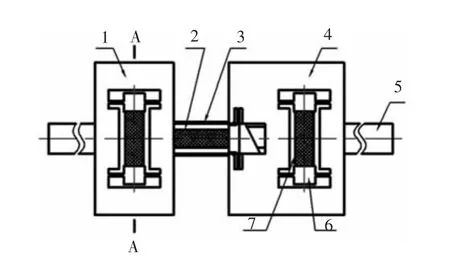
图1 驱动器整体结构俯视图
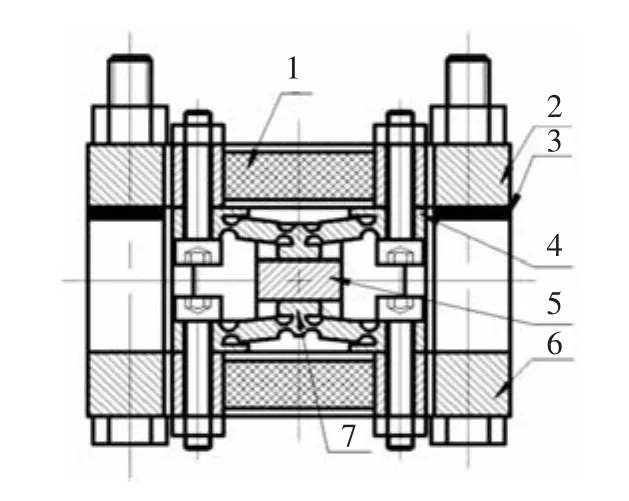
图2 箝位体结构
2 箝位体压缩变形
2.1 实验条件
选用哈尔滨芯明天公司型号为PSt 150/5×5/20压电叠堆,结构尺寸为5 mm×5 mm×18 mm,额定电压为150 V,标称位移为 20μm,等效刚度为60 N/μm.驱动器电源的输出电压为0~150 V可调.驱动器输出位移的测量采用基恩士公司生产的LK-G系列,高速、高精确CCD激光位移传感器,其精确测量位移值为0.1μm.
由于直接测量箝位体与导轨间的箝位力比较困难,本文通过调整预紧状态的方法来改变箝位体与导轨间的预紧力,通过测量箝位体对导轨的箝位保持力来间接评价箝位力的大小.预紧状态调整方法如图2所示,通过改变调整垫片3的厚度,可以改变箝位体与导轨间的预紧状态,从而实现预紧力的调节.箝位保持力测试方法如图3所示,驱动器水平固定于实验台架上,将拉力计一端与导轨连接,水平且缓慢地拖动另一端,使拉力计数值缓慢地增加,直至导轨开始滑动,数值不再增加为止.
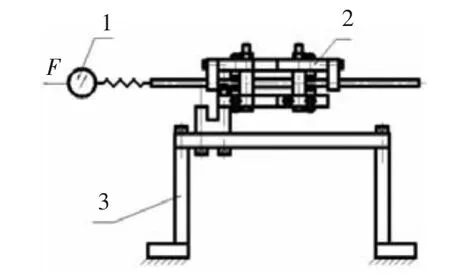
图3 箝位保持力测试方法
2.2 不同预紧状态下箝位保持力
在4种不同预紧状态下测试了驱动箝位体对导轨保持力的大小.实验方法是,驱动箝位体和保持箝位体同时加载相同电压时,测量导轨所承受的箝位保持力.由状态1~状态4,每种预紧状态调整垫片厚度相差0.05 mm且为逐次递减,箝位体对导轨箝位力则逐渐增加.实验结果如图4所示.

图4 不同箝位电压下导轨箝位力
由图4可见,预紧状态1时,箝位体与导轨间的预紧力较小,箝位体压电叠堆在断电状态下,箝位保持力为6 N,箝位电压为额定电压150 V时,箝位保持力接近于0 N,该实验结果表明箝位体在额定电压下可以对导轨接近完全放松.
在预紧状态2和预紧状态3时,箝位体与导轨间的预紧力增加.箝位压电叠堆在断电状态下,箝位体对导轨保持力分别为17.4 N和23.0 N;在额定电压150 V时,导轨仍具有较大的剩余箝位保持力,分别为11.2 N和19.2 N.该实验结果表明,随着预紧力的增加,箝位体在额定电压下对导轨不能完全放松或放松量变小.产生该实验结果的原因是:箝位体三角放大结构具有一定的压缩刚度,在预紧力的作用下产生压缩变形,当变形量大于箝位体压电叠堆有效输出位移时,箝位体不能对导轨完全放松.
当驱动器箝位体处于预紧状态4时,箝位体与导轨间的预紧力将继续增加,箝位压电叠堆在断电状态下,箝位保持力为35 N.虽然箝位体对导轨具有较大的箝位保持力,但较大的预紧力导致箝位体三角放大结构产生的压缩变形量也比较大,随着箝位电压的增加,箝位体对导轨放松程度变小,剩余箝位力较大且不稳定.
2.3 箝位体压缩变形仿真验证
为验证上述实验中箝位体压缩变形的存在,利用ANSYS有限元软件仿真的方法分别对箝位体结构进行正向放大倍数和反向放大倍数分析,以此来证明箝位体在预紧力的作用下产生压缩变形,仿真方法如图5所示.
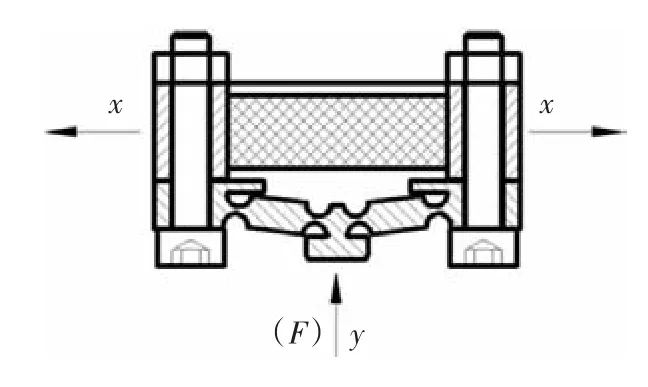
图5 箝位体压缩变形仿真方法
由图5可见,正向放大倍数的仿真方法是在箝位体两侧施加水平位移载荷x,并计算箝位头垂直位移y,根据垂直位移和水平位移的比值计算正向放大倍数;反向放大倍数仿真分析方法是在箝位头处沿垂直方向施加力载荷F,模拟箝位体所承受的预紧力.通过仿真计算得到预紧力作用下,箝位头垂直位移y和水平位移x,根据位移值计算反向放大倍数:

式中:A为箝位体正向(或反向)放大倍数,y为箝位头垂直方向位移,x为箝位两端水平位移载荷.
根据上述方法,得仿真计算位移值如表1所示.
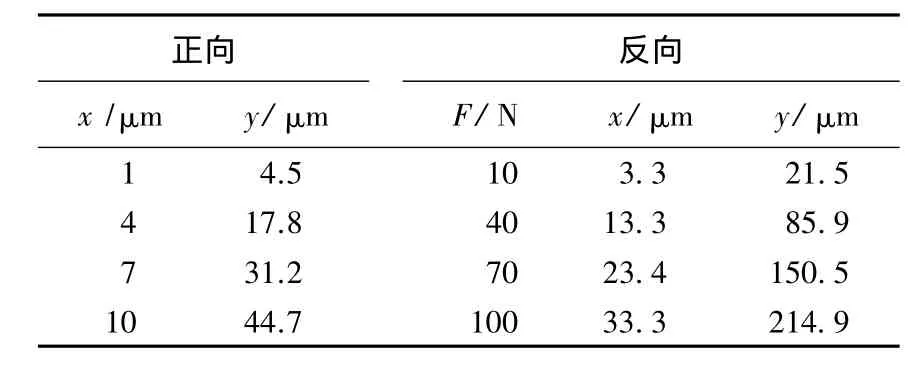
表1 正、反向放大倍数仿真位移值
根据表1仿真数据和式(1)计算得正、反向放大倍数分别为2.23倍和6.45倍.可以看出,箝位体反向放大倍数大于正向放大倍数,表明箝位体两端产生相同水平位移时,箝位头反向运动垂直位移大于正向运动放大时的垂直位移,即箝位体产生了压缩变形,证明了2.2节箝位体保持力实验中产生剩余箝位力的原因.箝位体工作时,箝位压电叠堆有效输出位移需要先克服箝位体产生的压缩变形,然后才能驱动箝位头产生垂直位移.当预紧力较大时,压缩变形量较大,箝位压电叠堆有效输出位移无法完全克服箝位体压缩变形量,导致箝位体对导轨不能完全放松,剩余箝位力较大.
分析导致箝位体压缩变形的主要原因是由于箝位体采用了三角放大结构,结构中直圆柔性铰链为薄弱部分,其刚度较小.在预紧力作用下产生压缩和偏转,宏观上表现为箝位体结构产生压缩变形.
3 驱动器性能实验
3.1 不同预紧状态下空载特性
测试了驱动器在4种不同预紧状态下的空载特性,当驱动体电压和箝位体电压均为额定电压150 V时,实验结果如图6所示.
由图6可见,随着预紧力的增加,驱动器动态响应频率逐渐降低.状态1的最大响应频率可达710 Hz(图中未完全画出),状态2和状态3的最大响应频率均为230 Hz,状态4最大响应频率为190 Hz.每种预紧状态下存在最大运行速度,随着预紧力的增加,相应状态下的最大运行速度及相应的驱动频率降低.预紧状态1时,驱动器最大空载运行速度为1.47 mm/s,驱动频率为130 Hz;预紧状态2和预紧状态3的最大空载运行速度分别为 0.43 mm/s 和 0.34 mm/s,驱动频率分别为70 Hz和110 Hz;预紧状态4时,驱动器空载最大运行速度为0.16 mm/s,驱动频率为70 Hz.
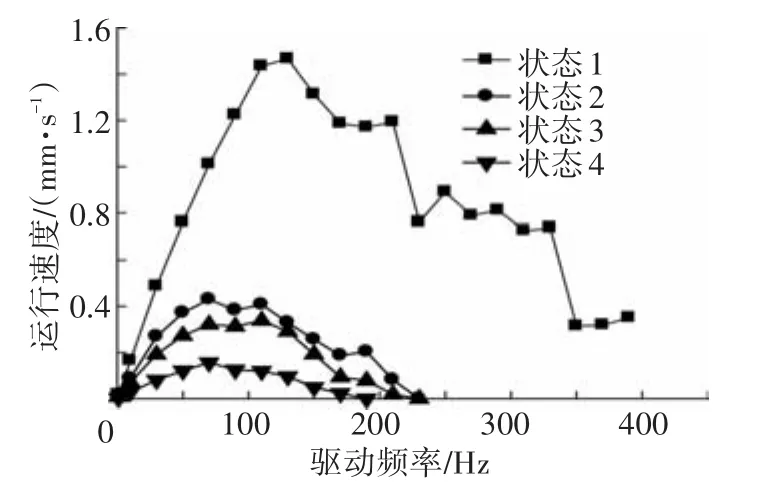
图6 不同预紧状态下驱动器的空载特性
由2.2节箝位保持力实验可知,预紧状态1时,箝位体对导轨剩余箝位力为0,箝位体在额定电压下可以充分地对导轨放松.因此,驱动器在预紧状态1条件下工作时,箝位体与导轨间滑动量较小,驱动器运行速度较高.当箝位体对导轨预紧力增加时,箝位体产生压缩变形,箝位体在额定电压下,无法对导轨完全放松,存在剩余箝位力.驱动器工作时,驱动箝位体和保持箝位体的剩余箝位力互相干涉,导轨与箝位体之间滑动量较大,驱动器运行速度降低.
预紧状态一定时,驱动器空载运行速度随驱动频率的增加呈现先增加后减少的变化趋势,高频驱动时运动速度的变化不稳定.产生上述实验结果的原因是,低频工作时,驱动体可以充分地跟随压电叠堆伸长和复位,驱动体振幅较大,运行速度随驱动频率的增加而提高;当驱动频率较高时,由于金属材料具有阻尼,驱动体在压电叠堆断电时不能完全复位,驱动体振幅随驱动频率的增加而减小,产生振动悬浮现象,驱动器运行速度降低.为验证驱动体振动悬浮,测试了驱动体在驱动电压150 V,1 Hz(10个周期)、50 Hz(100个周期)、110 Hz(150个周期)工作条件下,有效输出位移随驱动频率的变化,实验结果如图7所示.
由图7可见,当驱动频率为1 Hz时,驱动体压电叠堆断电时,驱动体可以随压电叠堆断电而充分地复位,其振幅约为15.3μm;当驱动频率为50 Hz时,驱动体已不能完全复位,驱动体在伸长量大约为8μm处微幅振动,表现为振动悬浮现象,振动幅值也减小,约为2.55μm;当驱动频率进一步增加时,达到110 Hz,振动悬浮现象更加明显,振动幅值也减小为1.7μm.因此,随着驱动频率增加,驱动体表现为有效输出位移降低,驱动器运行速度下降.
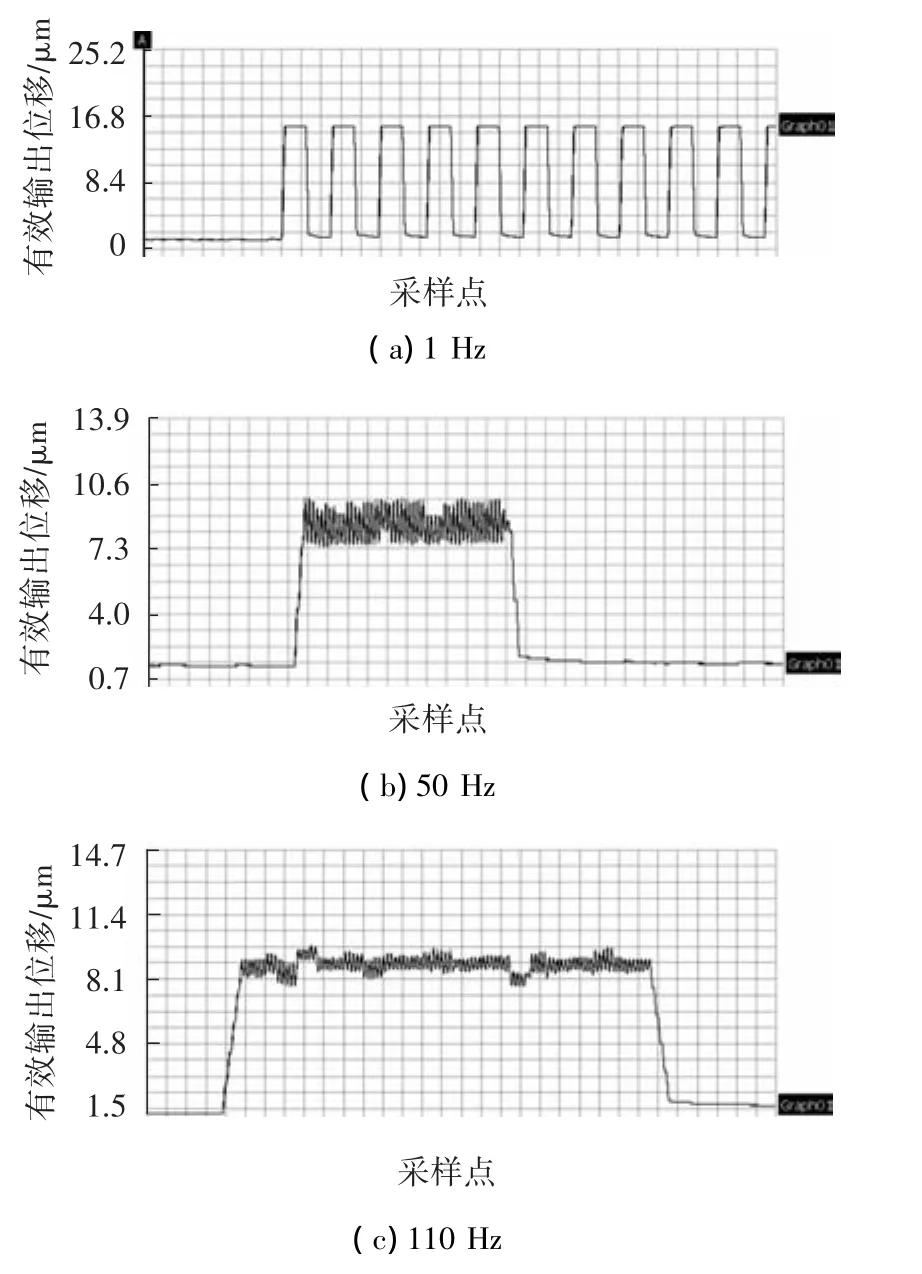
图7 驱动箝位体有效输出位移随频率的变化
3.2 不同预紧状态下负载特性
测试了驱动电压为150 V时,不同预紧状态对驱动器负载特性的影响,实验结果如图8.不同预紧状态下驱动器达到最佳负载特性时的驱动频率不同.预紧力较小(状态1),驱动器在驱动频率为110 Hz时负载特性较好,最大运行速度为1.43 mm/s,最大驱动力为 1.5 N.随着预紧力的增加,在预紧状态2和预紧状态3,驱动频率为50~70 Hz时驱动器负载特性较好,驱动力增至2.1 N,最大运行速度约为 0.3 mm/s.当预紧力继续增加,在预紧状态4时,驱动器性能降低,最大驱动力为1.9 N,最大运行速度仅为0.12 mm/s.
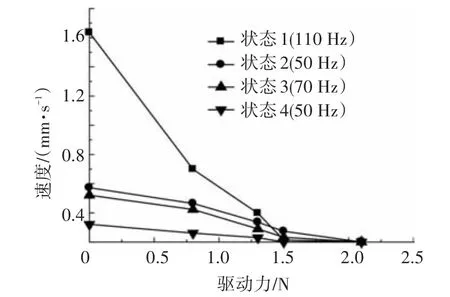
图8 不同预紧状态下驱动器的负载特性
由2.2节箝位保持力实验可知,预紧力较小(状态1)时,箝位体可以对导轨完全放松,导轨运动时与箝位体之间滑动量较小,单步输出位移较大,导轨运行速度较快,但较小的预紧力导致箝位力和驱动力较小.随着预紧力的增加(状态2和状态3),箝位体三角放大结构产生压缩变形,箝位体对导轨放松程度变小,导轨运动时与箝位体之间滑动量增加,运行速度降低,但由于预紧力的增加使得驱动力上升.预紧力过大时(状态4),箝位体三角放大结构的压缩变形量较大,箝位体对导轨放松程度较小,驱动箝位体和保持箝位体的剩余箝位力干涉严重,驱动器性能变差,驱动力变小,运行速度降低.因此,驱动器驱动力的大小与箝位体和导轨间的预紧力相关,合适的预紧力可以使驱动力达到最大值,较大和较小的预紧力均会导致驱动力下降.
3.3 位移时间响应特性
测试了驱动器不同驱动电压下空载连续运动10步位移的时间响应特性,实验结果如图9所示.实验条件为:箝位体在断电状态下双箝位保持力为7.2 N,额定电压下双箝位保持力为0.2 N,该预紧状态与前文预紧状态1较为接近;驱动电压分别为50、100和150 V,驱动频率为1 Hz.
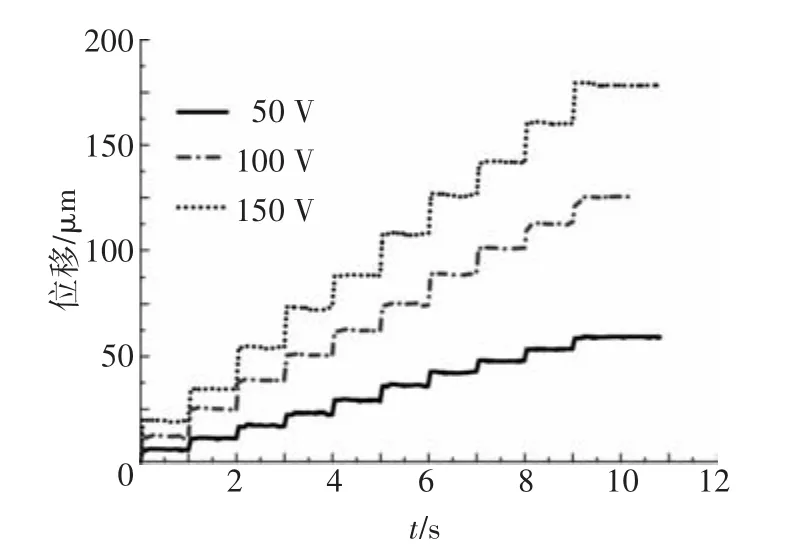
图9 驱动器位移时间响应特性
由图9可见,不同驱动电压下,驱动器有较为稳定的单步位移,随着驱动电压的降低,驱动器单步输出位移逐渐减小.表明驱动器箝位稳定性较好,工作性能稳定,适用于精密驱动等工作环境.
4 结论
1)箝位体三角放大结构在预紧力的作用下产生压缩变形,导致箝位体在额定电压下不能对导轨完全放松.
2)预紧力对驱动器空载特性和负载特性有显著影响.当预紧力较小时,驱动器运行速度较快,但驱动力较小;当预紧力较大时,箝位体间剩余箝位力互相干涉,驱动器性能降低;合适的预紧力可以使驱动器驱动力达到最大值.
[1]赵淳生.超声波电机技术与应用[M].北京:科学出版社,2007:1-2.
[2]张兆成.新型压电尺蠖精密驱动器柔性机构分析与实验研究[D].哈尔滨:哈尔滨工业大学,2010:82-95.
[3] TIMOTHY P G,JEREMY E F,JULIEN B,et al.Design,modeling,and performance of a high force piezoelectric inchworm motor[C]//Proceedings of SPIE.Sam Diego:The International Society for Optical Engineering,1998:756-767.
[4]JEREMY F,GARY H K,CHEN W C,et al.Design and performance of a high force piezoelectric inchworm motor[J].Proceedings of SPIE-The International Society for Optical Engineering,1999,3668(II):717-723.
[5]LI Jun,ZHU Zhenqi.Design of a linear piezomotor with ultra-high stiffness and nanoprecision[J].IEEE/ASME Trans on Mechatronics,2000,4(5):441-443.
[6]刘建芳.压电步进精密驱动器理论及实验研究[D].长春:吉林大学机械学院,2005:32-34.
[7] SULEMAN A,BURNS S,WAECHER D.Design and modeling of an electrostrictive inchworm actuator[J].Mechatronics,2004,14(5):567-586.
[8]JAEHWAN K,LEE J.Self-moving cell linear motor using piezoelectric stack actuators[J].Smart Materials and Structures,2005,14:934-940.
[9]吕超.新型压电步进直线精密驱动器结构的研究[D].长春:吉林大学机械学院,2006:44-45.
[10]LI J,SEDAGHATI R,DARGAHI J,et al.Design and development of a new piezoelectric linear Inchworm actuator[J].Mechatronics,2005:651-680.
[11]MOON C,LEE S,CHUNG J.K.A new fast inchworm type actuator with the robust I/Q heterodyne interferometer feedback[J].Mechatronics,2006(16):105-110.
[12]KIM J,LEE J.Self-moving cell linear motor using piezoelectric stack actuators[J].Smart Materials and Structures,2005,14:934-940.
[13]ZHANG Sheng,HUANG Weiqing,WANG Yin.Research on the S-type linear piezoelectric motor[C]//2012 Symposium on Piezoelectricity,Acoustic Waves and Device Applications.Shanghai:[s.n.],2012:167-170.
[14]潘雷.多足箝位式压电直线电机的研究[D].南京:南京航空航天大学,2012:16-30.
[15]曲建俊,郭文峰,王佳男.被动箝位式压电驱动器:中国,CN 102664554 A[P].2012-09-12.
