GA优化的RBF神经网络外骨骼灵敏度放大控制
2015-09-03杜志江王伟东
龙 亿,杜志江,王伟东
(机器人技术与系统国家重点实验室(哈尔滨工业大学),150001哈尔滨)
穿戴式外骨骼机器人,与人体高度贴合,可增强人体的力量与耐力,缓解人体疲劳.BLEEX下肢外骨骼机器人是由美国加利福利亚Berkeley分校研制的,于2004年进行了样机试验.BLEEX采用液压驱动系统,所有传感器安装在外骨骼机器人上,包括力/力矩传感器、位置码盘等,所提出的控制方法称为灵敏度放大控制(sensitivity amplification control,SAC)[1-2].在SAC 中,灵敏度被定义为外骨骼的输出运动信息与人机交互信息之间的关系,所以如果控制灵敏度在合适范围内,就可以减小人机交互作用,使外骨骼实现高度跟随人体运动轨迹.SAC方法是基于模型的控制,其控制效果取决于系统动态模型的精确程度,而外骨骼机器人是多自由度的非线性系统,要建立其精确的数学模型非常困难[3].神经网络在机器人系统的动力学辨识方面得到了广泛的应用[4-5].如下肢外骨骼的动力学精确模型的建立,一是离线的BP网络训练;二是系统的模式识别.运用BP网络来学习外骨骼的逆模型,网络的输入层为外骨骼关节的运动参数(角度、角速度、角加速度),输出为力矩,采用正模型来获取实验数据,离线学习得到BP网络[6].然而,BP网络每一次学习都需要重新调整权值,收敛速度慢,离线学习得到的BP网络的泛化能力难以得到保证.基于外骨骼单腿的三连杆模型,使用最小二乘法,运用实验手段对外骨骼模型中的参数(如刚度力矩、摩擦力等)进行了辨识[7],但是全部过程需要大量的实验数据,耗时长.
针对外骨骼机器人系统有效地在线学习方法报道很少,本文设计了一种基于遗传算子(GA)优化的径向基函数(RBF)网络在线学习方法,获取外骨骼机器人的动力学模型,并将模型用于SAC中.
1 灵敏度放大控制原理
1.1 灵敏度放大控制的定义
灵敏度放大控制(SAC)是美国Berkley外骨骼系统(BLEEX)采用的控制方法,其控制原理如图1.其中,Ghm是人机交互模型,Gexo是外骨骼的动力学模型,Td是外部干扰力矩,包括人施加的人机作用力以及环境的干扰力,Ta是外骨骼驱动器施加的力矩,q=[q,,]为外骨骼的输出轨迹参数.
由图1可得

定义系统的灵敏度为

S表示外骨骼的输出轨迹对外在力的感应程度,S越大,表示Td对q的影响越大.
考虑人机交互力矩以及机构的阻尼、摩擦等,将图1改写为闭环的形式,如图2所示,其中,Thm是人机交互力矩,Ta是驱动器施加的力矩,α是放大系数,G'exo是外骨骼的逆动力学模型,qhm人体运动轨迹,即是外骨骼的目标运动轨迹.一般地,Ta=(1-α-1)G'exo,那么可以推导出新的灵敏度为


图1 SAC原理

图2 SAC闭环控制
1.2 SAC控制律
外骨骼实体机构如图3所示,每一条腿有两个主动自由度,踝关节不加驱动,驱动部分由液压缸完成.不失一般性,外骨骼机器人的动力学方程可以表示为

其中:M(q)∈R2×2是惯性项,C(q,)∈R2×2是阻尼与摩擦项,G(q)∈R2×1是重力项,T∈R2×1是关节力矩,D∈R2×1为未建模动力学以及干扰项.
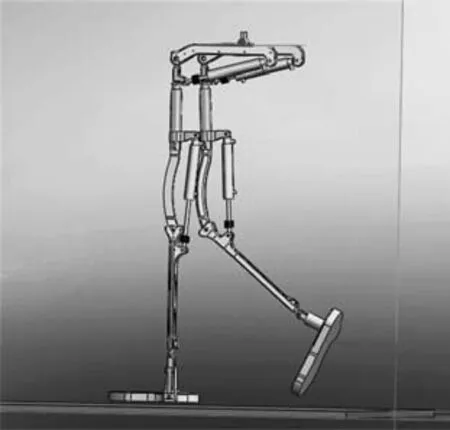
图3 外骨骼机器人模型
在SAC中,设计控制律为[8]

在式(1)中,T=Ta+Thm,可得

式(3)表明,α越大,Thm越小,即是灵敏度增大了,人机交互力矩就会减小,外骨骼的跟随性就会越好.
2 GA优化RBF
RBF的性能很大程度上取决于中心矢量、基宽度参数以及权值,用GA优化RBF结构能够获得较好的性能[9-11].本文权值由设定的算法进行在线更新,在已知输入值范围的条件下,用GA优化出RBF网络最佳的中心矢量与基宽度.
GA优化RBF网络流程见图4.
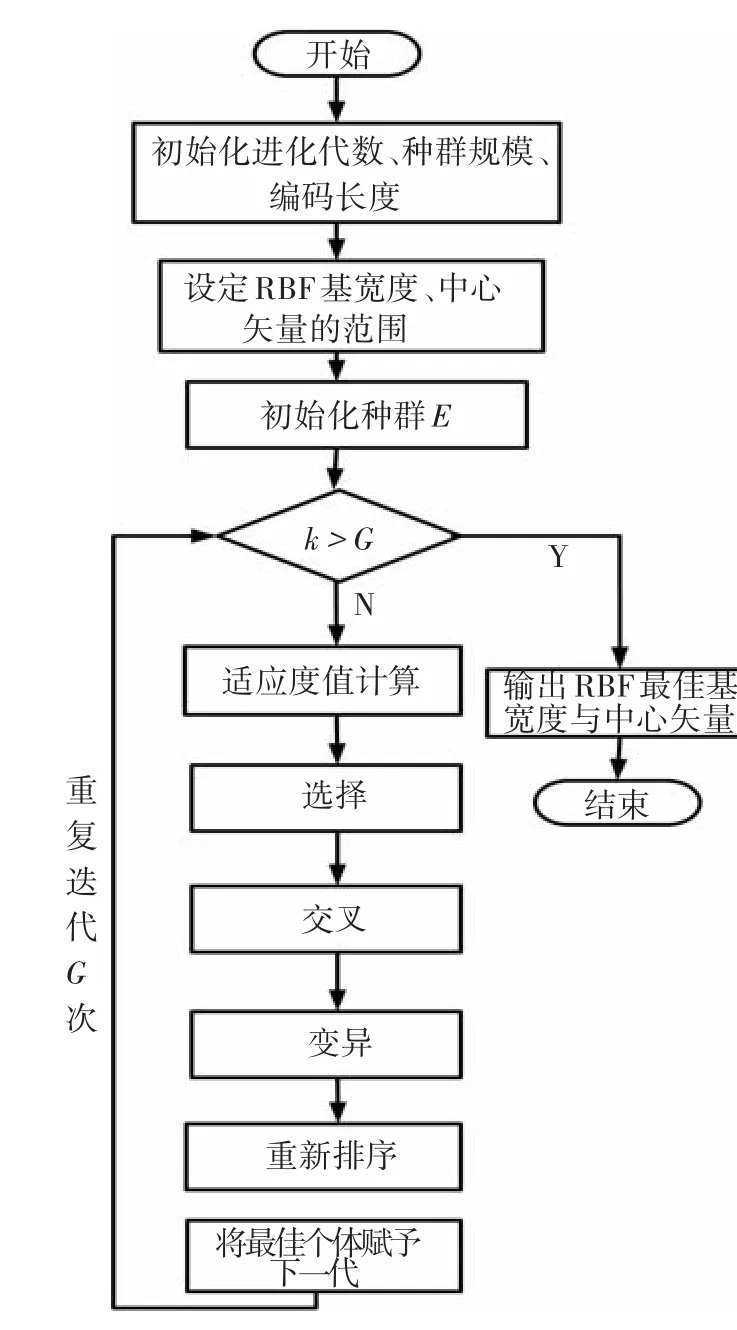
图4 GA优化RBF网络的基本流程
设定进化代为G=250,种群规模为30,编码长度为10.要设计的RBF网络是用来学习外骨骼动力学方程中的矩阵M(q)、C(q,)以及G(q),分别通过GA获得相应的中心矢量

式中:cM、cC、cG为中心矢量,N为隐含层节点数.基宽度可以由下面的经验式获得:

式中:bM、bC、bG为基宽度,cMmax,cCmax,cGmax为中心矢量元素的最大间隔.进行GA优化,得到优化后的 RBF网络的基宽度与中心矢量.对学习M(q)的RBF网络,GA优化RBF网络的结果如图5,迭代到20代左右即可获得最佳个体.

图5 GA优化中心矢量与基宽度的收敛过程
3 RBF在线学习外骨骼动力学模型
外骨骼机器人系统由于其高度的非线性以及外部环境的影响,很难求得精确的动力学模型,借助神经网络的学习能力,构造一种在线学习的RBF网络,可获取更为准确的动力学方程.本文提出了RBF网络在线学习外骨骼动力学模型(1)中的矩阵M(q)、C(q,)以及G(q).在RBF的结构中,输入向量为X=[x1,x2,…,xn],映射到隐含层采用高斯径向基函数

式中:N为隐含层节点数,Hj为jth节点隐含层的输出,bj为jth节点的基宽度,cj为jth节点中心矢量.
外骨骼的动力学模型中,矩阵M(q)、C(q,)以及G(q)是关于关节角度、角速度的矩阵.对于M(q)、C(q,)以及G(q),基于(4)中的中心矢量与基宽度,输入矢量分别为关节角度与角速度的组合,通过高斯径向基函数,可以得到隐含层的输出为

其中,输入矢量分别为

式中:bM(j)、bC(j)、bG(j)分别为jth节点的基宽度,cM(j)、cC(j)、cG(j)分别为jth节点的中心矢量,t是时间变量,学习过程如图6,输入是关节的角度(角速度),经过隐含层的映射,然后与当前时刻的权值相乘,加和后即可得矩阵(q)(q,),(q))输出的元素,每个时刻对权值进行在线更新.
设外骨骼跟随人体轨迹的角度、角速度、角加速度误差为

式中:qh(t)是人体轨迹,q(t)是外骨骼轨迹,定义s(t)(t)+λe(t),其中,λ是正常数,定义等效速度与等效加速度为

式中:κ是正常数.权值的更新是根据实际的轨迹误差以及误差变化率构造的,权值更新的表达式如下[12-13]:
式中:WM-1(j)、WC-1(j)、WG-1(j)为初始权值矩阵,WM(j)、WC(j)、WG(j)是更新后的权值矩阵,η是学习速率.经过RBF网络学习后,网络的输出为

所以,控制律(2)改写为


图6 RBF在线学习动力学模型的M(q)矩阵
控制框图如图7所示.

图7 在线学习动力学方程的SAC控制框图
4 Matlab仿真结果
图3所示的外骨骼主动自由度包括髋关节、膝关节,踝关节为被动自由度.根据临床步态实验[14],一个步态周期内髋关节、膝关节的轨迹如图8,将获得的离散点拟合为时间t的(周期为2 s)方程:

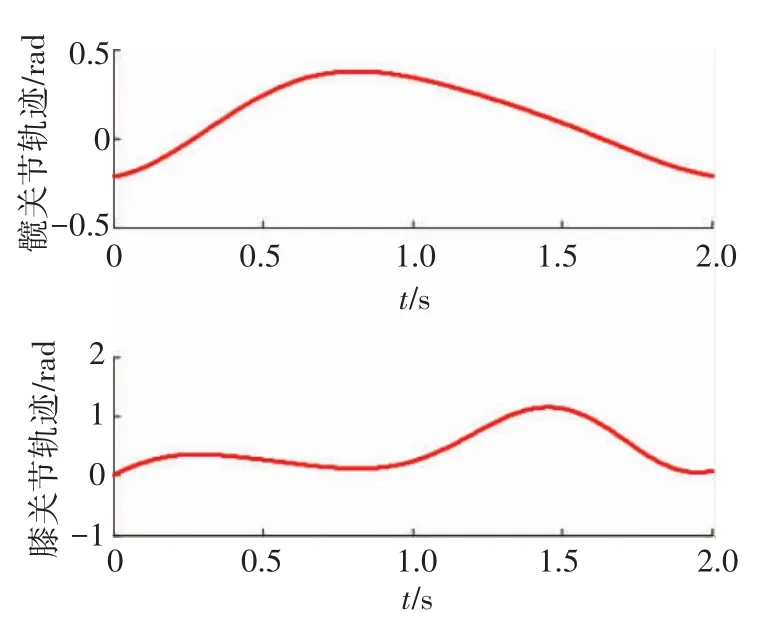
图8 人体临床步态髋关节、膝关节运动轨迹
取采样周期为Ts=0.001 s,0≤t≤2,应用控制律(5),控制外骨骼机器人跟踪(6)所示的曲线,得到的跟随效果如图9.图9表明,外骨骼的关节轨迹与人体的行走轨迹基本吻合,实现了高度地跟随.跟随的误差曲线如图10,可以看出,误差在0的小邻域内变化,基本能够收敛到0.为了说明GA对RBF网络的作用,常规的RBF与优化后的RBF比较结果如图11、12所示.优化后的RBF网络跟踪误差更小,优化后的RBF网络SAC控制使得人机交互信息基本稳定地保持在0的小邻域内,人机交互信息的减小,表明了外骨骼能够高度跟随人体的运动轨迹.

图9 RBF在线学习SAC的人体轨迹跟踪

图10 RBF在线学习SAC的轨迹跟踪误差
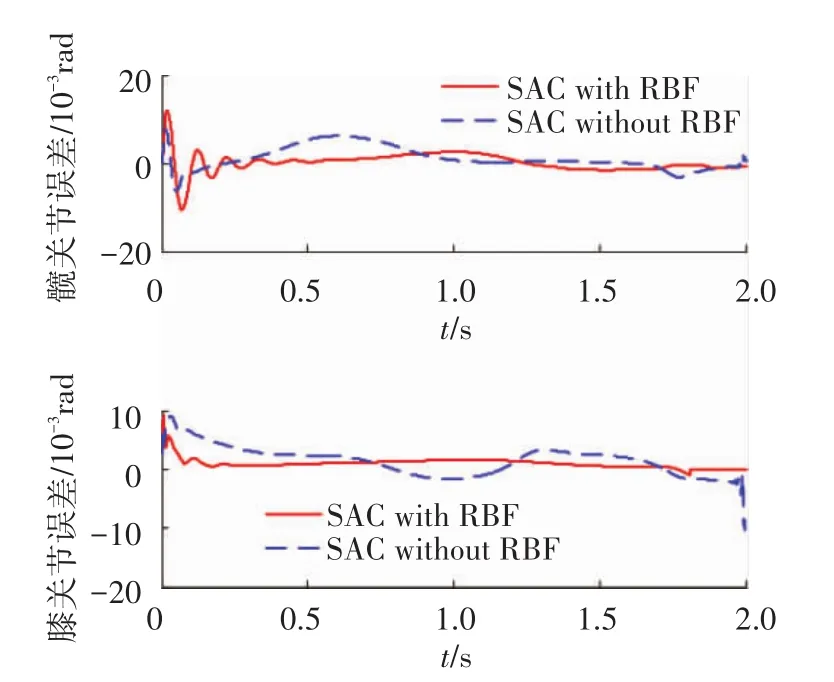
图11 人体轨迹跟踪误差对比曲线

图12 人机交互力矩对比曲线
5 结论
1)利用GA优化出满足适应度函数要求的RBF神经网络最佳中心矢量与基宽度,能够一定程度上改善RBF网络的映射能力.
2)设定的在线RBF学习过程只作权值的更新,通过设定的算法在线计算外骨骼机器人的动力学模型.
3)GA优化的RBF网络与没有优化的RBF网络的SAC控制比较表明,GA优化的RBF网络在跟随人体运动轨迹时有较高的精度以及较小的人机交互力矩.
4)基于GA优化的RBF网络学习外骨骼动力学模型的方法是可行的,实现SAC控制方法精确控制,但实际应用需要试验验证.
[1]KAZEROONI H,STEGER R,HUANG L.Hybrid control of the Berkeley Lower Extremity Exoskeleton(BLEEX)[J].The International Journal of Robotics Research,2006,25(5/6):561-573.
[2]ZOSS A B,KAZEROONI H,CHU Andrew.Biomechanical design oftheBerkeleyLowerExtremityExoskeleton(BLEEX)[J].IEEE/ASME Trans on Mechatronics,2006,11(2):128-138.
[3] GHAN J,STEGER R,KAZEROONI H.Control and system identification for the Berkeley Lower Extremity Exoskeleton(BLEEX)[J].Advanced Robotics,2006,20(9):989-1014.
[4]JIANG Z,ISHIDA T,SUNAWADA M.Neural network aided dynamic parameter identification of robot manipulators[C]//Proceedings of IEEE International Conference on Systems,Man and Cybernetics.Taipei:IEEE,2006:3298-3303.
[5] BIDYADHAR S.DEBASHISHA J.Nonlinear system identification using memetic differential evolution trained neural networks[J].Neurocomputing,2011,74(10):1696-1709.
[6]杨智勇,归丽华,杨秀霞,等.骨骼服神经网络灵敏度放大控制方法[J].吉林大学学报:工学版,2009(3):824-829.
[7] GHAN J,KAZEROONI H.System Identification for the Berkeley Lower Extremity Exoskeleton(BLEEX)[C]//Proceedings of IEEE International Conference on Robotics and Automation.Orlando:IEEE,2006:3477-3484.
[8]杨智勇,张远山,顾文锦,等.骨骼服灵敏度放大控制方法研究[J].计算机仿真,2010(1):177-180.
[9] WANG Hongfa,XU Xinai.Applying RBF neural networks and genetic algorithms to nonlinear system optimization[J].Advanced Materials Research,2012,605-607:2457-2460.
[10]DING Shifei, XU LI, SU Chunyang, et al.An optimizing method of RBF neural network based on genetic algorithm [J]. Neural Computing &Applications,2012,21(2):333-336.
[11]WANG Binli,BAI Guangliang,WEI Zhaolan.Bridge safety evaluation by RBF neural network with genetic algorithm[C]//Proceedings ofIEEE International Conference on Information and Financial Engineering(ICIFE).Chongqing:IEEE,2010:563-566.
[12]GE S S,HANG C C,WOON L C.Adaptive neural network control of robot manipulators in task space[J].IEEE Trans on Industrial Electronics,1997,44(6):746-752.
[13]刘金琨.机器人控制系统的设计与MATLAB仿真[M].北京:清华大学出版社,2008:31-158.
[14]KIRTLEY C.CGA normative gait database[DB/OL].[2014-06-5].http://www.clinicalgaitanalysis.com/data/.
