水面舰艇集体防护系统PID控制分析
2015-09-01芃1吉1剑1锦21中国舰船研究设计中心上海2011082华东理工大学机械与动力工程学院上海200237
林 芃1,王 吉1,包 剑1,李 锦21中国舰船研究设计中心,上海2011082华东理工大学机械与动力工程学院,上海200237
水面舰艇集体防护系统PID控制分析
林芃1,王吉1,包剑1,李锦2
1中国舰船研究设计中心,上海201108
2华东理工大学机械与动力工程学院,上海200237
集体防护系统是水面舰艇防护的重要组成部分。为实现集体防护系统精确的定量控制,基于集体防护区域压力控制方程以及调节机构(超压控制阀)方程,构建系统增量方程线性化传递函数,通过传递函数确定PID参数以实现系统稳定及优化控制。构建系统整体数学模型,结合PID控制模块研究系统变工况特性。模拟结果表明:系统具有良好的超压设定值实现能力及动态特性,能够满足较大的进风量及舱容变化。系统数学模型必须考虑超压控制阀的调节能力限制,过大的送风量可能导致系统无法实现设定的超压值。建立并分析集体防护系统数学模型,为系统向大空间区域工程应用奠定良好的理论基础。
集体防护系统;超压控制;核生化防护;PID控制
0 引言
作为海上作战和事故救援的主要力量,水面舰艇可能随时面临核生化的威胁[1]。舰用核生化集体防护系统(CPS)是实现水面舰艇在核生化环境中执行必要任务的快速、先进、高效的唯一防护手段,具有防护范围广、防护时间长、对人员工作、生活和设备运行影响较小等优势[2],是世界各海军强国水面舰艇先进性的重要衡量指标之一[3-6]。
集体防护区超压控制是系统的核心技术,其功能是保证密闭区域内空气对外超压稳定在一定的范围内,有效防止有毒气体、化学、生物和放射性悬浮物微粒进入集体防护区。从而实现舰员在集体防护区内免受核生化的伤害。超压控制可通过机械式压力泄放阀、超压控制阀、变频风机等压力控制措施实现。目前,我国已具备通过以上控制机构实现有限防护区域超压250~400 Pa,波动范围为控制指标的±20%。与国际先进水平相比,我国集体防护超压控制技术目前为局部区域短时完全防护。对于机舱等大区域,由于气密条件复杂、风量巨大,超压建立及保持非常困难,目前尚未实现有限防护;另一方面,我国集体防护超压控制技术在控制特性上也存在差距。以超压控制阀为例,国际领域已开始采用比例微分积分(PID)的控制方式。目前国内尚未实现超压控制阀的PID控制,对于PID参数量化分析方法的研究并不深入。
本文通过系统数学模型,深入分析集体防护区域、典型控制机构以及优化控制算法。通过传递函数模拟分析系统超压控制特性的能力。为实现集体防护系统压力控制向“大区域、高精度”方向发展奠定良好的理论基础。
1 集体防护区域物理模型(超压控制阀)
图1为采用超压控制阀作为压力控制机构的集体防护区域的物理模型。该系统为单进气/排气环节(超压控制阀)。外部受核生化沾染的空气经模块化滤毒通风装置送入集中式空调器,再由布风器送入舱室。超压控制阀通过调节开度,使集体防护区域的压力维持在设定值。

图1 集体防护区域物理模型Fig.1 PhysicalmodelofCPS
2 集体防护系统数学模型
2.1模型假设
集体防护系统模型将满足以下假设:
1)集体防护区气体为理想气体,舱室体积不变。
2)集体防护区内温度场及压力场分布均匀。
3)外界与集体防护区内温度均设定为295 K。
4)集体防护区外部大气压力设定为1个标准大气压。
5)忽略集体防护区边界漏气量。
6)供气流量保持不变,为设定常数。
7)空气密度保持不变,ρ=1.13 kg/m3。
2.2集体防护区域压力控制方程
集体防护区域质量守恒方程为

式中:MC为集体防护区内空气质量;qK为集体防护区域供气质量流量;qB为超压控制阀排气质量流量。
将集体防护区内空气视为理想气体,理想气体状态方程为

式中:VC,T,PC分别为集体防护区内体积、温度和压力;Rg为空气气体常数。
将式(2)代入式(1),得到集体防护区域压力控制方程

2.3超压控制阀数学模型
采用绝热过程流动方程进行超压控制阀排气流量计算。采用绝热过程亚临界流量公式描述排气环节流动过程[7-8]。
超压控制阀与大气之间排气流量方程为

式中:μB为超压控制阀的流量系数;AB为超压控制阀的等效流通面积;Ph为大气压力。
超压控制阀由伺服电机、减速装置、丝杠及阀盘等组成。实际检测到的超压数值与超压设定值之间的差值作为反馈,输入至电机电路。电机进而根据控制策略改变转速,结合减速装置、丝杠及阀盘调节阀门开度,从而实现设定的超压值。超压控制阀电机反馈控制电气原理图如图2所示。

图2 超压控制阀控制电气原理图Fig.2 Electrical schematic for control of overpressure valve
电枢控制式直流电机电路微分方程为

式中:La为电路中的电感;ia为电流;Ra为电阻;ea为电枢电压;eb为电枢反电势,它的大小与磁通量和角速度的乘积成正比,当磁通量固定不变时,电枢反电势eb可表示为

式中:Ke为电机的反电势常数,其倒数KV为电机速度常数,r/(m in·V);θ为电机轴的角位移。
电动机的力矩平衡方程为


式中:J0为电动机、负载和折合到电动机轴上的传动装置组合的转动惯量,kg·m2;b0为电动机、负载和折合到电动机轴上的传动装置组合的黏性摩擦系数;Tb为负载力矩(包括摩擦力矩);Ta为电动机产生的力矩,对于固定的励磁电流,电动机产生的力矩为

式中:KT为电动机的力矩常数,N·m/A;ia为电枢电流。
用角速度表示电机转角对时间的倒数

联立式(5)~式(10),消去中间变量ia并做拉氏变换,写成传递函数的形式可得[7-9]

本机构中电机电枢中的电感La可忽略不计,TD=0;折合到电机转轴处的负载及由负载引起的转动惯量和摩擦阻尼可忽略,Tb=0。式(11)可简化为

经一阶积分环节表示成电机转角与电枢电压之间的传递函数

超压控制阀的流通面积AB与电机转角的关系为

式中:DB为超压泄放阀等效流通直径;n为丝杠螺距;η为电机—传动机构减速比。设B= πDηn,联立式(13)~式(14)可以写为
B2π

如图3所示,阀盘移动距离L=θη·n,应考2π
虑超压控制阀的最大流通能力,即阀盘与舱壁通孔构成的圆周面积等于舱壁通孔面积,如式(16)所示


图3 阀盘最大流通能力示意图Fig.3Schematicdiagramofthemaxflowcapacityofvalve
2.4PID控制模型
采用PID算法,PID控制模块的输入为检测到的集体防护区超压值与设定超压值的比较结果。输出为电机控制电路中的电枢电压ea,将PID调节过程经拉式变换写成传递函数的形式式(17)~式(18)中,error为检测到的实际超压值DPr与设定超压值DPs的偏差;Kp,Ki,Kd分别为PID调节中的比例、积分、微分参数。

3 系统线性化传递函数
3.1非线性方程线性化
将非线性方程线性化,利用传递函数分析系统的稳定性。方程(3)利用一阶泰勒展开,采用增量方程的形式进行线性化

式中:qB为集体防护区域内压力及超压控制阀流通面积的函数,即qB(PC,AB),将qB进行泰勒展开

式中,下标0表示参考基准值。将式(20)无量纲化后可得

式中:Tcp=VC/RgT(∂qB/∂PC)0;gB=(∂qB/∂AB)0AB,0/ ((∂qB/∂PC)0PC,0);xC=∂PC/PC,0;μB=DAB/AB,0。将电机方程(15)写成增量方程的形式

令μB=DAB(s)/AB,0,μu=Dea(s)/ea,max,C= B·ea,max/AB,0,将式(22)无量纲化可得

将式(23)改写为

式中,ea,0为电枢电压基准值,稳态工况下ea,0=0。
3.2系统增量方程传递函数
利用Matlab-Simulink编制系统增量方程传递函数方块图(图4)。增量方程传递函数不考虑阀盘最大流通能力的限定。
系统开环传递函数为

图4 采用超压控制阀的集体防护系统增量方程传递函数方块图Fig.4Blockdiagramoftransferfunctionofsystemincrementalequations

闭环系统传递函数的特征方程为

系统为4阶系统,根据特征方程可利用赫尔维茨稳定性判据分析系统传递函数的稳定性,确定PID的参数取值范围。
3.3PID参数分析
将系统终值、稳定性、超调量、调整时间等参数作为控制指标,通过调整PID参数进行控制的特性分析。集体防护系统超压值设定为500Pa(相对压力)。图5为比例系数为-5时,450m3集体防护区域内的压力变化。从图5可知,系统调整时间约为65s,系统压力最高值接近700Pa,终值收敛于400Pa,存在100Pa的静态偏差。

图5 比例系数P为-5时集体防护区域压力变化Fig.5 Pressure ofCPSwhile proportionalvalue is-5

图6 比例系数P为-5,积分系数为-0.5时集体防护区域压力变化Fig.6 Pressure ofCPSwhile proportional value is-5,integralvalue is-0.5
为消除静态偏差,引入积分系数。图6是比例系数为-5,积分系数为-0.5时,集体防护系统的压力变化。系统静态偏差消除,但是系统最大压力达到750 Pa,压力振荡较强,稳定时间同样增长,约为190 s。
因此,需引入微分系数D改善系统的动态特性。图7为比例系数为-5,积分系数为-0.5,微分系数为-1时的集体防护区压力变化。系统无静态偏差,50 s系统压力稳定,压力最高值小于700 Pa,系统具有较好的动态特性。
4 系统变工况模拟
确定PID参数后,利用Simulink构建系统数学模型(图8)进行变工况模拟,系统必须考虑超压控制阀的最大流通能力。集体防护系统模拟基准参数:超压值设定为500 Pa,体积为450m3,送风量为5 000 m3/h。

图7 比例系数P为-5,积分系数为-0.5,微分系数为-1时集体防护区域压力变化Fig.7 Pressure of CPSwhile proportional value is-5,integralvalue is-0.5,differential value is-1

图8 集体防护系统数学模型求解模块Fig.8 Simulink block ofmathematic modelof CPS system
4.1超压设定值分析
图9为超压设定为700 Pa时集体防护区域的压力变化。系统约40 s时压力可稳定于700 Pa。实际使用中,超压700 Pa通常不需要,500 Pa即可满足核生化的防护要求,但超压700 Pa的模拟结果表明,超压控制阀及控制策略具有良好的调节能力。图10为超压设定为350 Pa时,系统的压力变化。图11为超压设定值为350 Pa时,超压控制阀流通面积的变化。结合图10与图11,可观察到5~20 s时间段,阀已达到最大的开度,系统压力出现一段调整期。其根本原因是5 000m3/h的进风量与350 Pa的超压指标不匹配,应适当减小进风量或增大超压控制阀的通径。尽管如此,系统最终仍可达到350 Pa的超压设定值。进一步的模拟研究表明,本例所设定的系统参数无法实现250 Pa以内的指标,需适当减小进风量。

t/s图9 超压设定700 Pa时系统压力变化Fig.9 System pressure variationwhile over pressure value is 700 Pa
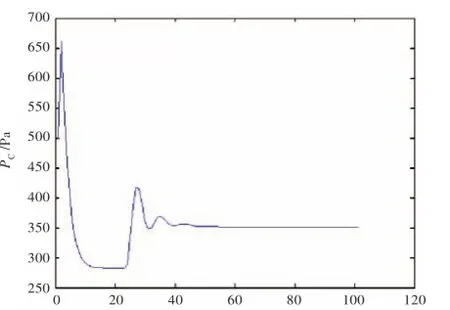
t/s图10 超压设定350 Pa时系统压力变化Fig.10 System pressure variationwhile over pressure value is350 Pa

图11 超压设定值为350 Pa时超压控制阀流通面积变化Fig.11 Flow area variation of control valve while over pressure value is350 Pa
4.2进风量变工况模拟
图12为进风量设定为2 000m3/h时的系统压力变化。系统体积与超压设定值不变。图12表明,进风量为2 000 m3/h时,系统超调量不超过100 Pa,压力经振荡后于60 s后稳定于500 Pa设定值。图13为进风量为6 500m3/h时的系统压力变化,系统压力在阶跃响应下,压力冲高至800 Pa以上,于20 s后稳定于550 Pa压力值。6 500m3/h的进风量超过了超压控制阀的调节能力,阀的开度已达最大值。在舱容不变的情况下,应适当增大阀的流通直径。

图12 进风量2 000m3/h时系统压力变化Fig.12 System pressure variation while flow rate is 2 000 m3/h

图13 进风量6 500m3/h时系统压力变化Fig.13 System pressure variationwhile flow rate is6 500m3/h
4.3舱容适配性分析
图14~图15为不同舱容时压力的变化。当舱容为150m3时,由于空气总量的减小,系统压力具有较大的超调量,最高压力接近800 Pa,随后压力回落并趋于500 Pa稳定。当舱容为1 000m3时,由于空气总量增加,系统超调量减小,约为170 Pa,与此同时,系统压力振荡增加,约120 s后,压力达到500 Pa超压设定值。

图 14舱容150m3时系统压力变化Fig.14 System pressure variation while CPSvolume is 150m3

图15 舱容1 000m3时系统压力变化Fig.15 System pressure variationwhile CPS volume is 1 000m3
5 结论
本文通过建立集体防护区域、控制机构以及控制算法数学模型,分析集体防护系统超压控制动态特性,并优化系统控制策略,得到以下结论:
1)基于系统压力控制方程,控制机构方程和PID控制算法构建系统数学模型,为水面舰船集体防护系统实现量化分析、精确控制以及大区域拓展奠定良好的理论基础。
2)通过非线性方程的线性化,构建增量方程传递函数方块图,分析整定系统PID参数,得到较为合理的比例、积分和微分控制参数。
3)利用确定的PID参数进行系统超压设定值、进风量和舱容变工况模拟,模拟结果表明系统具有良好的动态特性。超压控制阀的流通调节能力在模拟中不能忽视,可利用系统变工况模拟分析调节机构与舱容、控制指标的适配性。
[1]Nonproliferation Foreign Affaris,Defense and Trade Division.Nuclear biological and chemical weapons and missiles:status and trends,RL30699[R].U.S.A:US Congressional Research Service,2005.
[2]刘虹,刘飞,王斌.海上核化生安全威胁与水面舰艇集体防护[J].舰船科学技术,2011,33(7):150-155. LIU Hong,LIU Fei,WANG Bin.Nautical nuclear chemical and biological security threat and collective protection of surface ship[J].Ship Science and Technology,2011,33(7):150-155.
[3]FREDERICK JW,MILLER R E.Weapons structural test firing aboard the USS Arleigh Burke[J].Naval Engineers Journal,1995,107(3):19-34.
[4]DoD Joint Service.Chemical and biological defense program,Fiscal Year(FY)2009 budget estimates [R].U.S.A:US Department of Defense,2008.
[5]包剑,罗雯军,王吉.美国海军水面舰艇核生化防护新发展[J].船海工程,2013,42(4):81-83,88. BAO Jian,LUO Wenjun,WANG Ji.US naval surface ships NBC defense new developments[J].Ship and Ocean Engineering,2013,42(4):81-83,88.
[6]梅建庭,罗一丁.大型水面舰船集体防护体系的构建与作用[J].舰船科学技术,2009,31(5):98-101. MEI Jianting,LUO Yiding.Construct and function on collective protection system of big ship[J].Ship Science and Technology,2009,31(5):98-101.
[7]刘超.大型飞机座舱压力数字控制的仿真技术研究[D].南京:南京航空航天大学,2009.
[8]武艳,张大林.数字电子气动式座舱压力控制系统模型及性能分析[J].南京航空航天大学学报,2008,40(3):324-328. WU Yan,ZHANG Dalin.Modeling and performance analysis of digital electronic-pneumatic cabin pressure control system[J].Journal of Nanjing University of Aeronautics and Astronautics,2008,40(3):324-328.
[9]王显正,莫锦秋,王旭永.控制理论基础[M].北京:科学出版社,2000.
[责任编辑:胡文莉]
PID controlanalysis of surface naval vessel collectivep rotection systems
LIN Peng1,WANG Ji1,BAO Jian1,LIJin2
1 Shanghai Division,China Ship Developmentand Design Center,Shanghai201108,China 2 School of Mechanical and Power Engineering,East China University of Science and Technology,Shanghai 200237,China
The collective protection system is an essential part of surface ship defense.In order to achieve the precise and quantitative control of the system pressure,a full mathematical model is formed based on the system pressure control equation and by adjusting the mechanism equation.The mathematical model is linearized by incremental equations for further transfer function analysis.PID parameters are tested and confirmed to realize stability and optimized control.Themodel is then formed with the PID parameters to test its performance under variable working conditions.The simulation results show that the system pressure successfully reach the desired value,while various flow rates and system volumes can also be satisfied.In particular,the control limitation of the valve must be concerned in this model,as the target value of pressure may not be reached if the flow rate is too high.Overall,the simulation research builds solid fundamentals for future engineering applications of large space collective protection systems.
collective protection system;over pressure control;NBC protection;PID control
U674.7+03.7
A
10.3969/j.issn.1673-3185.2015.04.018
2014-11-26网络出版时间:2015-7-29 9:24:00
中国舰船研究设计中心研发基金资助项目
林芃,男,1984年生,博士,工程师。研究方向:船舶系统。E-mail:w701sh@mail.onine.sh.cn李锦(通信作者),女,1983年生,博士,讲师。研究方向:机械电子。E-mail:lijinme@ecust.edu.cn
