UUV航迹跟踪的双闭环Term inal滑模控制
2015-09-01严浙平段海璞哈尔滨工程大学自动化学院黑龙江哈尔滨150001
严浙平,段海璞哈尔滨工程大学自动化学院,黑龙江哈尔滨150001
UUV航迹跟踪的双闭环Term inal滑模控制
严浙平,段海璞
哈尔滨工程大学自动化学院,黑龙江哈尔滨150001
针对模型参数不确定及存在外界海流扰动情况下全驱型无人水下航行器(UUV)的航迹跟踪问题,提出了一种双闭环Terminal滑模控制方法。首先,为了防止UUV位置和姿态跟踪控制出现超调量过大的问题,在外环中引入位置和姿态负反馈,设计了UUV的参考速度作为镇定UUV位置和姿态跟踪误差的虚拟控制律。然后,在内环中将虚拟控制律作为跟踪目标。考虑到传统滑模控制会出现“抖振”现象,采用Terminal滑模控制方法,在消除“抖振”的同时,使滑模面上的速度跟踪误差在有限时间内收敛到稳态。最后,运用Lyapunov稳定性理论证明了该双闭环Term inal滑模控制系统的稳定性。仿真结果表明,该控制方法能够实现UUV对空间航迹的精确跟踪。
无人水下航行器;双闭环控制;非奇异Term inal滑模控制;Lyapunov稳定性;空间航迹
0 引言
随着近几年科学技术的不断发展,使无人水下航行器(UUV)在海洋资源开发方面获得了越来越多的应用,航迹跟踪在UUV完成水下作业的过程中更是扮演着举足轻重的作用。然而UUV的动力学方程是强耦合、非线性的,水动力系数不易确定且容易受到水下环境(尤其是海流)中各种干扰力的影响,难以获得UUV精确的动力学模型[1],从而设计具有鲁棒性的UUV航迹跟踪控制器就显得尤为重要。
目前关于UUV的航迹跟踪控制,出现了诸如PID、反步、神经网络、模糊等各种控制方法,而其中滑模控制由于对模型的不确定性和未知的外界扰动有着天然的鲁棒性,而且计算过程简单,因此逐渐成为一种被广泛采用的航迹跟踪控制方法。然而,传统滑模控制器中的不连续项会导致“抖振”现象。虽然有人提出在开关面附近引入一个边界层,在边界层内用饱和函数代替符号函数[2-3],进而平滑掉控制器中的不连续项,消除“抖振”现象。但是这将导致边界层内总是存在较大的稳态误差,为了提高边界层内的跟踪特性,必须采用一些自适应策略来补偿不确定项和干扰项。
非奇异的Terminal滑模控制器不仅具有传统滑模控制器的优点,而且克服了它的缺点,即能够有效消除传统滑模控制器中因不连续项所引起的“抖振”问题,从而实现系统的全局渐近稳定。同时,其在传统的线性滑模面中引入非线性项,使得滑模面上的跟踪误差能够在有限时间内收敛到稳态[4-6]。
在UUV的航迹跟踪控制中,实现对期望位置和姿态的精确跟踪至关重要,而传统的UUV位置和姿态跟踪控制过程中常出现控制超调现象。超调量如果过大会导致航迹跟踪偏差急剧增大,甚至无法跟踪上期望航迹。而包含速度负反馈的双闭环系统[7-9]可以很大程度上削弱外界扰动对系统的影响,从而减小系统的超调量,使得系统既能稳定工作,又能精确地跟踪期望航迹。
本文针对在外界扰动和模型参数不确定的情况下,UUV对空间航迹的跟踪控制问题,提出一种双闭环Terminal滑模控制的方法。仿真结果表明,该控制方法能够保证UUV实现对期望航迹的精确跟踪。
1 UUV动力学模型
描述UUV动力学特性必须建立一个包含UUV刚体动力学及其周围流体动力学的合理模型,从而形成UUV的动力学模型。该动力学模型[10]通常在其空间惯性坐标系(E-ξηζ)和运动坐标系(O-xyz)下建立,其向量形式可以表示为:


式中:v=[u v w p q r]T是运动坐标系下的广义速度;η=[x y zφθψ]T是惯性坐标系下的位置和姿态向量;M∈R6×6是惯性矩阵,不仅包括刚体质量,而且包括流体的附加质量;J(η)∈R6×6是惯性坐标系和运动坐标系间的转换矩阵;C(v)∈R6×6是科里奥利向心力矩阵;D(v)∈R6×6是UUV流体阻尼矩阵;g(η)∈R6×1是重力和浮力产生的恢复力(力矩)向量;τd∈R6×1表示外界海流干扰;B∈R6×p是关于推进器推力分配的一个先验常值矩阵,且满足BBT非奇异,p表示推进器的个数;u∈Rp×1表示由各个推进器的推力构成的向量;τ∈R6×1表示各个自由度上所需要的控制输入。UUV动力学模型参数含义的具体说明如表1所示,空间惯性坐标系和运动坐标系如图1所示。

表1 UUV的SNAM E符号表示Tab.1 The SNAM E notation for UUV

图1 UUV惯性坐标系与运动坐标系Fig.1 UUV with inertialand body-fixed reference frames
令M=M^+D M,C(v)=C^(v)+D C(v),D(v)= D^(v)+D D(v),g(η)=g^(η)+D g(η),τd=τ^d+Dτd。其中M^,C^(v),D^(v),g^(η),τ^d为式(2)系数的估计值,D M,D C(v),D D(v),D g(η),Dτd为式(2)系数的估计偏差[6],从而式(2)又可表示为

且ρ=-D M v˙-D C(v)v-D D(v)v-D g(η)-Dτd,||ρ||<bτd
+bg(η)+(bC(v)+bD(v))||v||+bM||v˙||,bτd,bg(η),bC(v),bD(v),bM∈R+。
结合UUV的实际情况,做出如下假设:假设1:参数M满足||M-M^||≤||D M||。假设2:参数C(v)满足||C(v)-C^(v)||≤||D C(v)||。假设3:参数D(v)满足||D(v)-D^(v)||≤||D D(v)||。假设4:参数g(η)满足||g(η)-g^(η)||≤||D g(η)||。假设5:外部海流干扰τd是一个时变的向量。
2 控制器设计
假设6:η和η˙,ηd和η˙d,v和v˙都是有效的。
2.1外环控制器设计
定义线性滑模面如下:

式中:ηe=ηd-η为位姿跟踪误差;ηd表示UUV的期望位姿信息;η表示UUV的实际位姿信息;kI∈R6×6为正定常数对角阵。
设计的内环虚拟控制律[11-12]如下:

式中,ρ为一正常数,饱和函数的定义为

式中,φi为一个正常数,代表在滑模面附近形成的一个很薄的边界层,i=1,…,6。
证明:构造Lyapunov函数

则V1关于时间的导数为

由式(6)可知


因此,可得经过上述证明分析,外环控制系统稳定。
2.2内环控制器设计
定义如下非线性滑模面

式中:速度跟踪误差ve=vref-v;m和n为正奇数,且1<mn<2;kI,kv∈R6×6为正定对角阵。
由式(11),得

结合式(2)、式(3)和式(11),设计控制律且






式中:Ψ∈R6×6为正定对称常值矩阵;a为任意常数。
证明:构造Lyapunov函数

则V2关于时间的导数为

式中,ϑ=mn||kv-1diag(ve(mn-1))M^-1||(bτ+bg(η)+(bC(v)+
dbD(v))||v||+bM||v˙||-||ρ||)>0。
从而可得

对式(21)两边同时积分,可得

从式(22)中可以看出,内环控制器可以保证系统状态渐近收敛到滑模面[2-3]。
由以上分析可知,本文所提出的双闭环控制系统具有稳定性。该双闭环控制系统如图2所示。

图2 双闭环Terminal控制系统框图Fig.2 Block diagram of the double closed-loop Terminal controlsystem
3 仿真实验与分析
设定的期望航迹为

UUV初始位置:(xo,yo,zo)=(-10,7,5)m,初始姿态:(φo,θo,ψo)=(0,0,0)rad,初始航速:(uo,vo,wo)=(0,0,0)m/s,外界扰动为:τd= [30sin(0.01t) 10 sin(0.01t) 10 sin(0.01t) 0 0 0]T。
本文的仿真实验对象为美国的ODIN[13-15],如图3所示。该UUV推进器系统由8个推进器组成,动力学模型参数可参见文献[13]。

图3 ODINUUVFig.3 ODIN UUV
假设推进器产生的推力能够满足需求,且推进器推力与各个自由度上的控制输入满足如下关系

式中:τ=[τuτvτwτpτqτr]T表示作用在UUV重心的控制输入;BT(BBT)-1为矩阵B的广义逆;
u=[u1u2u3u4u5u6u7u8]T表示各个推进器产生的推力。
推进器的推力分配矩阵B定义如下[13]

式中,φ=45o。图4给出了UUV水平方向的推进器(HT)分布概略图。

图4 推进器分布图Fig.4 Thruster distribution
假设系统模型参数存在-10%的偏差且有外界海流扰动,控制器参数设为m=5,n=3,bτ=9.5,bg(η)=1,bC(v)=1,bD(v)=2.2,bM=2.8,
d
kI=400,kv=50,φi=0.02,kl=1.2,Ψi=16,且
i
iii=1,…,6。
为验证本文所设计的控制器在实现UUV航迹跟踪控制方面的优势,在同样仿真实验条件下分别采用改进前的单闭环非奇异Terminal滑模控制器(SCLNTSMC)与改进后的双闭环非奇异Terminal滑模控制器(DCLNTSMC)进行空间航迹跟踪控制,得到仿真结果。图5~图7给出了系统模型参数存在摄动以及有外界扰动的情况下,UUV分别采用SCLNTSMC和DCLNTSMC进行空间航迹跟踪的位姿跟踪曲线和误差曲线以及空间航迹跟踪的效果图。
从图5~图6中可以看出,在2种控制器的作用下,UUV位姿跟踪误差最终均趋近于零,但在本文所设计的控制器作用下,UUV进行期望航迹跟踪的起始阶段波动幅度较小,且调节时间明显减小,从而证明本文所设计的双闭环Terminal滑模控制器有效减小了UUV位姿控制超调的问题,并且保证了位姿跟踪误差收敛时间的有限性。

图5 位置跟踪及误差曲线Fig.5 The position tracking and tracking error curves
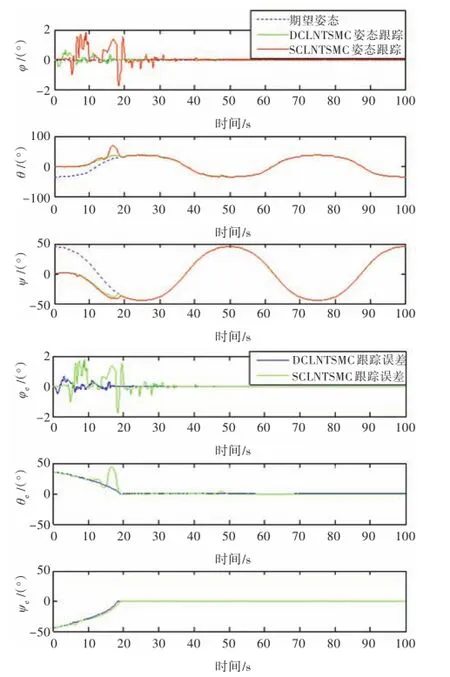
图6 姿态跟踪及误差曲线Fig.6 The orientation tracking and tracking error curves

图7 空间航迹跟踪效果图Fig.7 The spatial trajectory tracking effect picture
图8和图9分别给出了UUV在DCLNTSMC和SCLNTSMC这2种控制器作用下的控制输入以及各个推进器的推力曲线。从图中可以看出,当采用SCLNTSMC时,控制输入在初始阶段波动幅值较大且持续时间较长;而当采用DCLNTSMC时,控制输入波动的幅值明显减小,且持续时间较短。经过上述分析,充分说明了本文所设计的双闭环Terminal滑模航迹跟踪控制器能够成功克服传统滑模控制器中存在的“抖振”问题,实现对UUV的平稳控制。

图8 控制输入Fig.8 The control input
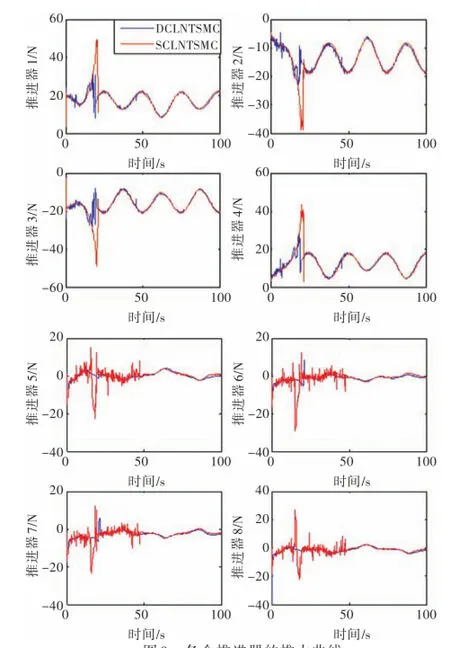
图9 各个推进器的推力曲线Fig.9 The thrust curvesof each propeller
4 结语
针对模型参数不确定和存在外界海流干扰情况下的UUV航迹跟踪问题,为了解决传统控制方法在UUV进行位置和姿态跟踪过程中出现的超调量过大以及“抖振”等问题,引入过程控制的思想,提出了一种双闭环Term inal滑模控制方法。首先,在外环中设计了UUV的参考速度,作为镇定UUV位置和姿态跟踪误差的虚拟控制律,同时将外环中设计的参考速度作为内环中的虚拟跟踪目标,设计了非奇异Terminal滑模控制器。该控制器不仅可以消除传统滑模控制器的“抖振”问题,而且通过在传统线性滑模面内引入非线性项,保证了系统的跟踪误差可以在有限的时间内收敛到稳态。最后通过Matlab软件进行仿真,证明了本文所设计的控制器能够在模型参数不确定及存在外界扰动的情况下,实现UUV对期望航迹的精确跟踪。
[1]贾鹤鸣.基于反步法的欠驱动UUV空间目标跟踪非线性控制方法研究[D].哈尔滨:哈尔滨工程大学,2012:7-12.
[2]BESSAW M,DUTRA M S,KREUZER E.Depth control of remotely operated underwater vehicles using an adaptive fuzzy sliding mode controller[J].Robotics and Autonomous Systems,2008,56(8):670-677.
[3]BESSAA W M,DUTRAB M S,KREUZERC E.An adaptive fuzzy sliding mode ontroller for remotely operated underwater vehicles[J].Robotics and Autonomous Systems,2010,58(1):16-26.
[4]LI J,YANG L.Finite-time terminal sliding mode tracking control for piezoelectric actuators[J].Abstract and Applied Analysis,2014(Supp):1-9.
[5]TANG Y.Term inal slidingmode control for rigid robots [J].Automatica,1998,34(1):51-56.
[6]FENG Y,YU X H,MAN ZH.Non-singular terminal sliding mode controlof rigid manipulators[J].Automatica,2002,38(12):2159-2167.
[7]王敏,杜克林,黄心汉.机器人滑模轨迹跟踪控制研究[J].机器人,2001,23(3):217-221. WANG Min,DU Kelin,HUANG Xinhan.Research on tracking control of robotic sliding mode trajectory [J].Robot,2001,23(3):217-221.
[8]徐亮,边宇枢,宗光华.水下机器人路径控制与仿真[J].北京航空航天大学学报,2005,31(2):162-166. XU Liang,BIAN Yushu,ZONGGuanghua.Path track-ing control and simulation of underwater vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics,2005,31(2):162-166.
[9]吴晓鹏,赵祚喜,张智刚,等.基于双闭环控制的拖拉机车轮转向控制系统设计[C]//2010国际农业工程大会现代农机新技术应用研讨会分会场论文集.上海,2010:11-65.
[10]FOSSEN T I.Handbook of marine craft hydrodynamics and motion control[M].New York:John Wiley and Sons Incorporation,2011.
[11]YU R,ZHU Q,XIA G,et al.Sliding mode tracking control of an underactuated surface vessel[J].Control Theory and Applications,2012,6(3):461-466.
[12]朱齐丹,于瑞亭,夏桂华,等.风浪流干扰及参数不确定欠驱动船舶航迹跟踪的滑模鲁棒控制[J].控制理论与应用,2012,29(7):959-964. ZHU Qidan,YU Ruiting,XIA Guihua,et al.Sliding-mode robust tracking control for underactuated surface vessels with parameter uncertainties and external disturbances[J].Control Theory and Applications,2012,29(7):959-964.
[13]PODDER T K,SARKAR N.Fault-tolerant control of an autonomous underwater vehicle under thruster redundancy[J].Robotics and Autonomous Systems,2001,34(1):39-52.
[14]LIU S Y,WANG D W,POH E K,et al.Nonlinear output feedback controller design for tracking control of ODIN in wave disturbance condition[J].IEEE Oceans,2005,2:1803-1810.
[15]DO K D,JIANG,Z P,PAN J,et al.Global output feedback universal controller for stabilization and tracking of underactuated ODIN-an underwater vehicle[C]//Proceedings of the 41st IEEE Conference on Decision and Control,2002:504-509.
[责任编辑:胡文莉]
A double closed-loop Terminalsliding mode controller for the trajectory tracking of UUV
YAN Zheping,DUAN Haipu College of Automation,Harbin Engineering University,Harbin 150001,China
This paper proposes a double closed-loop Terminal sliding mode control methodology with model parameters uncertainty for the trajectory tracking of fully actuated unmanned underwater vehicles under external current disturbances.Firstly,to prevent the problem of large overshoot during the position and orientation control of UUV,the position and orientation negative feedback is introduced,and the reference velocities are defined in the outer loop,which serves as the virtual control law in stabilizing the tracking errors of position and orientation.With respect to the inner loop,the virtual control law is taken as the tracked target.Considering the undesirable chattering effects of conventional sliding mode control methods,a non-singular Terminal slidingmode controller is adopted,which eliminates the chattering effects as well as ensures the velocities'tracking error on the sliding surface to converge to a steady state within finite time.Finally,the stability of the proposed system is analytically proven using the Lyapunov stability theory,and the simulation results show that the control scheme guarantees precise spatial trajectory tracking of UUV. Key words:Unmanned Underwater Vehic le(UUV);double closed-loop control;non-singular Term inal sliding mode control;Lyapunov stability;spatial trajectory
U644.82
A
10.3969/j.issn.1673-3185.2015.04.017
2014-11-03网络出版时间:2015-7-29 9:24:03
国家自然科学基金资助项目(51179038)
严浙平(通信作者),男,1972年生,教授,博士生导师。研究方向:无人水下航行器(UUV),智能控制。E-mail:yanzheping@hrbeu.edu.cn段海璞,男,1989年生,硕士。研究方向:无人水下航行器(UUV)的轨迹跟踪控制。E-mail:duanhaipu@163.com
