水下航行器水动力噪声分离预报
2015-09-01康1刘国庆1强2张咏鸥1旭11华中科技大学船舶与海洋工程学院湖北武汉4300742中国舰船研究设计中心湖北武汉4300643加州大学圣地亚哥分校机械与航空航天工程系加利福尼亚州圣地亚哥920930411
王 康1,刘国庆1,王 强2,张咏鸥1,3,李 旭11华中科技大学船舶与海洋工程学院,湖北武汉430074 2中国舰船研究设计中心,湖北武汉430064 3加州大学圣地亚哥分校机械与航空航天工程系,加利福尼亚州圣地亚哥92093-0411
水下航行器水动力噪声分离预报
王康1,刘国庆1,王强2,张咏鸥1,3,李旭1
1华中科技大学船舶与海洋工程学院,湖北武汉430074 2中国舰船研究设计中心,湖北武汉430064 3加州大学圣地亚哥分校机械与航空航天工程系,加利福尼亚州圣地亚哥92093-0411
近年来,水下航行器的声隐蔽性受到广泛关注,而有关其水动力噪声的研究却较少。将水动力噪声分为壳体流噪声、壳体流激振动噪声、螺旋桨流噪声和螺旋桨流激振动噪声4类,采用大涡模拟(LES)结合Lighthill声类比混合计算方法,对水下航行器的水动力噪声进行分离预报。首先,采用已有文献数据验证该混合声学计算方法的有效性。随后,对水下航行器壳体和螺旋桨三维流场的流噪声和流激振动噪声进行数值模拟和分析。结果表明,4类噪声均与速度呈非线性关系。在上游段,螺旋桨流激振动噪声为主要噪声;在下游段,壳体流噪声所占比例最大。在低速时,由壳体激发的水动力噪声是主要噪声;随着航速的增大,由螺旋桨激发的水动力噪声占总噪声的比例逐渐增加;总体水动力噪声能量随航速的增大而增大。
水下航行器;大涡模拟;Lighthill声类比;水动力噪声;流噪声;流激振动噪声
0 引言
水下航行器在海洋资源开发等方面起着日益显著的重要作用,作为重要性能指标,水下航行器的声学特性也逐渐为学者所关注,其中,机械噪声和水动力噪声成为水下航行器的致命弱点,可见,低噪声设计至关重要。近年来,许多学者研究了水下航行器的机械噪声并提出了很多有效的降噪方法。然而,有关水动力噪声方面的研究却涉及较少,并且关于水下航行器水动力噪声的数值模拟对航行器的实际设计也有着十分重要的意义。
众所周知,大涡模拟(LargeEddySimulation,LES)[1-2]可以较精确地预测湍流流动,并且对于大规模分离区域的计算,LES也比非稳雷诺平均法更精准。Shur等[3]以LES为基础,在静态和飞行状态下对微型喷气发动机的降噪进行了分析。Cavalieri等[4]利用LES探索了喷气机噪声来源的机理。Zhang等[5]采用LES和FW-H声学类比法模拟了孔腔流动和流激噪声,并将数值结果和CSSRC的实验数据进行比较,证明数值预测方法是有效的。最近,有学者利用LES湍流模型来计算跨过扰流板的平均压力以及作用在上面的波动拖曳阻力,数值模拟的结果与试验值吻合较好。Mak等[6]利用LES湍流模型预测了扰流板输送管的流噪声。张允等[7]基于LES和Lighthill声类比方法,对开孔潜艇流噪声进行数值模拟,发现计算结果与试验结果吻合良好,验证了基于LES的流噪声数值模拟方法可行。江文成[8]利用LES求解潜艇的绕流场,将得到的流场解与试验值进行了的对比,验证了流场计算的准确性。张咏鸥等[9]结合LES和Lighthill声类比理论建立混合计算方法,对类阀空腔模型进行了数值模拟和验证。通过与声学试验对比,证明该流激噪声混合计算方法可行且计算结果可靠,可应用于水动力噪声研究。
本文将水动力噪声分为流噪声和流激振动噪声2大类进行分析,利用LES和Lighthill声类比法对水下航行器的水动力噪声进行数值模拟和分离预报。在计算前,通过已有文献对该方法进行验证,并通过计算选取合适的外流域大小。随后,分别对由壳体导致的湍流流动和由螺旋桨所致的湍流流场进行大涡模拟计算,并在此基础上分别预报壳体流噪声、壳体流激振动噪声、螺旋桨流噪声和螺旋桨流激振动噪声。然后,分别探究这4类噪声的空间辐射指向性及辐射声能量特性等。最后,通过声级计算的方法对4类噪声进行合成计算,分析水下航行器总体水动力噪声的声压分布特性和辐射声能量特性,尤其是探讨这4类噪声对总体水动力噪声的贡献程度。
1 水动力噪声分类及评价指标
1.1水下航行器水动力噪声分类
水下航行器水动力噪声主要包括流噪声和流激振动噪声,前者是指由于湍流脉动压力所产生的噪声,后者是指壁面上的脉动压力激励物面弹性结构引起振动而产生的振动辐射噪声。
水下航行器主要包括航行器壳体、螺旋桨等结构,文中分别对这2部分结构导致的湍流流动引起的水动力噪声进行了分离预报与分析。文中的航行器水动力噪声分为壳体流噪声、壳体流激振动噪声、螺旋桨流噪声和螺旋桨流激振动噪声4类。为便于描述,现假设水下航行器总体水动力噪声为A类噪声,壳体流噪声、壳体流激振动噪声、螺旋桨流噪声和螺旋桨流激振动噪声分别为B类、C类、D类和E类噪声。
1.2评价指标
在声学分析中,常用声压级和声功率级来评判声学特性。声压级的计算公式如式(1)所示,声功率级的计算公式如式(2)所示。


式中:p(f)为f频率下的声压大小;p0为基准声压,在水中,p0=1×10-6Pa;w(f)为f频率下的声功率大小;w0为基准声功率,w0=1×10-12W。
根据噪声测量系统的指定带宽声压级计算公式,假设计算中的频率分辨率为Df,可以给出数值计算中频率为[f0,f1]的声压总级的计算公式,如式(3)所示;声功率总级的计算公式,如式(4)所示。


类似地,水下航行器总体水动力噪声,即A类噪声的声压总级LpA的计算公式如式(5)所示;声功率总级LwA的计算公式如式(6)所示。


式中,LpB,LpC,LpD,LpE,LwB,LwC,LwD和LwE分别为B,C,D和E类噪声的声压总级和声功率总级。
2 模型及计算方法
2.1水下航行器壳体和螺旋桨几何模型
本文研究的水下航行器壳体外形尺寸是在国外某航行器[10]的外形尺寸上进行简化而得,其主要外形和参数如图1所示,头部采用圆头线型[11]。水下航行器采用对转大侧斜螺旋桨,其前、后螺旋桨主要参数如表1所示,几何草图和三维模型图如图2所示。

图1 水下航行器壳体外形简化图Fig.1 The reduced graph of the underwater vehicle hull

表1 对转螺旋桨主要参数Tab.1 The main parameters of the contra-rotating propellers

图2 水下航行器对转螺旋桨几何模型图Fig.2 The geometricmodel figure of the contra-rotating propellers
2.2数值计算方法
对于流噪声预报,利用CFX进行流场模拟,通过Actran中的ICFD模块,将流体计算结果直接导入到Actran中求解流噪声辐射问题,其求解流程如图3所示。ICFD为Actran的流体激励转化模块,首先将流体计算中的声载荷信息通过积分算法整合到声学网格上,得到声学模型的时间历程载荷,再利用其内部的傅立叶变换算法将时间历程载荷转化为频谱载荷,最后利用Actran进行求解。

图3 流噪声预报流程图Fig.3 The flow chart of the prediction for the flow-induced noise
对于流激振动噪声预报,首先利用CFX计算得到三维瞬态流场信息,然后导出壁面上的脉动压力。由于流场网格比结构网格精细,故需将流场壁面处的脉动压力插值到结构网格。本文使用了一套自主编写的插值程序:第1步,在CFX-POST中利用CCL命令导出壁面上的压力文件;第2步,在ANSYS中通过节点查找得到流场壁面网格节点与结构壁面网格节点的插值的映射表;第3步,利用Matlab完成流场壁面网格节点上的压力信息插值至结构网格节点的计算过程;第4步,根据第3步获得的载荷文件,加载至结构进行振动响应计算。最后,将振动响应作为噪声源,在Actran中求解振动声辐射问题,其求解流程图如图4所示。
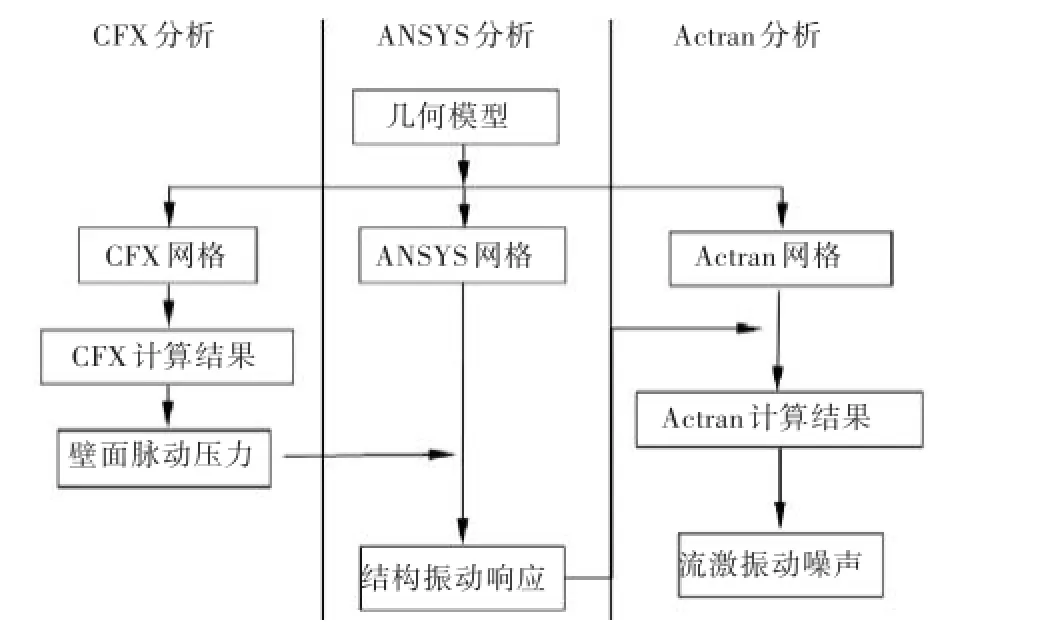
图4 流激振动噪声预报流程图Fig.4 The flow chart of the prediction for the noise from the flow-induced vibration
2.3流场计算模型
水下航行器主要包括航行器壳体、螺旋桨等结构,本文将由这2部分结构引起的水动力噪声分为4类,进行了分离预报与分析。计算壳体导致的噪声时,不考虑螺旋桨的影响;而螺旋桨的流场计算则基于壳体流场计算结果,以壳体流场速度分布作为螺旋桨流场计算的入口边界条件。水下航行器水动力噪声预报是基于外流场信息的,因此外流场的准确模拟至关重要。由于水下航行器整体上为圆柱形,故外流域也采用圆柱形流域,如图5和图6所示,其中D1为壳体外流域径向直径,L1为壳体外流域上游段长度,L2为壳体外流域下游段长度,D2为螺旋桨外流域径向直径,L3为螺旋桨外流域上游段长度,L4为螺旋桨外流域下游段长度。在螺旋桨流场计算中,为了只针对性地分离螺旋桨产生的水动力噪声,计算模型中不包括航行器头部以及翼板,而从航行器平直段开始,并以航行器尾端结束,且进口处采用壳体流场计算结果为速度边界条件。航行器螺旋桨外流域包括静止域和2个绕桨轴旋转的旋转域,即远离螺旋桨的区域为静止域,前桨附近的区域为右旋转域,后桨附近的区域为左旋转域。通过外流域截断计算验证,D1=3D,L2=L4=2L的外流域是满足流噪声预报精度的。由于流激振动噪声主要与壁面脉动压力有关,外流域的大小对其影响不大,因此没有必要研究外流域截断对流激振动噪声的影响。
三维流场采用CFX计算,计算模型及边界设置如图7~图9所示。其中,图8展示了螺旋桨外流域的计算网格,外流域包括静止域和2个绕桨轴旋转的旋转域,由于螺旋桨结构复杂,对旋转域采用四面体网格划分,对静止域采用六面体网格划分。对流场计算模型的边界条件设置如下:圆柱形外流域曲面定义为滑移面,壳体外及螺旋桨表面定义为无滑移面,进口边界为速度边界条件,出口边界为压力边界条件(0 Pa)。其中,对于壳体流场,进口速度如表2所示航速;对于螺旋桨流场,进口速度采用壳体流场稳态计算结果对应位置处的速度分布(如图9给出的是航速为15 kn下该位置处的速度分布云图),旋转域和静止域之间由转子/定子交界面连接。湍流模拟采用LES,其中亚格子应力模型采用LESWALE,对流项采用中心差分格式进行逼近,计算时间步长为5×10-4s,前、后桨转速如表2所示。根据进速系数J的计算公式:J=VA/(nD)计算可得,如此设置时,各工况下螺旋桨的进速系数J基本相同。鉴于缺少模型自航状态下的数据,本文通过保证进速系数相等来作为不同工况航速和螺旋桨转速的选择标准。待计算稳定后(大致10 000步以上)结果均保存1 000步,以便进行流场瞬态分析及流噪声、流激振动噪声的模拟预报。由于是基于步长为5×10-4s的连续1 000步流场信息来预报流噪声和流激振动噪声,所以根据采样频率及采样定理,转换得到的流场信息频域分辨率为2Hz,带宽为1 000 Hz,由此预报得到的噪声精度为2 Hz,最高频率为1 000 Hz。

图5 水下航行器壳体外流域图Fig.5 The graph of the external flow domain of the hull

图6 水下航行器对转螺旋桨外流域图Fig.6 The external flow domain of the propellers

图7 水下航行器壳体外流场计算模型及边界Fig.7 The calculationmodeland boundary of the external flow field of the hull
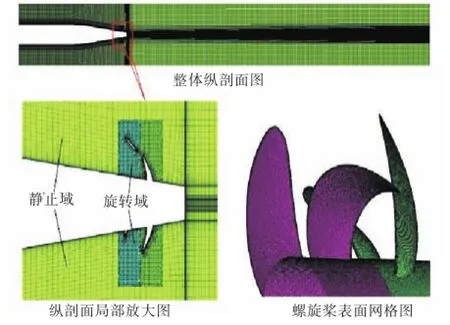
图8 水下航行器螺旋桨外流场计算网格剖面图Fig.8 The sectional view of the calculation mesh of the external flow field of the propellers

图9 水下航行器螺旋桨外流场计算模型及边界Fig.9 The calculationmodel and boundary of the external flow field of the propellers

表2 计算航速以及对应的前后桨转速Tab.2 The calculation velocity and the corresponding rotating velocitiesof the frontand rear propellers
2.4声场计算模型
流噪声数值模拟计算模型及边界条件如图10所示,计算域由2部分组成:声源域(深色区域)和传播域(浅色区域)。计算中,将传播域对应的有限元网格外表面作为无限元基面,壳体表面默认为隔声面,噪声不向航行器内腔传播,而只向“远场”传播。

图10 流噪声声学计算模型设置示意图Fig.10 The modelof the acoustics of the flow-induced noise
流激振动噪声计算模型及边界条件如图11所示,计算域只有传播域(浅色区域),壳体表面设置为边界声源面,且为隔声面,其他设置与流噪声预报相同。
将流场网格信息插值到声场网格时,要求流场和声场的几何结构在空间中的位置信息一致,其中径向插值阶数为8。而航行器螺旋桨三维流场信息模拟计算中有旋转域,即螺旋桨等几何结构的空间位置信息随时间变化,导致旋转域中的流场信息无法插值到声场网格作为声源信息。因此,对于D类噪声的预报,声源域只包含静止域;对E类噪声的预报,激励源只包含静止域中的壳体壁面脉动压力,这些处理方案可能导致螺旋桨噪声预报结果与实际相比偏小。

图11 流激振动噪声计算模型设置示意图Fig.11 The modelof the acoustics of the noise of flow-induced vibration
3 预报方法验证
本文流噪声的预报是应用LES方法对三维流场进行瞬态数值模拟,然后基于Lighthill广义方程对全流场的物理量进行积分而获得远场声压。本文在前期研究[12-13]的基础上,对研究数据较丰富的“大青花鱼”简化潜艇模型进行三维流场及流噪声预报,并与孟堃宇[14]研究的数据进行对比分析,以此探讨Actran预报流噪声的准确性,得到不同预报方法下x方向和z方向声压总级变化特性对比(图12),其中,模型总长l=3.2m,型宽b=0.4m。在这几种预报方法下,流噪声的辐射特性基本一致,但由于艇体近场为声源区,近场的声压都存在着一定的差别,而当与艇体距离不断增大时,由3种预报方法得到声压总级基本趋于一致,其中Actran与Sysnoise的计算结果在艇体远处具有更好的吻合度。因此,本文采用Actran预报流噪声的辐射特性是可行的。


图12 不同预报方法下x方向和z方向声压总级变化特性对比Fig.12 The comparison of the totalsound pressure levels in x-axisand z-axis directions with different methods
4 结果和分析
4.1模态分析
流激振动噪声涉及流场、结构、声场之间的相互耦合,实际上,难以完整地模拟出三者之间的影响规律,由于本文的研究均在低马赫数状态,因此,为简化研究模型,对于流激振动噪声的预报采用单向耦合方法进行,如图4所示。在计算三维动态流场时,将航行器壳体当做刚体处理,不考虑结构振动对流场的影响,也忽略声场对流场的反馈作用,由此得到壳体壁面上的脉动压力信息。
航行器壳体结构如图1所示,忽略壳体加筋等结构,将壳体简化为均匀板厚,材质取为钢,材料属性如表3所示。在结构振动计算中,壳体采用壳单元shell 63,翼板采用体单元solid 45,总单元数为5 171个,总节点数为5 482个。本文是在频域上加载脉动压力进行谐响应分析而得到振动响应信息,因此对航行器结构均可以采用自由边界约束,结构阻尼设为0.002。

表3 钢的材料属性Tab.3 Properties of steel
模态分析用于分析结构的振动特性,即确定结构的固有频率和振型是谐响应分析等动力学分析的基础,本文基于谐响应分析来研究流激振动响应,故有必要先对壳体结构进行模态分析。将壳体厚度t取为10mm,在自由边界约束状态下,计算航行器壳体结构的固有频率。经计算可知,在10~1 000 Hz范围内,壳体结构共有15阶模态,其中包括整体模态和局部模态,航行器壳体结构的固有频率将在后文中进行说明(表4)。

表4 C类噪声声功率级峰值频率与共振固有频率Tab.4 Peak frequency of sound power leveland resonance natural frequency of noise C
4.2声功率级频谱特性分析
提取无限元基面上的声功率数据,得到水下航行器4类噪声声功率级频谱曲线(图13)。对于4类噪声,声功率级均随航速的增大而增大。对于B类和D类噪声,声功率级主要集中在低频范围,随频率的增大而减小,当频率超出该频段后,声功率级很小且在某一定值左右波动。各航速下,B类噪声声功率级出现了1个峰值,而D类噪声声功率级则出现了2个峰值。

分析可知,B类噪声声功率级峰值是由壳体流场的脉动压力峰值所致,而D类噪声声功率级峰值与螺旋桨叶片通过频率有关,第1个峰值频率接近螺旋桨的2阶叶片通过频率,第2个峰值接近螺旋桨(尤其是前桨)的10阶叶频通过频率。峰值频率均随航速的增大而增大。对于C类和E类噪声,声功率级并非主要集中在低频段,而是在整个频段内出现了若干个峰值点,这些峰值是由压力脉动引起结构发生共振所致。但E类噪声的峰值不是特别明显,其峰值量级与声功率级频谱自身的波动量级相差不大,即螺旋桨流场中壳体壁面上的压力脉动未导致航行器结构的明显共振,即共振对E类噪声能量不会有太大的贡献。
表4给出了C类噪声声功率级峰值频率与结构固有频率的对比。不难发现,除第1个峰值外,其他峰值均是由于结构发生共振所引起,而第2个峰值频率与B类噪声的峰值频率相同,由此可以说明第1个峰值是由壳体流场中壁面脉动压力峰值所致。
表5给出了C类噪声声功率级峰值。在6,12 kn航速下,第1个峰值频率处的声功率级基本上要高于其他所有峰值,而在9 kn航速下以700Hz处最大,15 kn航速下318 Hz处的声功率级与第1个峰值基本相同。由此可以得出结论:航速为6,12 kn时,由流场自身的压力脉动峰值引起的流激噪声能量是C类噪声的主要来源;航速为9 kn时,结构共振引起的流激振动噪声能量是C类噪声的主要来源;航速为15 kn时,两者均是C类噪声的主要来源。
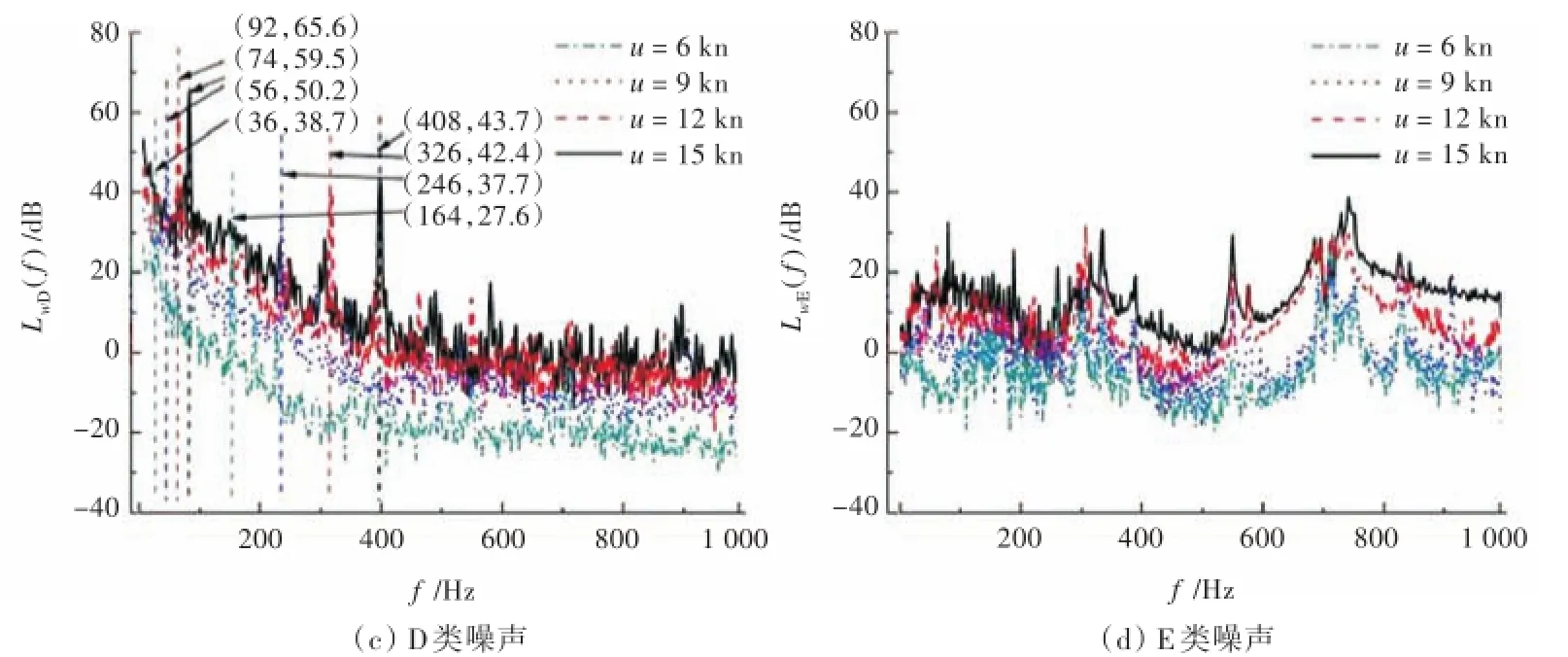
图13 水下航行器4类噪声声功率级频谱曲线Fig.13 Spectrum curves of sound power levelof the four kinds of noises
4.3声压云图分析
在水下航行器水动力噪声预报中,取z=0的xy声学场平面处的云图,该云图区域大小为20 m×20m,中心点坐标为(0.5L,0,0),以便从全局上认识主要噪声源分布、辐射指向性等规律。这里只以航速为15 kn时为例,图14~图15给出了B类和C类噪声的声压级云图。
对于B类噪声,存在某一频率值,低于该频率时噪声源分布在整个流场,高于该频率时噪声源主要分布在航行器头部及尾部翼板处,尤其是翼板处。尾流低频噪声源与翼板处噪声源向空间辐射时,在翼板附近尾流段(距翼板约2L范围内)会相互干涉叠加而形成较低或较高的声压区。由于噪声源分布不同,声辐射云图也相应不同,在低于该频率时没有明显的横向对称特性,而高于该频率时显示出明显的横向对称特性。B类噪声声压级随偏离航行器距离的增大而减小,且横向声压级要高于轴向也即首尾部分。
对于C类噪声,声压级分布关于纵轴有着明显的对称性,其随偏离航行器距离的增大而减小,且横向声压级要高于轴向也即首尾部分。由共振引起的声压级峰值频率下的噪声源分布与结构的振型有关,即噪声源的分布部位和模态分析中有着较大位移响应的部位是一致的。该规律对流激振动噪声试验研究中传感器的布点非常具有指导意义,试验前,只需对结构进行模态分析得到位移响应分布图,就可知道流激振动噪声源可能的分布部位。对于这些部位,应该在试验中进行合理的传感器布点。

表5 不同航速下C类噪声声功率级峰值Tab.5 Peaks of sound power level of noise C in different velocities

图14 B类噪声xy平面声压级云图(u=15 kn)Fig.14 Sound pressure level contours of noise B in xy plane(u=15 kn)

图15 C类噪声xy平面声压级云图(u=15 kn)Fig.15 Sound pressure level contours of noise C in xy plane(u=15 kn)
4.4噪声能量分析
在水下航行器水动力噪声预报中设置一些水听器,以便认识声场中各点的声压大小以及声压分布状态。x方向上均匀设置了15个水听器(图16),水听器与航行器纵轴(x轴)之间距离均为4D,相邻水听器之间的距离为0.5L。

图16 水下航行器水动力噪声预报中x方向水听器位置示意图Fig.16 The schematic diagram of the hydrophones in x-axis direction in noise prediction
根据式(3)计算各航速下的4类噪声在x方向水听器处的声压总级,然后按照式(5)进行合成处理,获得A类噪声在x方向的声压总级,绘制各类噪声声压总级在x方向上的变化规律图(图17)。
由图17可知,B类和D类噪声的声压总级均在X9处最大,C类在X8处最大,而E类噪声在X7处最大,这说明B类和D类两类噪声的主要声源位于水下航行器尾部,C类位于航行器中部,而E类则位于水下航行器前半部分。总体水动力噪声即A类噪声的声压总级在X9处最大。
从图17可以看出,C类和E类噪声声压总级在水下航行器上游段和下游段的分布基本相似,均是随着与水下航行器距离的增大而减小,减小幅度也随之减小。B类和D类噪声声压总级在上游段随着与水下航行器距离的增大而减小,减小幅度也随之减小;但在下游段,只有航速为6 kn时,声压总级是随着与水下航行器距离的增大而减小,而其他航速下,声压总级并不随着水下航行器的距离增大而减小。这可能是由于:随着航速的增大,由航行器尾流扰动导致的部分尾流低频噪声源,与水下航行器翼板或螺旋桨附近流场导致的低频噪声源向空间辐射时相互干涉叠加而形成了较低或较高的声压区。A类噪声在下游段主要由B类噪声主导。

图17 水下航行器水动力噪声声压总级在x方向上的变化规律Fig.17 Changing figures of total sound pressure levels of differentnoises in x-axis direction
根据式(4)计算各航速下4类噪声的声功率总级,然后按照式(6)进行合成处理,获得A类噪声的声功率总级,最后计算各类噪声在A类噪声声功率总级中所占的百分比,并绘制各类噪声声功率总级与航速的关系曲线(图18)。由图可知,所有噪声能量均与速度呈非线性关系,且随着速度的增加而增大。

图18 水下航行器水动力噪声声功率总级与航速的关系Fig.18 Relation curves of total sound power levels of different noises and differentvelocities
各类噪声在A类噪声声功率总级中的百分比如图19所示,可以看出,4类噪声在不同航速下对A类噪声的贡献程度均不一样。航速为6 kn时,B类噪声为主要部分,约占33%,其他3类所占比例相差不大;航速为9 kn时,C类噪声为主要部分,约占44%,其他3类所占比例相差不大;航速为12和15 kn时,E类噪声均为主要部分,其次是D类噪声。由此分析可知:低航速时,航行器壳体及附体引起的水动力噪声为主要部分;随着航速的增大,螺旋桨引起的水动力噪声将明显强于航行器壳体及附体引起的水动力噪声,而成为航行器水动力噪声的主要贡献者。

图19 4类噪声声功率总级百分比条形图Fig.19 Percentage bar chart of the total sound power levels of four kinds of noises
5 结论
本文采用基于大涡模拟(LES)和Lighthill声类比的混合声学计算方法对水下航行器水动力噪声进行了分离预报。通过数值计算得到航行器壳体和螺旋桨流场特性,并分别预报出了壳体流噪声、壳体流激振动噪声、螺旋桨流噪声和螺旋桨流激振动噪声,最后从总体上对水下航行器水动力噪声的声压分布特性以及辐射声能量特性进行分析,可以得到如下结论:
1)壳体流噪声、壳体流激振动噪声、螺旋桨流噪声、螺旋桨流激振动噪声这4类噪声分布在横向关于航行器都有着很好的对称性,在距离航行器壳体表面同等距离下,横向声能量高于轴向,即首尾部分,并随着偏离航行器表面距离的增大而减小。
2)壳体流噪声的主要能量分布在机翼周围,而其他种类的噪声主要靠近水下航行器中段、螺旋桨和水下航行器的前半部分。
3)在上游段,螺旋桨流激振动噪声强于其他3类噪声,总体水动力噪声分布规律主要受螺旋桨流激振动噪声影响;而在下游段,壳体流噪声最强,总体水动力噪声主要受壳体流噪声影响。
4)低速时,由壳体激发的水动力噪声为主要噪声。随着航速的增加,由螺旋桨激发的水动力噪声会越来越大,并逐渐在总噪声中占较大比例。4类噪声能量均与速度呈非线性关系。
[1]XIA H,TUCKER P G,EASTWOOD S.Large-eddy simulations of chevron jet flows with noise predictions [J].International Journal of Heat and Fluid Flow,2009,30(6):1067-1079.
[2]BAILLY C,BOGEY C,GLOERFELT X.Some useful hybrid approaches for predicting aerodynamic noise [J].Comptes Rendus Mécanique,2005,333(9):666-675.
[3]SHUR M L,SPALART P R,STRELETS M K. LES-based evaluation of a microjet noise reduction concept in static and flight conditions[J].Journal of Sound and Vibration,2011,330(17):4083-4097.
[4]CAVALIERIA V,DAVILLER G,COMTE PA,etal.Using large eddy simulation to explore sound-source mechanisms in jets[J].Journal of Sound and Vibration,2011,330(17):4098-4113.
[5]ZHANG N,SHEN H C,YAO H Z.Numerical simulation of cavity flow induced noise by LES and FW-H acoustic analogy[J].Journal of Hydrodynamics(Ser. B),2010,22(Supp 1):242-247.
[6]MAK C M,WANG X,AIZ T.Prediction of flow noise from in-duct spoilers using computational fluid dynamics[J].Applied Acoustics,2014,76:386-390.
[7]张允,傅慧萍,缪国平.基于大涡模拟的开孔潜体流噪声数值模拟[J].上海交通大学学报,2011,45 (12):1868-1873. ZHANG Yun,FU Huiping,MIAO Guoping. LES-based numerical simulation of flow noise for submerged body with cavities[J].Journal of Shanghai Jiaotong University,2011,45(12):1868-1873.
[8]江文成.潜艇流噪声与流固耦合作用下流激噪声的数值模拟[D].上海:上海交通大学,2013.
[9]张咏鸥,张涛,刘继明,等.基于Lighthill声类比的流激噪声三维计算及验证[J].舰船科学技术,2014,36(9):55-59,64. ZHANG Yongou,ZHANG Tao,LIU Jiming,et al. Three dimensional simulation and validation of the flow-induced noise based on lighthill's acoustic analogy theory[J].Ship Science and Technology,2014,36 (9):55-59,64.
[10]李陈叶.美国MK46鱼雷[J].现代舰船,1999(1):35-37.
[11]吕世金,苗金林,张晓伟.水下高速航行体艏部水动力自噪声预报方法及低噪声线型设计[J].水动力学研究与进展(A辑),2012,27(3):303-310. LV Shijin,MIAO Jinlin,ZHANG Xiaowei.Prediction method of hydrodynamic self-noise and design of low noise bow profile for underwater high speed vehicle[J].Journal of Hydrodynamics(Ser.A),2012,27 (3):303-310.
[12]LIU JM,ZHANG T,ZHANG Y O.Numerical study on flow-induced noise for a steam stop-valve using large eddy simulation[J].Journal of Marine Science and Application,2013,12(3):351-360.
[13]ZHANGYO,ZHANG T,OUYANG H,etal.Flow-induced noise analysis for 3D trash rack based on LES/ Lighthill hybrid method[J].Applied Acoustics,2014,79:141-152.
[14]孟堃宇.基于大涡模拟的潜艇脉动压力与流噪声性能数值计算[D].上海:上海交通大学,2011.
[责任编辑:喻菁]
Separating prediction of the hydrodynamic noise of an underwater vehicle
WANG Kang1,LIU Guoqing1,WANGQiang2,ZHANG Yongou1,3,LIXu11 Schoolof Naval Architecture and Ocean Engineering,Huazhong University of Science and Technology,
Wuhan 430074,China
2China Ship Development and Design Center,Wuhan 430064,China 3 Department of Mechanicaland Aerospace Engineering,University of California San Diego,
California 92093-0411,USA
In recent years,acoustic stealthiness,being one of the most important parameters to evaluate underwater vehicles'operational performance,has received widespread attention.However,the hydrodynamic noise of underwater vehicles has seldom been studied.In this paper,hydrodynamic noise is classified into four categories:the flow-induced noise of the shell,the noise of flow excited-vibration of the shell,the flow induced-noise of the propeller,and the noise of flow excited-vibration of the propeller,all of which are predicted by using the Large Eddy Simulation(LES)and the Lighthill'sacoustic analogy method.Firstly,the effectiveness of these hybrid acoustic simulation methods is verified with present research results.Then,the simulation of four noise types is conducted,where the analysis is made respectively by sound power level,sound pressure level contours,and total sound pressure levels.It is seen that the relations between the four types and the relevant speed are all non-linear.Specifically,the major noise in the upstream is that from the flow-induced vibration of propellers,while the major noise in the downstream is the flow-induced noise of shells.Furthermore,the hydrodynamic noise induced by the shell is the major noise at low speed,and the hydrodynamic noise induced by the propellers gradually increases with the increase of speed.
underwater vehicle;Large Eddy Simulation(LES);Lighthill's acoustic analogy;hydrodynamic noise;flow-induced noise;noise from the flow-induced vibration
U661.39
A
10.3969/j.issn.1673-3185.2015.04.005
2014-11-04网络出版时间:2015-7-28 17:25:13
国家留学基金委资助项目(201406160032);华中科技大学国防自主创新研究基金资助项目(01-18-140019)
王康,男,1989年生,硕士生。研究方向:流激噪声,结构强度分析。E-mail:274504943@qq.com刘国庆(通信作者),女,1991年生,硕士生。研究方向:流激噪声,船舶与海洋工程结构物设计制造。E-mail:liugq_2010@163.com张咏鸥,男,1989年生,博士生。研究方向:流激噪声,气泡声学。E-mail:zhangyo1989@gmail.com
