基于频率采样方法的FIR甲板运动补偿器设计
2015-09-01王治国瞳中国舰船研究设计中心湖北武汉430064
王治国,汪 瞳中国舰船研究设计中心,湖北武汉430064
基于频率采样方法的FIR甲板运动补偿器设计
王治国,汪瞳
中国舰船研究设计中心,湖北武汉430064
航空母舰甲板垂向运动是舰载机高海况着舰误差的主要因素,为提高舰载机在高海况下的自动着舰精度,自动着舰系统采用甲板运动补偿器根据甲板垂向运动生成补偿指令,以驱动舰载机精确跟踪甲板运动,从而减少着舰误差。常规甲板运动补偿器在补偿频率范围内虽然可以实现预期补偿效果,但在补偿频率范围外存在高增益区域,对甲板运动中的高频分量起放大作用,并且将其混入生成的补偿指令中,会对舰载机飞行安全产生影响。为在有效补偿的同时减少对甲板运动高频分量的放大作用,通过对舰载机自动着舰系统的频率响应按频率进行采样,设计出离散甲板运动补偿器频率响应,采用频率采样法设计数字式有限冲击响应(FIR)甲板运动补偿器。仿真结果表明:所设计的基于频率采样方法的FIR甲板运动补偿器在有效补偿由甲板运动引起的舰载机着舰误差的同时,可有效降低甲板运动高频分量的影响,提高着舰精度。
航空母舰;舰载机;自动着舰;频率采样;甲板运动;补偿
0 引言
航空母舰(简称“航母”)在海上航行时,海浪及风作用于舰体,引起航母的横摇、纵摇、艏摇及垂荡等运动,严重影响舰载机着舰时的精度和安全性[1-2]。如图1所示,当舰载机按等角下滑方式着舰时,航母甲板突然下沉并且出现纵摇,舰载机最终的尾钩落点会跨过4根阻拦索,产生较大的着舰水平误差,致使舰载机必须逃逸复飞。由此可见,甲板运动对舰载机着舰是否成功影响很大。

图1 甲板运动造成着舰误差示意图Fig.1 Landing deviation caused by deck motion
为提高舰载机的着舰安全性,美国从20世纪中期开始大力发展舰载机自动着舰技术[3]。图2为美国舰载机自动着舰系统组成框图,在舰载机自动着舰过程中,着舰引导雷达测量的位置信息在进行导引律计算之前进行了稳定处理,不包含航母甲板的运动信息[4],因此,当舰载机按理想下滑道精确飞行着舰时,航母的甲板运动就成为舰载机自动着舰的主要误差来源。为减小因航母甲板运动造成的着舰误差,美国舰载机自动着舰系统采用了甲板运动补偿器,可根据航母甲板运动生成补偿指令,在舰载机着舰前约12.5 s时加入引导指令,使舰载机能随时精确跟踪航母甲板运动,调整飞行轨迹,使其随甲板起伏而起伏,从而减小由舰体运动造成的着舰误差[5]。

图2 舰载机自动着舰系统组成框图Fig.2 Structure of automatic carrier landing system
常规甲板运动补偿器基于超前网络设计,利用超前网络的相位超前特性改善舰载机自动着舰系统的动态特性,从而提高舰载机跟踪甲板运动的精度以提高着舰精度。但是,超前网络又存在高频增益较大的特点,使得舰船运动中的高频分量得以放大,并混入自动着舰系统,影响舰载机飞行安全性。对此,本文将首先分析甲板运动补偿对提高舰载机着舰精度的机理以及常规甲板运动补偿器存在的缺点,并利用基于频率采样的方法设计数字式有限冲击响应甲板运动补偿器,在实现更高精度的补偿甲板运动的同时,有效弥补常规甲板运动补偿器的缺陷,并较好地补偿由甲板运动引起的舰载机着舰误差,最后,通过仿真验证该设计方法的合理性。
1 甲板运动补偿的基本原理
图3为舰载机自动着舰系统的闭环波特图。在低频段内,舰载机自动着舰系统存在较大的相位滞后,并且幅频特性也存在较大变化[6-7],而航母的甲板运动主要在此低频段,因此,如果让舰载机直接跟踪航母甲板运动,必然会出现舰载机的起伏运动滞后于航母甲板运动的情况,并因而出现较大的跟踪误差[8-9]。

图3 舰载机自动着舰系统的闭环波特图Fig.3 Closed-loop Bode diagram of automatic carrier landing system
由图3可见,在低频段,舰载机自动着舰系统的相位具有非线性的特点,即舰载机自动着舰系统对不同频率甲板运动滞后的时长不同,因此,如果通过预估甲板运动抵消舰载机运动的滞后,让舰载机跟踪预估的甲板超前运动,则会出现甲板运动预估时长难以确定的问题。
甲板运动补偿器的功能是对舰载机自动着舰系统的频率响应ACLS(jω)进行校正,使其在低频段的幅频特性近似为1,相频特性近似为0;或具有线性相位,使舰载机的起伏运动跟踪航母甲板运动的滞后为固定延时,再通过甲板运动预估予以消除。
美国海军舰载机的自动着舰系统中采用的甲板运动补偿器如式(1)所示[9]:


图4 甲板运动补偿器波特图Fig.4 Bode diagram of deck motion compensator

图5 加入甲板运动补偿器后的自动着舰系统波特图Fig.5 Bode diagram of automatic carrier landing system with deckmotion compensator
由于超前网络在提供超前相位的同时,在高频段存在高增益,虽经补偿滤波网络抑制可降低甲板运动补偿器的高频增益,但在局部频段内仍会存在局部高增益。由图4可见,在1~10 rad/s范围内,甲板运动补偿器幅频特性超过了0 dB,最大接近10 dB。由图5可见,在相应频率范围内,自动着舰系统的增益较图3也有较大的提升。
式(1)所示常规甲板运动补偿器可有效补偿舰载机自动着舰系统的低频段,但在补偿频段以外仍存在较大增益,在高海况下会对船舶运动中的高频分量起放大作用,并会将放大后的高频信号送入舰载机自动着舰系统中,进而对舰载机飞行造成影响。为避免这种情况,要求甲板运动补偿器在实现补偿功能的同时应具有较好的低通滤波能力,即不能出现高增益。但由于式(1)所示常规甲板运动补偿器中存在超前环节,该环节在提供相位超前的同时,也造成了局部高增益,因此,利用常规甲板运动补偿器难以实现较好的低通滤波性能。
2 FIR甲板运动补偿器设计方法
有限冲击响应滤波器FIR具有实现任意频谱的能力[10-11],因此,可考虑采用有限冲击响应滤波器来实现具备较好的低通滤波性能的甲板运动补偿器。
由于甲板运动补偿器的设计原理是校正自动着舰系统闭环频率响应,使幅频特性近似为1,相频特性近似为0,或将相频特性校正为线性相位,因此可以采用频率采样的方法设计FIR甲板运动补偿器。首先,获取自动着舰系统的低频段频率响应,然后,求取甲板运动补偿器的频率响应,再采用频率采样法设计FIR甲板运动补偿器的单位脉冲响应,从而得出FIR甲板运动补偿器。下面,给出具体的设计方法:
第1步:选取FIR甲板运动补偿器的采样周期为T。


第3步:确定FIR甲板运动补偿器单位脉冲响应长度。

第4步:求取甲板运动补偿器的频率响应。


取:

上式中,arg DMC()k中的-M·T·k是为了实现利用FIR甲板运动补偿器校正后舰载机运动相对甲板运动具有线性相位,即存在固定延时,该延时为M·T,该固定延时可通过甲板运动预估予以消除,即预报M·T以后的甲板运动送入FIR甲板运动补偿器,从而实现舰载机运动对甲板运动的精确跟踪。

其中,μ(l),l=1,…,L为修正参数,μ(l)具有以下特点:

第5步:对DMC()k做离散傅立叶反变换,求取确定FIR甲板运动补偿器单位脉冲响应。

则FIR甲板运动补偿器可表达为

式中:x()n为送入FIR甲板运动补偿器的甲板运动预报数据;y()n为FIR甲板运动补偿器的输出。
第6步:根据DMC()k计算频率响应,如果不能满足需求,则调整参数,重新上述设计过程。
3 仿真验证

按第2节FIR甲板运动补偿器介绍设计方法,设计步骤如下。
第1步:选取FIR甲板运动补偿器的采样周期为0.25 s。

第3步:确定FIR甲板运动补偿器单位脉冲响应长度为400。

图6 采用FIR甲板运动补偿器的舰载机自动着舰仿真系统构架Fig.6 Framework of automatic carrier landing simulation system with FIR deck motion compensator

图7 自动着舰系统闭环频率响应采样Fig.7 Closed-loop frequency sampling of automatic carrier landing system
第4步:求取甲板运动补偿器的频率响应。
M=10,则通过FIR甲板运动补偿器校正后,舰载机运动较甲板运动存在MT=2.5 s的固定延时。
设计的FIR甲板运动补偿器期望频率响应如图8所示。

图8 甲板运动补偿器期望频率响应Fig.8 Desired frequency sampling of deck motion compensator
第5步:对DMC()k做离散傅立叶反变换,求取确定FIR甲板运动补偿器单位脉冲响应。DMC()k如图9所示。
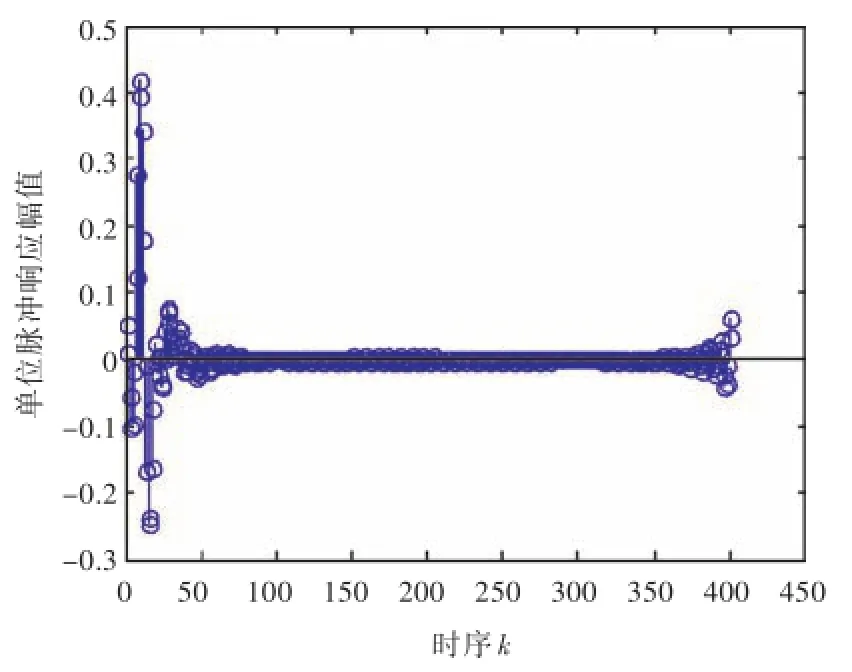
图9 甲板运动补偿器单位脉冲响应Fig.9 Unit impulse response of deck motion compensator
第6步:根据DMC()k计算频率响应,如图10所示。该FIR甲板运动补偿器可以较好地校正舰载机自动着舰系统的幅频特性,并能将自动着舰系统的相频特性在低频段校正为线性相位。此外,该FIR甲板运动补偿器还具有良好的低通滤波性能,峰值放大倍数约为2.1,即6.4 dB,较图4降低了约3.6 dB。

图10 FIR甲板运动补偿器频率响应Fig.10 Response of FIR deck motion compensator
将甲板运动直接送入该FIR甲板运动补偿器,可得结果如图11所示。

图11 FIR甲板运动补偿器输入输出Fig.11 Input and output of FIR deckmotion compensator
舰载机跟踪甲板运动情况如图12所示。
由图12可见,舰载机运动相对甲板运动存在2.5 s的固定延时。
将提前2.5 s的甲板运动预报数据送入该FIR甲板运动补偿器后,可得结果如图13所示。

图12 舰载机运动跟踪甲板运动情况Fig.12 Deckmotion tracking trajectory of aircraft

图13 将预报数据送入FIR甲板运动补偿器后的输入输出Fig.13 Inputand outputof FIR deck motion compensator after inputted the forecasted data
舰载机跟踪甲板运动情况如图14所示。

图14 将预报数据送入FIR甲板运动补偿器后舰载机运动跟踪甲板运动情况Fig.14 Deckmotion tracking trajectory ofaircraft after inputted the forecasted data
由图14可见,舰载机运动跟踪甲板运动的精度有较大的提升。
4 结语
本文分析了航母甲板运动对着舰的影响以及甲板运动补偿对提高着舰精度的机理,指出常规甲板运动补偿器由于在补偿频段以外存在较大增益,导致在高海况下会出现对船舶运动高频分量放大并影响舰载机飞行的缺陷。采用基于频率采样方法设计的数字式有限冲击响应甲板运动补偿器,在有效补偿舰载机运动的同时,具备良好的低通滤波能力,可有效抑制船舶运动高频分量混入自动着舰系统,避免对舰载机运动产生影响。最后,通过仿真验证了该设计方法的合理性。
[1]许卫宝.飞行员着舰的多层次模糊综合评价方法[J].中国舰船研究,2013,8(2):17-21. XU Weibao.A comprehensive evaluation method for carrier landing based on fuzzy analytical hierarchy process[J].Chinese Journal of Ship Research,2013,8 (2):17-21.
[2]朱齐丹,李晖,夏桂华,等.舰载机着舰风险动态多属性决策[J].哈尔滨工程大学学报,2013,34(5):615-622. ZHU Qidan,LI Hui,XIA Guihua,et al.Dynamic multi-attribute decision making of carrier-based aircraft landing risk[J].Journal of Harbin Engineering University,2013,34(5):615-622.
[3]许宏泉,吴定刚,谢红胜.一种用于航母自动着舰的视觉伺服技术[J].舰船科学技术,2013,35(7):74-76,82. XU Hongquan,WU Dinggang,XIE Hongsheng.A visual servoing technique applied to carrier aircraft automatic deck landing[J].Ship Science and Technology,2013,35(7):74-76,82.
[4]吴文海,拜斌,范海震,等.基于光电引导的全天候自动着舰模式研究[J].飞行力学,2013,31(2):126-129,134. WU Wenhai,BAI Bin,FAN Haizhen,et al.Research on all-weather automatic carrier landing based on opto-electronic guidance[J].Flight Dynamics,2013,31 (2):126-129,134.
[5]邓娟,颜振萍,艾剑良.模糊控制技术在自动着舰控制系统中的应用[J].系统仿真学报,2012,24(3):645-650. DENG Juan,YAN Zhenping,AI Jianliang.Application of fuzzy control technology to automatic carrier landing system[J].Journal of System Simulation,2012,24(3):645-650.
[6]许晓燕,陈澜.基于LQG/LTR的舰载飞机纵向自动着舰控制系统设计[J].科学技术与工程,2012,12 (23):5837-5840,5846. XU Xiaoyan,CHEN Lan.Design of automatic controlsystem for longitudinal landing on carrier on LQG/LTR [J].Science Technology and Engineering,2012,12 (23):5837-5840,5846.
[7]王敏,张晶,申功璋.基于甲板运动预报的自动着舰系统综合设计[J].系统仿真学报,2010,22(增刊1):119-122. WANG Min,ZHANG Jing,SHEN Gongzhang.Design of automatic carrier landing system based on deck motion prediction[J].Journal of System Simulation,2010,22(Supp1):119-122.
[8]张永花,周鑫.纵向甲板运动补偿技术研究[J].电光与控制,2012,19(4):18-22. ZHANG Yonghua,ZHOU Xin.Study on the longitudinal deck motion compensation technique[J].Electronics Optics and Control,2012,19(4):18-22.
[9]周鑫,彭荣鲲,袁锁中.舰载机理想着舰点垂直运动的预估与补偿[J].航空学报,2013,34(7):1663-1669. ZHOU Xin,PENG Rongkun,YUAN Suozhong.Prediction and compensation for vertical motion of ideal touchdown point in carrier landing[J].Acta Aeronautica ET Astronautica Sinica,2013,34(7):1663-1669.
[10]龙安,陈华.基于MATLAB的频率采样法设计FIR滤波器[J].广西科学院学报,2011,27(1):68-70. LONG An,CHEN Hua.Frequency sampling method for FIR filter design[J].Journal of Guangxi Academy of Sciences,2011,27(1):68-70.
[11]刘仲,陈跃跃,陈海燕.支持任意系数长度和数据类型的FIR滤波器向量化方法[J].电子学报,2013,41(2):346-351. LIU Zhong,CHEN Yueyue,CHENHaiyan.A vectorization of FIR filter supporting arbitrary coefficients length and data types[J].Acta Electronica Sinica,2013,41(2):346-351.
[12]夏桂华,董然,孟雪,等.舰载机着舰的动力学建模[J].哈尔滨工程大学学报,2014,35(4):445-456. XIA Guihua,DONG Ran,MENG Xue,et al.Research on the dynamic modeling for the landing of a carrier-based aircraft[J].Journalof Harbin Engineering University,2014,35(4):445-456.
[13]钟涛.带有舰尾流的舰载机进场动力补偿系统分析[J].中国舰船研究,2013,8(3):8-13. ZHONG Tao.Analysis of the approach power compensator system with carrier air wake[J].Chinese Journal of Ship Research,2013,8(3):8-13.
[14]郑峰婴,杨一栋.变后掠翼舰载机抗侧风自动着舰引导系统[J].飞行力学,2011,29(2):37-40. ZHENG Fengying,YANG Yidong.Counteracting side wind in automatic carrier landing system for variable swept wing carrier-aircraft[J].Flight Dynamics,2011,29(2):37-40.
[15]周鑫,彭荣鲲,袁锁中,等.舰载机着舰纵向甲板运动预估及补偿技术[J].南京航空航天大学学报,2013,45(5):599-604. ZHOU Xin,PENG Rongkun,YUAN Suozhong,et al.Longitudinal deck motion prediction and compensation for carrier landing[J].Journal of Nanjing University of Aeronautics and Astronautics,2013,45 (5):599-604.
[责任编辑:喻菁]
FIR deck motion compensator design based on the frequency sampling approach
WANGZhiguo,WANGTong China Ship Developmentand Design Center,Wuhan 430064,China
The vertical motion of the aircraft carrier is amajor cause behind carrier-based aircraft landing error.In order to enhance the landing precision of carrier-based aircraft in high sea state,the automatic carrier landing system incorporates a deck motion compensator to generate the compensation command that corresponds with the vertical deck motion.This command guides the aircraft's tracking motion precisely and reduces the landing error significantly.In most cases,the deck motion compensator can realize the expected compensation effect within the compensation frequency region,but it usually induces a high gain region outside the compensation range,which amplifies the high frequency component of deck motion and threatens the aircraft flight safety.In order to compensate deck motion effectively and reduce the influence of the high frequency component of deckmotion,the frequency response ofa discrete deckmotion compensator is designed in this paper through an automatic landing frequency samp ling system,and a deckmotion compensator with digital Finite Impulse Response(FIR)is also designed by using the frequency sampling method.The simulation results indicate that the proposed FIR deck motion compensator can decrease the aircraft landing deviation effectively.
aircraft carrier;carrier-based aircraft;automatic landing;frequency sampling;deck motion;compensation
U674.771
A
10.3969/j.issn.1673-3185.2015.04.004
2014-12-10网络出版时间:2015-7-28 17:25:08
国家部委基金资助项目
王治国,男,1977年生,高级工程师。研究方向:舰船总体研究与设计。E-mail:498750356@qq.com汪瞳(通信作者),男,1984年生,博士,工程师。研究方向:舰载机着舰引导技术。E-mail:wangtong701@foxmail.com
