基于ARM的远程分布式监控系统
2015-08-30吴燕,王蓓
吴 燕,王 蓓
(江西科技学院信息工程学院,江西 南昌 330098)
基于ARM的远程分布式监控系统
吴 燕,王 蓓
(江西科技学院信息工程学院,江西 南昌 330098)
以灯塔航标的遥控遥测为背景,从低成本、高品质、易推广的角度出发,设计一种基于嵌入式技术为通讯平台的远程分布式监控系统。系统由远程终端(RTU)—服务器—GIS客户端等组成,在实际使用中取得良好的效果,具有一定的推广意义。
分布式监控系统;主控制器ARM;分布式控制单元
0 引言
近年来,随着传感器技术、网络通信技术及计算机技术的发展,分布式监控系统已在设备监测诊断、环境监测、医疗监控、工程健康监测等领域获得广泛应用[1]。基于互联网技术的分布式监控系统把不同地域,不同设备终端,通过TCP/IP协议,连接在网络上[2],从而实现远程测量和控制的功能,其核心思想是“集中管理、分散控制”[3],将系统模块化,各个模块完成各自独立的功能,实现并行工作,系统的维护和管理变得相对简单,提高了整个系统的处理速度和可靠性。此系统特适用于灯塔航标这种控制对象较为分散、分布范围较广、环境较为恶劣的情况。
1 系统的总体实现
1.1 系统的组成
系统从功能上划分,主要由分布式控制单元,主控制器ARM,服务器,GIS客户端以及通信网络组成,其整体构架图如图1所示。此系统的设计可实现灯塔航标各个设备的地理位置的分散,完成整个系统的数据采集、控制过程、监控管理、运行显示等功能上的相互分散、独立;且每个单元模块都有独立的CPU,一个模块出现故障不影响其他模块的正常工作,不仅能提高可靠性,更便于维护。
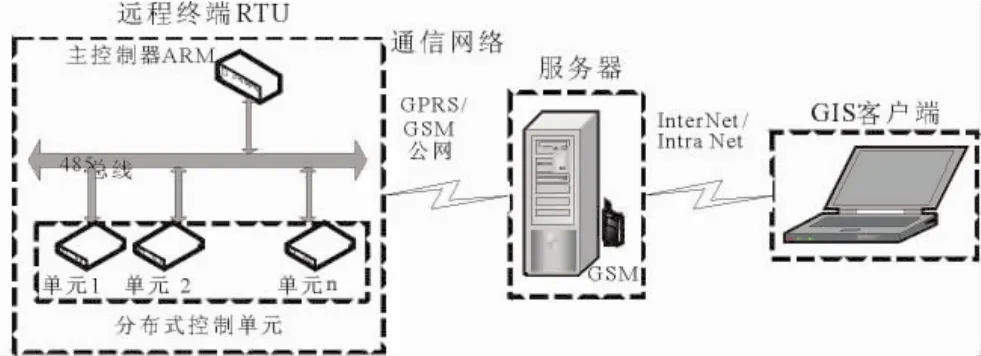
图1 基于ARM的远程分布式监控系统构架图
1.2 系统的功能
分布式控制单元负责数据的采集,如现场传感器检测灯塔航标的工作状态及各种参数,定时上传数据,响应服务器的指令等。
主控制器ARM实现分布式控制单元与服务器的数据、指令的传输通信。其与分布式控制单元之间采用RS485现场总线进行通信;与服务器的通信,则定时通过modem模块将数据发到移动通信基站,而移动中心再通过专网GPRS VPN/GSM将数据传给服务器。
通信网络实现主控制器ARM与服务器的通信事务,采用GPRS VPN专网,通过TCP/IP协议与服务器通信;网络信号质量差的时候,GSM[4]短息作为辅助的通信手段,这种公网的选择,可充分利用公共资源,就监测数据较短的特点,短息服务的140字节可满足数据传输要求,针对少数较长的数据可进行拆包处理,短息的滞后性对灯塔航标的监测数据的影响基本无碍。
服务器采用VB6.0开发环境和大型关系数据库Oracle技术实现服务器的功能,利用VB6.0中的Winsock控件,通过Internet/Intranet网络采用TCP协议与RTU通信,其负责将RTU送来的数据进行数据转换,存入Oracle数据库中,显示参数在界面上,并将最新数据通过Internet/Intranet网络发送给GIS客户端;同时,可以通过此服务器的人机交互界面对分布式单元进行查询,设置等操作。
GIS客户端采用VB6.0开发,使用美国环境系统研究所(ESRI)的ActiveX地图控件Map Object2.0进行地图管理[5],与服务器之间利用VB6.0中的Winsock控件,通过Internet/Intranet网络的TCP协议进行通信。其将数据库中的最新数据显示在与地理位置对应的电子海图上,能提供检索和分析数据的功能。
2 分布式远程终端RTU的功能实现
2.1 主控制器的原理构成
图1中的远程终端RTU由主控制器ARM、RS485、各分布式控制单元组成,可实现层层分散,集中控制的功能。其中,分布式控制单元按照功能划分模块,形成开放式体系结构,是整个系统的关键技术之一;主控制器ARM部分硬件框图如图2所示。
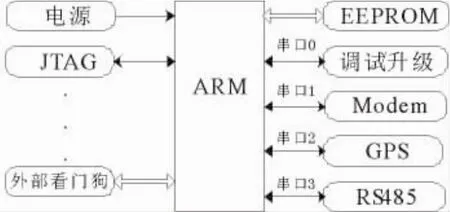
图2 主控制器ARM部分硬件框图
在图2中的微处理器ARM采用ADS1.2作为开发平台及ARM 7架构的PHILIPS LPC2368,片内资源丰富,自带的JTAG接口可用于程序的单步调试。串口0用于调试和在线升级;串口1接Modem模块,用于GPRS/GSM通讯;串口2接GPS,用于经纬度位置的测量;串口3接RS485现场总线,用于连接分布式控制单元;外接512M的E2PROM保存配置数据、历史数据等;考虑到LPC2368内部的看门狗用于升级不太稳定,增加外部看门狗。
2.2 主控制器的功能实现
RS485是工业界使用最广泛的双向、平衡传输线标准接口[6],它以半双工模式通信,支持多点连接,便于组成低廉、可靠性高的总线网络。基于本工程项目的实际特点,采用RS485完成主控制器ARM与分布式控制单元的通讯,结合Modbus ASCII通信协议[7],消息以冒号字符(ASCII码是3AH)开始,以回车换行符结束(ASCII码是0DH和0AH),根据地址域区分各个分布式控制单元。
本系统的设计中,每个分布式控制单元均带一个4位的拨码开关,即地址域可为十六进制的00H到0FH;00H作为主控制器的地址域,则每个主控制器ARM可接分布式控制单元为15个,包括模拟型采集器,数字型采集器,蓄电池采集器及协议转换器,且协议转换器还可接外围设备如PLC,雷达应答器或LM300灯器等,其分布式控制单元的系统框图如图3所示。

图3 分布式控制单元的系统框图
2.3 数据的处理
主控制ARM的任务流程可分为两大块,一是周期任务,采用时间驱动机制,执行预先设定的需执行的任务,如定时查询分布式控制单元的数据采集情况,自检并校正一些重要的默认配置参数等;一是非周期任务,采用事件驱动机制,是对紧急情况的处理,如设置分布式控制单元的参数,重启分布式控制单元等。本程序设计中,非周期性任务的优先级比周期性任务的优先级要高。
主控制ARM对分布式控制单元的操作采用分布式处理,如图4中的实线框所示,查询和设置指令数据分别存放在发送缓冲区0和发送缓冲区1中,发送数据给分布式控制单元的时间到,就检查发送缓冲区1缓冲区有数据要发送,否则检查发送缓冲区0缓冲区,其功能实现的流程图如图5所示。

图4 数据的处理框图
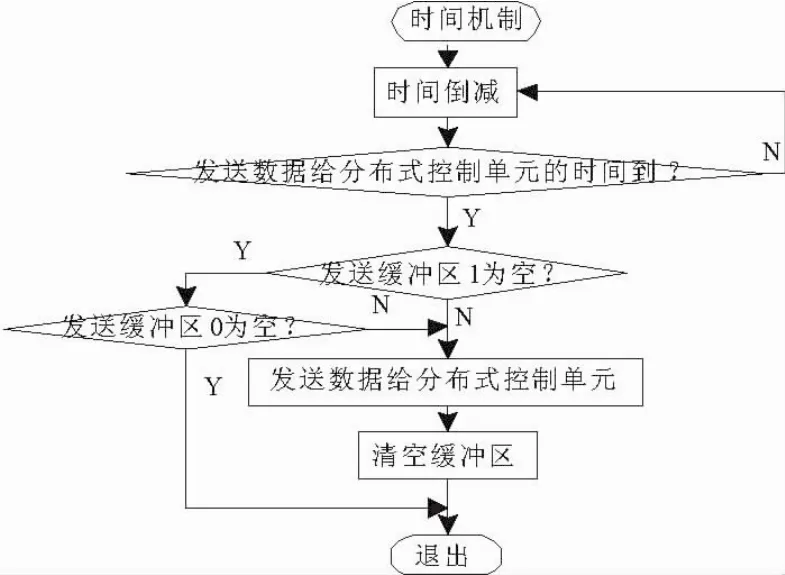
图5ARM转发数据给分布式控制单元的流程图
分布式控制单元上传给主控制器的数据采用分级方式处理,如图4中的虚线框所示,先将数据存放在分布式控制单元的数据缓冲区中,再进行组包或拆包,即进行规定协议的数据处理,将数据存放在临时缓冲区中,向服务器发送数据的时间到,再将数据移到modem的发送缓冲区中,通过GPRS/GSM发送给服务器,其功能实现的流程图如图6和图7所示。
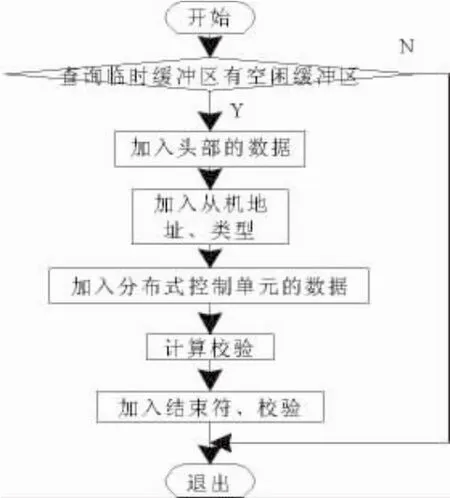
图6 将数据打包存入临时缓冲区
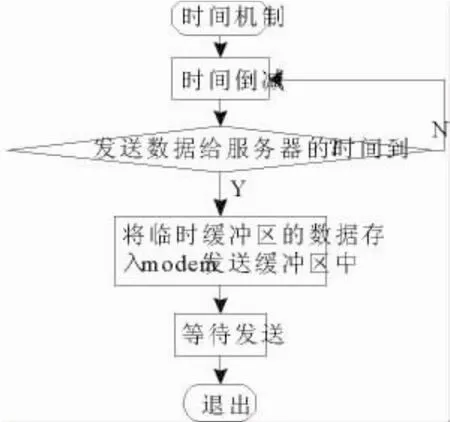
图7 临时缓冲区的数据存入modom发送缓冲区
3 结束语
本文所设计的系统基于ARM技术,采用分布式结构,具有良好的智能性、可维护性及可扩展性,并且数据采集可靠、通信稳定。该系统已开始应用于实际灯塔航标的遥控遥测建设中,在海南安装灯塔设备24套,每套各带4到7个不同的分布式控制单元,至今运行可靠。
[1]王丰贵,田地.面向服务的分布式监测系统体系结构设计应用[J].计算机工程与设计,2009(11).
[2]吴燕;吴允平;李汪彪等.灯塔分布式测控终端系统的设计与实现[J].微计算信息息,2011(05).
[3]张长海,朱勤芹,索长征等.基于CAN总线的分布式控制系统的设计[J].中国高新技术企业,2008(15).
[4]侯大伟,何建忠.基于GSM的远程分布式数据采集与控制系统[J].计算机工程与设计,2009(9).
[5]吴允平,蔡声镇,刘华松等.航标遥测遥控信息系统的设计与实现[J].计算机工程,2006(06).
[6]佃松宜,汪一,汪道辉.基于RS485总线的远程双向数据通信系统的设计与实现[J].计算机应用,2001(11).
[7]陈池,陈峦,任金忠.基于MODBUS协议的RS-485工业现场总线系统[J].装备制造技术,2009(5).
[8]沈学优.基于ARM的分布式电能质量监测系统研究[D].邯郸:河北工程大学,2012.
[9]郑晓曦.基于ARM的视频监控系统的研究及应用[J].数字技术与应用,2013(12).
[10]赵建洋,丁卫红,李海宁等.智能电网分布式测控同步方法[P].中国专利,H04J3/06(2006.01)I,2012-6-1.
(责任编辑:陈 辉)
Remote Distributed Measurement and Control System Based on ARM
WU Yan,WANG Bei
(College of Information Engineering,Jiangxi University of Technology,Nanchang 330098,China)
Based on remote controlling of pharos,a sort of remote distributed measurement and control system was introduced from the perspective of low cost,high performance and easiness to popularize by embedded technology.The system consists of remote terminal unit(RTU,communications network,server and GIS client.This design project has achieved satisfactory effect in application,and has certain value for popularization.
distributed measurement and control system;host controller ARM;districted control unit
TP23
A
123(2015)01-0027-03
2014-07-25
吴 燕(1986-),女,江西上饶人,江西科技学院信息工程学院,讲师,硕士。研究方向:测控技术与智能系统。
王 蓓(1980-),女,浙江海宁人,江西科技学院信息工程学院,讲师,硕士。研究方向:嵌入式系统。
