半潜型风电浮式基础运动特性试验研究
2015-08-30刘中柏唐友刚王涵杨钢林维学李嘉文
刘中柏 ,唐友刚 ,王涵 ,杨钢 ,林维学 ,李嘉文
(天津大学建筑工程学院水利工程仿真与安全国家重点实验室,天津300072)
由于环境污染和能源短缺,可再生资源受到广泛的重视[1]。风力发电日益成为新能源中最具开发条件和最有发展前景的发电方式,我国风能资源丰富,尤其是在水深大于50 m的海域,因此海上风力发电日益成为一种具有战略意义的新能源形式,海上浮式风机也越来越受到各个国家的重视。
国外已经开展了各种形式海上浮式风机模型试验,Nielsen F G等[2]人在Hywind风机试验中使用了电动机带动小风机模型运转;CHRISTIAN C[3]在windfloat试验中采用等效圆盘模拟风力机受风面积;Shinada K等[4]在半潜式试验中在运行工况风力机等效为圆盘,生存工况下等效为3根梁,将锚泊系统简化为水平方向的线性弹簧;赵静等[5]提出使用圆盘代替风力机的等效原则。
本次试验在国外模型试验的基础上,在对风力机和系泊系统模拟上给予了更充分的考虑,试验研究得到了风机的固有周期、幅频响应曲线和定常风对风机运动的影响。
1 浮式风机模型模拟
1.1 浮式风机模型参数
本文以美国可再生能源研究所(NREL)公布的5 MW半潜型风机模型为例[6],以天津大学曹菡等[7]对浮式风机的详细设计为参照,采用1∶50的缩尺比进行制作模型和试验研究。浮式风机适用水深为120 m,额定风速为 11.4 m/s。
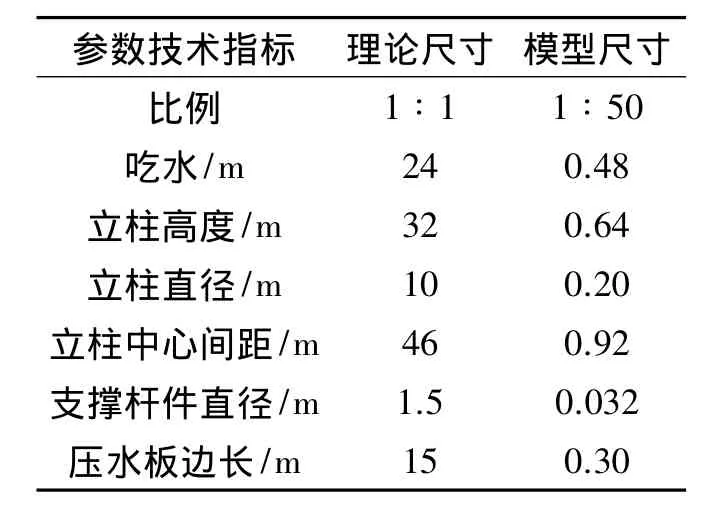
表1 浮式风机模型主尺度Table 1 Main scale of the model
1.2 浮式风机模型重量参数
文中选取的坐标系:Z轴竖直向上且与塔柱的中心轴重合,零点位于水线面处;X轴和Y轴零点位于塔柱中心。浮式风机模型的重量参数如表2所示。

表2 浮式风机模型重量参数Table 2 Main weight parameters of the model
1.3 风力发电机模拟
风力发电机通过巨大的风力机(包括叶片和轮毂)将风中的动能转化为机械能,因此风力机是风力发电机最主要的承载部件,风力机主要承受3种力:空气动力、重力和惯性力。空气动力载荷的模拟是风电模型试验的重要组成部分。
Christian Cermelli等[3]在 Windfloat模型试验中,在运行工况下将风力机可等效为圆盘,塔架顶端安装电动机带动金属棒旋转,以模拟风轮回转效应。虽然这种模拟简单易操作,但并不能很好的模拟出叶片所受的空气动力载荷,因为风机叶片产生的气动风载荷,具有频率特性,而对于运动的浮体来说,频率特性对于运动大小影响显著。本次试验通过在塔架顶部安装60 W电动机,带动叶片以14 r/m来模拟实际风机的回转效应和所受空气动力载荷。
2 系泊系统模拟
Shinada k等[4]在半潜式风机试验中提出将锚泊系统简化成水平方向的线性弹簧,但没有进行锚泊系统测量及验证。由于系泊链在水中成悬链形状,浮式风机在风、浪、流中运动时,系泊链会受到拉力而伸长变形,因而对对系泊链的模型要求按实体根据几何相似和弹性相似进行制作和模拟。
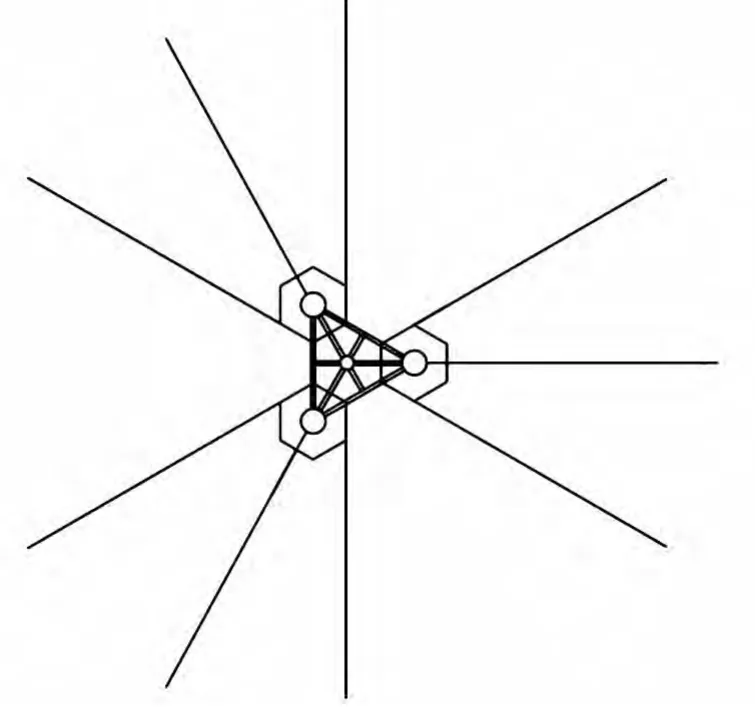
图1 系泊布置图Fig.1 Mooring arrangement
由于半潜型浮式基础的主体由3个浮筒组成,所以使用3组锚链,共9根悬链式的锚链进行系泊定位。每个立柱下缘的3根锚链为一组,导缆孔位于立柱下缘,如图1所示。本次试验中系泊链是由钢丝绳、微型锚链和弹簧构成。
3 试验流程
3.1 风机模型制作、调整及安装
风机模型采用1∶50的缩尺比,材料为工程塑料。根据相似准则得到的模型的重量、重心位置和转动惯量,通过在3个立柱内添加、调整压载铁来调整模型的重量、重心和转动惯量。之后把调整好的模型、系泊系统、风扇矩阵和光学六自由度三维运动测量仪一起安装在水池中,如图2所示。

图2 半潜型浮式基础风机试验模型Fig.2 Semi-submersible FOWT model
3.2 试验工况
试验工况主要分为以下3种:
1)无浪无风工况:在风机系统平衡位置附近,分别对风机施加垂荡、纵荡和纵摇激励,使风机系统产生衰减运动,测试模型垂荡、纵荡和纵摇的时间历程曲线。
2)有浪无风工况:波浪与X轴夹角为0°,波高分别取 4、10 cm,波浪周期为 1~3.6 s,每隔 0.2 s测量一组数据,记录风机模型运动。
3)有浪有风工况:波浪与X轴夹角为0°,风速取1.6 m/s,波高10 cm,波浪周期为 1~3.6 s,每隔0.2 s测量一组数据。
4 试验结果
4.1 自由衰减曲线
在静水中的自由衰减曲线如图3,根据其自由衰减曲线,得到3个自由度的固有周期如表3所示。
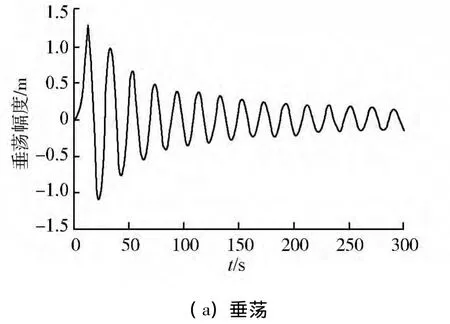
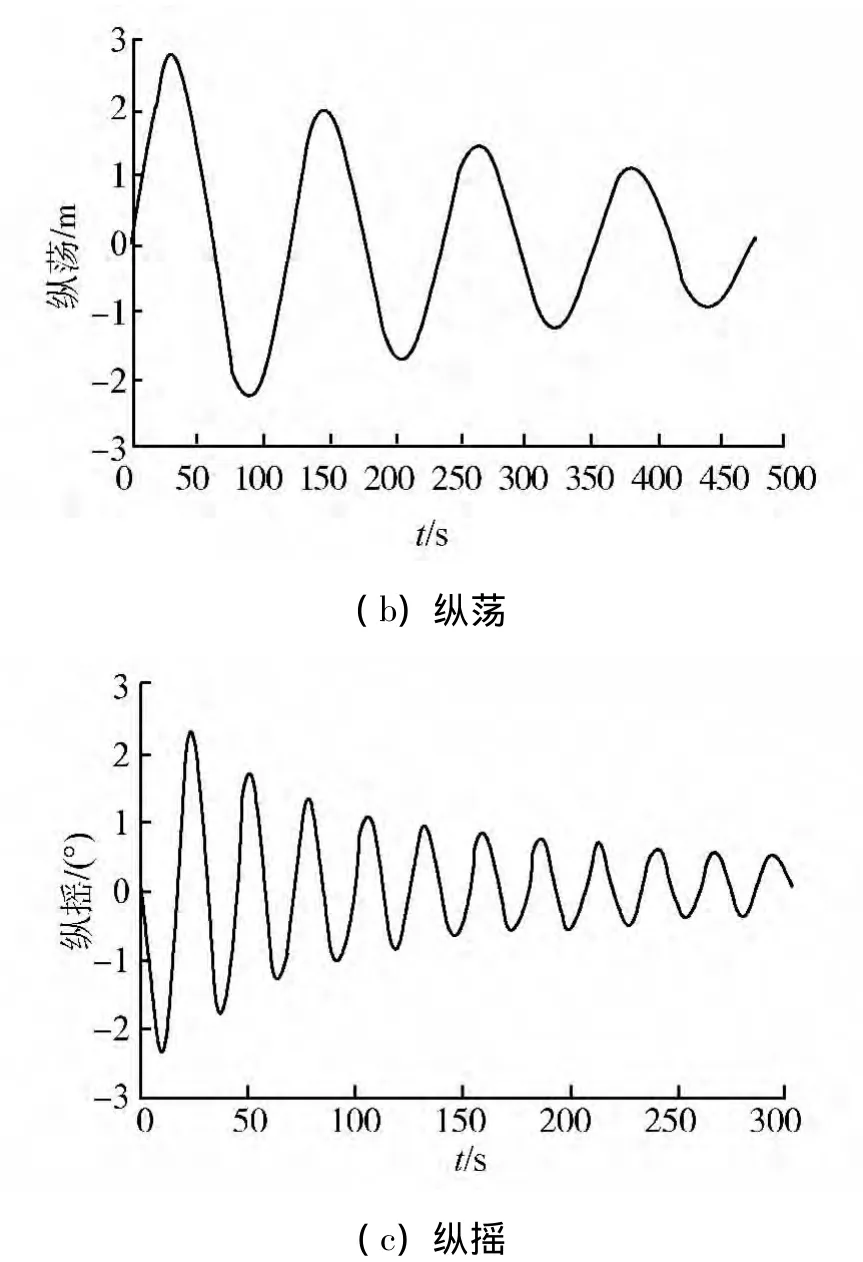
图3 衰减曲线Fig.3 Decay curves
由图3和表3可以看出,纵荡的固有周期与理论值吻合的较好,可求得纵荡无因次阻尼系数0.052。垂荡的固有周期要略小于理论值,垂荡无因次阻尼系数0.095。纵摇的固有周期比理论值稍大,误差主要来源于试验中叶片与轮毂的重量略大于理论值,纵摇无因次阻尼系数 0.061。

表3 固有周期Table 3 Natural periods
4.2 幅频响应曲线(RAOs)
浮式风机的幅频响应曲线RAOs如图4所示。
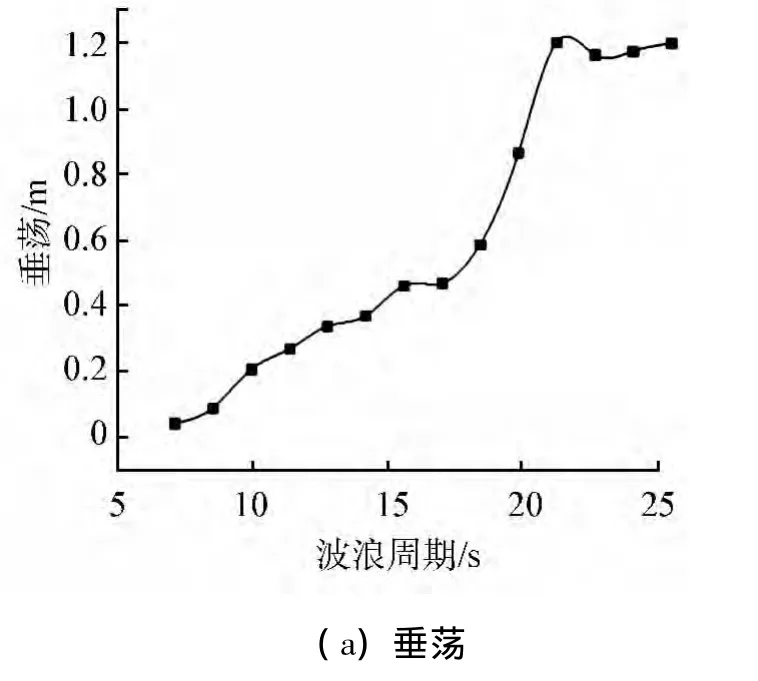
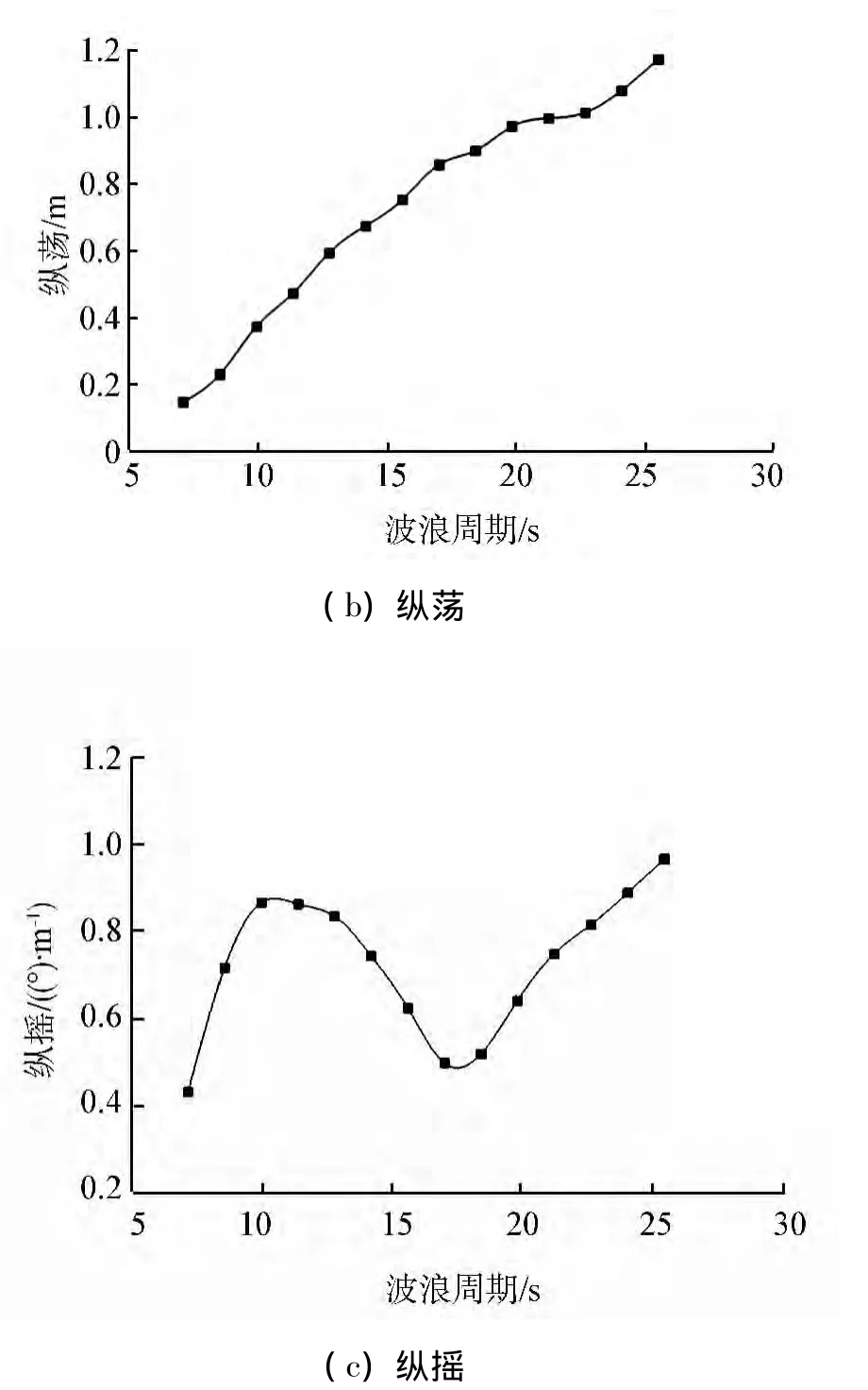
图4 幅频响应曲线Fig.4RAOs
由图4幅频响应曲线可看出,浮式风机的垂荡在波浪周期小于21 s时运动幅度逐渐最大,并在21 s是达到峰值1.18 m,之后稳定在1.1 m左右;在纵荡自由度上,运动幅度随周期的增大一直增大,基础在短周期波浪(高频)区域运动幅值较小,在周期25 s时运动幅值达到1.3 m,随波浪周期的增大运动响应变化基本呈线性变化;在纵摇自由度上,浮式风机运动幅度在波浪周期5~10 s有增大的趋势,之后逐渐减小,到17 s时达到最小为0.50°,之后随波浪周期增大而不断增大。
4.3 不同海况下的运动响应
改变风速、和波高,测试了不同海况下的浮式基础风机的运动响应,共测试了5组,限于篇幅所限,本文仅给出部分结果。
4.3.1 波浪作用的运动响应
波高5 m,波浪周期14.1 s,3个自由度的时间历程曲线如图5所示。针对以上时间历程曲线,进行频谱分析,结果如图6所示。由图5得到,浮式风机垂荡幅值 0.98 m,纵荡幅值 1.66 m,纵摇幅值 0.71°。从频谱分析图中可以看出,频谱图中的两个峰值点分别是在浮式风机固有频率和波浪频率处,结果吻合的较好。海况取波高5 m,波浪周期为7~25 s,浮式风机的运动响应曲线如图7所示。
图5 无风海况下的时间历程曲线Fig.5 Response history in the calm sea
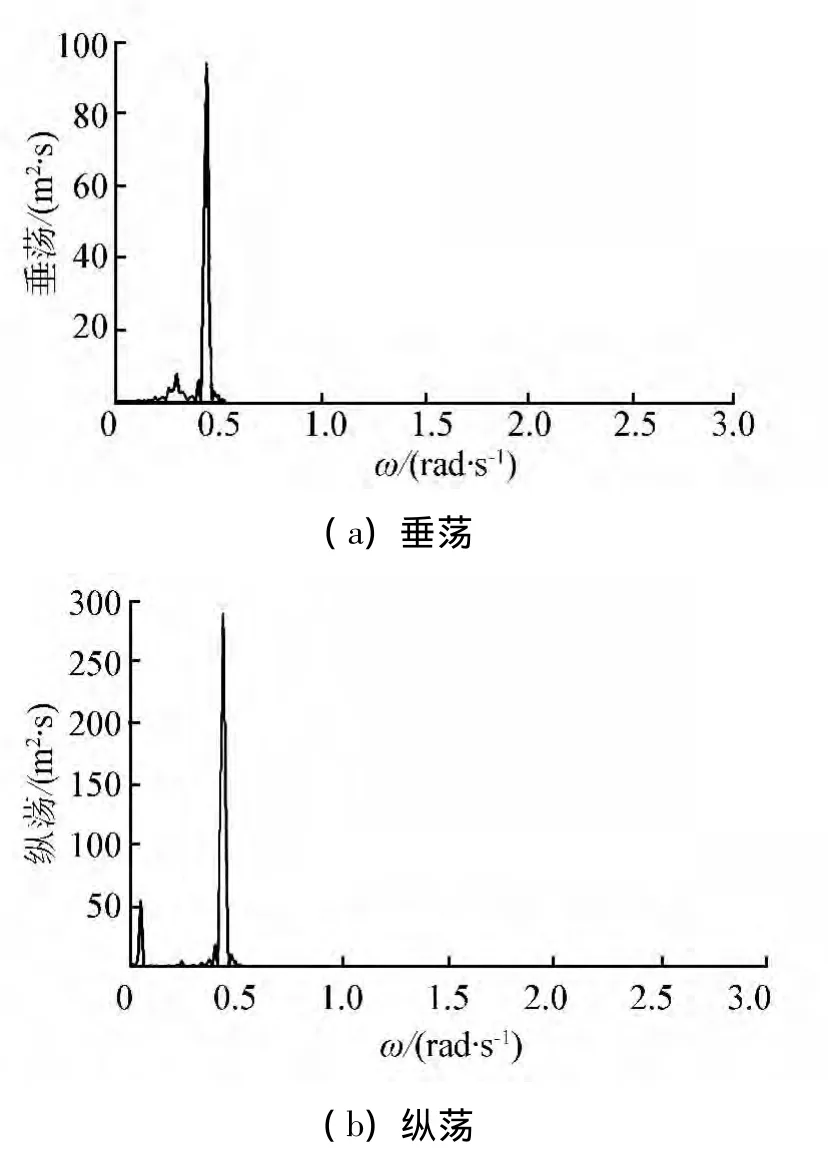

图6 无风海况下频谱图Fig.6 Spectrum without wind in the calm sea
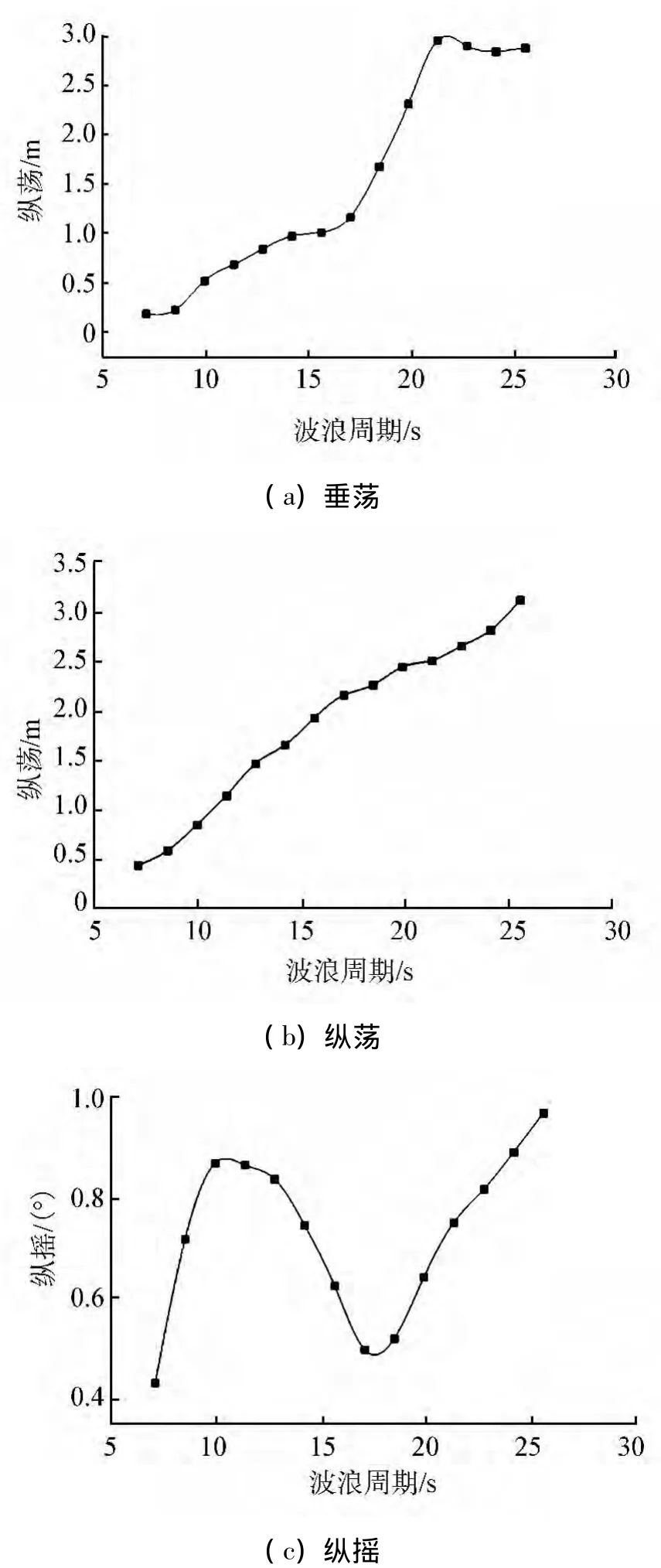
图7 无风海况下幅值响应曲线Fig.7 response in the calm sea
4.3.2 风浪联合作用的运动响应
取海况波高 5 m,波浪周期 14.1 s,风速 11.4 m/s,3个自由度的时间历程曲线如图8所示。
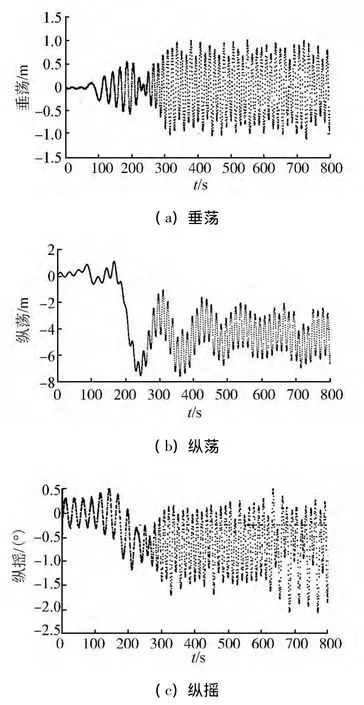
图8 11.4 m/s风速下的时间历程曲线Fig.8 Response history when the wind speed is 11.4 m/s
针对上述时间历程曲线进行频谱分析,得到如下结果。由图8可以得到,浮式风机垂荡幅值0.78 m,纵荡幅值1.66 m,纵摇幅值0.67°。从频谱分析图9中可以看出,频谱图中的两个峰值点分别是在浮式风机固有频率和波浪频率处,结果吻合的较好。海况取波高5 m,风速 11.4 m/s,波浪周期为7~25 s,浮式风机的运动响应曲线图10所示。

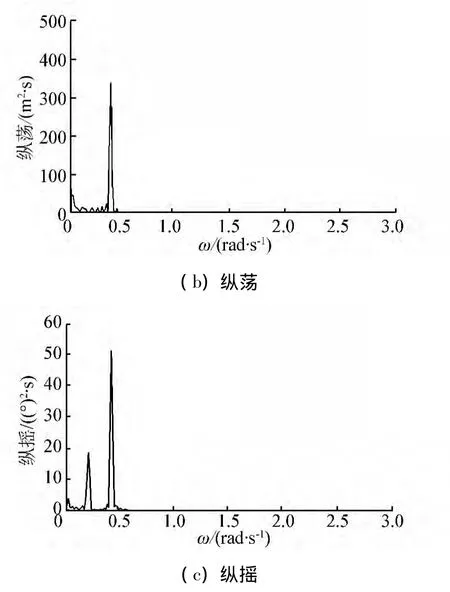
图9 11.4 m/s风速下的频谱图Fig.9 Spectrum when the wind speed is 11.4 m/s
从图10中可以看出,在定常风试验中,浮式风机的纵荡和垂荡运动响应曲线与无风试验结果基本保持一致;纵摇同样是随着波浪周期是增大-减小-增大的趋势。

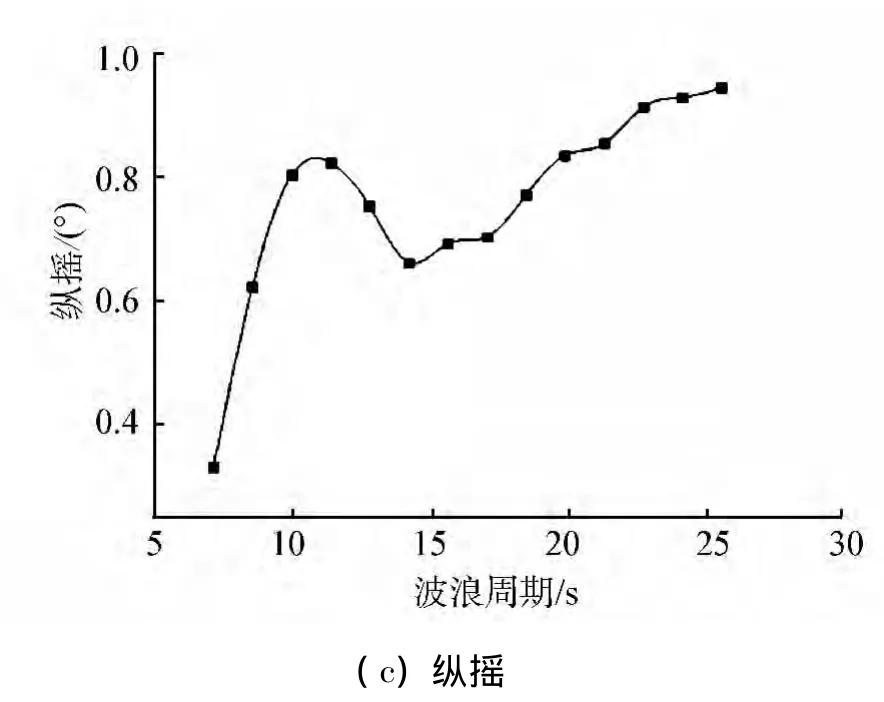
图10 11.4 m/s风速下的幅值响应曲线Fig.10 response when the wind speed is 11.4 m/s
通过以上2组试验,根据图7、10的结果对比,可以看出定常风对垂荡和纵荡几乎没有影响,在纵摇上,在短周期(高频)区域影响很小,在周期15 s之后,有风的纵摇幅值要明显大于无风时的纵摇。从表4中可以看出由风引起的纵摇占浮式风机纵摇的10%~40%。

表4 纵摇对比表Table 4 Comparison of pitch
5 结论
本文针对5 MW海上风机半潜型浮式基础进行模型试验研究,通过对结果的分析,得出以下结论:
1)通过自由衰减试验可以看出浮式风机的固有周期与理论值吻合的较好,并得到了3个自由度的无因次阻尼系数。
2)通过幅频响应曲线可以看出,3个自由度的运动响应均比较小,浮式风机运动性能良好。
3)定常风对浮式风机的垂荡和纵荡影响很小,对纵摇在波浪长周期处(低频)有较大影响,随着波浪周期和风速不同,影响在10%~40%。
[1]HYUNKYOUNG S,BYUNGCHEOL K.Motion of OC45 MW semi-submersible offshore wind turbine in irregular waves[C]//Proceedings of the ASME 2013 32nd International Conference on Ocean,Offshore and Arctic Engineering.Nantes,2013.
[2]NIELSEN F G,HANSON T D,SKAARE B.Integrated dynamicanalysis of floating offshore wind turbines[C]//Proceedings of the ASME 2006 25th International Conference on Offshore Mechanics and Arctic Engineering.Hamburg,Germany,2006:1-9.
[3]CHRISTIAN C,DOMINIQUE R.Windfloat:a floating foundation for offshore wind turbines[C]//Proceedings of the ASME 2009 28th International Conference on Ocean,Offshore and Arctic Engineering.Honolulu,ASME,2009.
[4]SHINADA K,MIYAKAWA M,ISHINARA T.A study on a semi-submersible floating offshore wind energy conversion system[C]//Proceedings of the Sixteenth International Offshore and Polar Engineering Conference.Lisbon,Portugal,2007:348-355.
[5]赵静,张亮.模型试验技术在海上浮式风电开发中的应用[J].中国电力,2011,44(9):55-60.ZHAO Jing,ZHANG Liang.Model test technology in the application of the floating foundation of wind power[J].E-lectric Power,2014,44(9):55-60.
[6]JONKMAN S,BUTTERFIELD W.Musial and G scott definition of a 5-MW reference wind turbine for offshore system development[R].NREL/TP-500-38060,2009.
[7]曹菡,唐友刚,陶海成,等.海上风机半潜型浮式基础设计及幅频运动特性研究[J].海洋工程,2013,31(2):61-67.CAO Han,TANG Yougang,TAO Haicheng,et al.Study on the design and frequency domain analysis of semi-submersible foundation for offshore wind turbine[J].The Ocean Engineering,2013,31(2):61-67.