一种高精度六轴运动平台设计*
2015-08-21潘绍飞肖世德
潘绍飞,肖世德
(西南交通大学机械工程学院,四川 成都 610000)
0 引言
多轴运动平台可以按照需求在给定运动范围内,实现多自由度运动,达到预计位姿,在工业生产和生活领域中应用比较广泛,尤其在汽车、飞机、船舶和娱乐设施等运动模拟方面,多轴运动平台已经成为必不可少的动态仿真设备。运动平台结构及运动形式的种类繁多,根据不同标准可对运动平台进行不同的分类。按运动平台具有的自由度个数,可分为单自由度、二自由度、三自由度、四自由度、五自由度、六白由度运动平台;按运动平台的结构形式,可分为串联式和并联式两种[1]。
以X单位的高精度六轴运动平台为研究对象,对其进行结构设计、控制方案和控制策略方面进行初步研究。所述运动平台为六自由度串联机构。
1 多轴运动平台总体方案和结构设计
1.1 设计要求
根据X单位的Y产品的运动控制需求,该多轴运动平台要求可以实现六个自由度的运动,X、Y、Z方向的直线运动,α、β、γ方向的旋转运动;X、Y轴方向直线运动行程500 mm,Z轴方向直线运动行程300 mm,α、β、γ 方向能够实现0 °到360 °的转动;Z、α、β、γ方向需要机械自锁;X、Y向重复定位精度小于5 μm,绝对定位精度小于 8 μm,最大速度 50 mm/s,Z向重复定位精度小于5 μm;绝对定位精度小于8 μm;最大速度 10 mm/s;α、β、γ 角重复定位精度 0.01°;绝对定位精度 0.02°;最大速度 10 °/s;各轴都需要加工运动反馈系统,X、Y、Z方向安装直线光栅尺,α、β、γ方向安装圆光栅尺;有效载荷大于30 kg。
1.2 结构布局
经过综合权衡和设计比选,六轴运动平台总体结构布局设计如图1所示。

图1 六轴运动平台整体结构图
该平台主要分为:X、Y、Z三个方向的直线运动部分和上方α、β、γ三个方向的转动部分。直线运动部分是由直线导轨、滚珠丝杠、滑块、基座等构成,从下到上,依次为X轴横向运动机构、Y轴纵向运动机构、Z轴竖向运动机构;Y轴运动机构固定在X轴运动机构的滑块上,Z轴运动机构固定在Y轴运动机构的滑块上。转动部分α轴运动机构固定在Z轴运动机构的滑动顶板上,β轴运动机构固定在α轴运动机构输出旋转框上。γ轴运动机构固定在α轴运动机构输出旋转杆上。最后执行靶标板安装在γ轴运动机构输出轴上。因此平台具备六轴运动能力。
1.3 驱动系统
考虑到驱动能力和控制精度等各个方面要求,最终选用日本松下400 W高惯量、小容量伺服电机,具体型号MHMD042G1V,电机额定转速3000 r/min,额定转矩1.3 N·m,有制动器,20位增量式旋转编码器,每一转的分辨率1048576。该电机具有响应速度快,定位稳定性高,输出扭矩恒定的特点。由于电机的额定转速较高,所以必须要减速机和电机配套使用。根据伺服电机的型号,选择伺服驱动器为MBDHT2510。运动平台共需要六台电机和六个驱动器。
1.4 传动系统
直线运动部分:X、Y轴动力装置由伺服电机、行星齿轮减速机和联轴器组成。X、Y方向均采用伺服电机和行星减速机输出旋转运动,带动滚珠丝杠机构控制滑块的往复行程,实现精确直线位移,两侧直线导轨起支撑和辅助运动,通过分别安装在X轴和Y轴方向的两个位移传感器实时反馈位置信息。Z向动力装置由伺服电机、蜗轮蜗杆减速机和联轴器组成。Z方向采用伺服电机和蜗轮蜗杆减速机输出旋转运动,带动滚珠丝杠机构控制滑块的往复行程,实现精确直线位移,两侧导杆起辅助运动作用,通过安装在Z轴方向的位移传感器实时反馈位置信息。
减速机在原动机和工作机或执行机构之间起匹配转速和传递转矩的一种相对精密机械,本设计中选用了蜗轮蜗杆减速机和行星减速机。蜗轮蜗杆减速机的主要特点是具有反向自锁功能,输入轴和输出轴不在同一轴线上,但是一般体积较大,传动效率不高,间隙不易消除,精度不高。行星减速机优点是结构较紧凑,回程间隙小、精度较高,但价格略贵。考虑到X、Y、Z方向都需要做高精度的直线运动,同时X、Y方向在运动过程中受到的轴向力方向是要改变的而Z方向受到的轴向力始终竖直向下。X、Y方向选择行星减速机,Z方向选择蜗轮蜗杆减速机。滚珠丝杠和直线导轨作为六轴运动平台所需的承载及运动部件,经过选型计算选择台湾上银FSI-C0级超高精密滚珠丝杠和台湾上银EGH-SP级超精密线性滑轨。
旋转运动部分:α、β、γ三个方向旋转机构动力装置由伺服电机、行星齿轮减速机和联轴器组成。三个方向均采用伺服电机和行星减速机输出旋转运动带工作部件转动,通过分别安装在α、β、γ三个方向上的位移传感器反馈位置信息。
1.5 反馈系统
六轴运动平台采用英国雷尼绍带细分的开放式光栅尺,测量X、Y、Z三个方向的位移,读数头型号为RGH41,分辨率 0.1 μm,钢质直线光栅尺型号为RGS40-S。
RGH41读数头具有反射带状光栅尺、专利光学滤波系统、LED安装指示灯、优异的抗污能力、较高的工作速度、结构紧凑、配有内置细分盒、能够提供一系列分辨率、工作速度高等优点。RGS40-S系列光栅尺表面具有一层可增强反射率的镀金薄层,光栅尺安装简单快捷,光栅尺截面尺寸非常小,光栅尺与基体的微差移动几乎为零。选用英国雷尼绍圆光栅尺,测量α、β、γ轴的旋转位移,读数头型号为RGH40,分辨率 0.1 μm,钢质圆光栅尺型号为 RESR40 系列[2]。
2 控制系统设计[3]
控制系统设计要求运动平台能够实现六个自由度运动的单独控制和组合联动控制,具备到位锁定功能,具备软、硬限位,具有状态指示、报警显示、保护功能;控制系统软件要能实现单独控制和组合联动控制,实现回原点、保护等功能,能自动生成标志点坐标。
基于上诉要求,控制系统选用研华原厂工控机IPC-610L,配合两张MPC08控制卡实现全闭环控制。X、Y、Z轴直线运动控制系统结构如图2所示,α、β、γ轴旋转运动控制系统结构如图3所示。

图2 X、Y、Z轴直线运动控制系统结构图
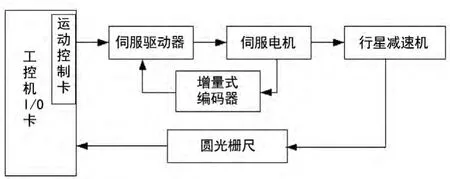
图3 α、β、γ轴旋转运动控制系统结构图
六轴运动平台是一个闭环控制系统,整个运动控制系统包括工控机、运动控制卡、伺服驱动器、伺服电机、编码器、减速机、滚珠丝杠、直线导轨、直线光栅尺、三相隔离变压器和驱动电源24VDC等组成。工控机通过PCI总线与运动控制卡相联系,运动控制卡获取光栅尺的检测位移信息,通过插补运算,控制六个伺服电机作旋转运动。伺服电机自带的增量式编码器对电机输出轴进行旋转角度位置检测和反馈,实现初步的位移和速度半闭环控制。MPC08运动控制卡接收到直线光栅尺和圆光栅尺的位移反馈信号,实现六个方向位移的全闭环精确控制。数字I/O卡选用带隔离的16路数字输入、16路继电器输出,用以实现直线机构速度、位置、超限和温度等信号监控,进行报警和制动。为了对控制机构的行程做出控制,在直线导轨上安装了行程开关以及限位开关,从而实现硬限位,避免超出运动极限范围。硬限位复位解锁功能通过控制系统软件编程实现。
3 控制策略与软件实现[4]
六轴运动平台对于各个方向的运动位移控制精度和安全可靠性都提出了很高的要求。在硬件设计上,为了满足机械自锁要求,六个伺服电机均需要附带机械刹车抱闸;为了满足绝对定位精度要求和重复定位精度要求,六轴均选择雷尼绍光栅,分辨率0.1 μm,同时直线光栅尺和圆光栅尺必须安装在各机构适当位置以实现六轴全闭环控制;行星减速机和蜗轮蜗杆减速机要求具备高传动精度,间歇要小。在软件设计上,控制软件设计时增加运动间隙(背隙)人机交互软件补偿调整功能,以便在六轴运动平台整机现场调试时候,可以根据光栅尺现场实时测量和标定实验数据,采用连续位移闭环控制策略和间歇补偿调整控制策略,通过控制系统软件处理实现实时补偿;加软限位开关控制,加光栅尺实时检测补偿,实现六个方向运动的单独控制和组合联动,每个轴具备到位锁定功能,具备软、硬限位,具有状态指示、报警显示、保护功能;具备位移曲线显示和当前位置标示功能。具备回原点、保护和限位复位解锁功能,具备自动生成标志点坐标等要求。
经过对控制系统和控制策略分析,设计出控制系统软件设计的主流程[5]如图4所示。

图4 控制系统软件设计的主流程
4 结语
对高精度六轴运动平台的总体方案和结构设计及其控制系统进行了初步研究,该多轴运动平台能够准确实现被控对象多自由度运动要求,同时能够很好地保证控制精度。在今后的工作中将进一步对平台的机械结构和控制策略进行细致研究和优化设计,以期完满实现X单位的多轴运动平台研制目标任务。
[1]邓瑞君,秦现生,张顺琦,等.运动平台应用研究新进展[J].航空制造技术,2010(2):51-53.
[2]杨国哲,王立平,郁鼎文,等.三坐标精密运动平台的设计[J].机床与液压,2006(6):1-3.
[3]吴 君.多轴运动控制系统的设计与应用[D].上海:上海交通大学,2011.
[4]施昕昕,常思勤.一种新型6自由度运动平台的控制研究[J].机械工程学报,2014(3):56-63.
[5]雷双江.烟流排管架单轴直线运动机构及其控制系统设计[D].成都:西南交通大学,2013.
