农用车辆自适应减振座椅悬架设计与仿真
2015-08-20方月
方月
摘要:针对农用车辆座椅结构简陋和减振效果差的问题,提出了1种基于磁流变阻尼器的自适应减振座椅悬架设计,通过控制器MCU实时处理座椅的加速度信号,再对励磁线圈的电流大小进行控制,从而实时调节阻尼力的大小,实现对座椅的减振。在磁流变阻尼器的励磁线圈中通入不同大小的电流,利用压力机对其进行了拉伸试验,获得阻尼力与位移的关系。通过试验值与理论计算值的比较,验证了利用控制器控制电流大小可以改变磁流变液的阻尼特性,大大提升了农用车辆座椅的减振效果。
关键词:农用车辆;减振座椅;磁流变阻尼器;悬架;磁路仿真;自适应
中图分类号: U463.33 文献标志码: A 文章编号:1002-1302(2015)07-0437-03
受市场需求、作业条件、空间结构和制造成本等因素的限制,国内多数农用车辆以及农用机械设备座椅均采用结构简陋的悬架或者刚性悬架[1-3]。刚性悬架座椅最为普遍,座椅的底部直接与驾驶室地板相连,二者之间没有加任何减振装置,此类座椅的结构简单,基本没有减振效果,且制造成本很低。在非公路条件下作业时,车辆的振动基本上是全部直接地传递给驾驶员,使驾驶员长时间承受低频、高强度的乘坐振动,严重地损害驾驶员的身心健康,极大地降低农业生产的作业效率[4]。随着现代化农业的需求和新型悬架生产成本的降低,改善农用车辆座椅悬架的隔振性能势在必行,很多新技术将应用于农用车辆,如将磁流变阻尼器应用到农用车辆上,使座椅具有减振效果和良好的舒适性,这种座椅可以降低农用车辆振动对驾驶员的直接振动作用,提高驾驶舒适性和操作稳定性。
1 自适应减振座椅悬架
1.1 自适应减振座椅悬架模型
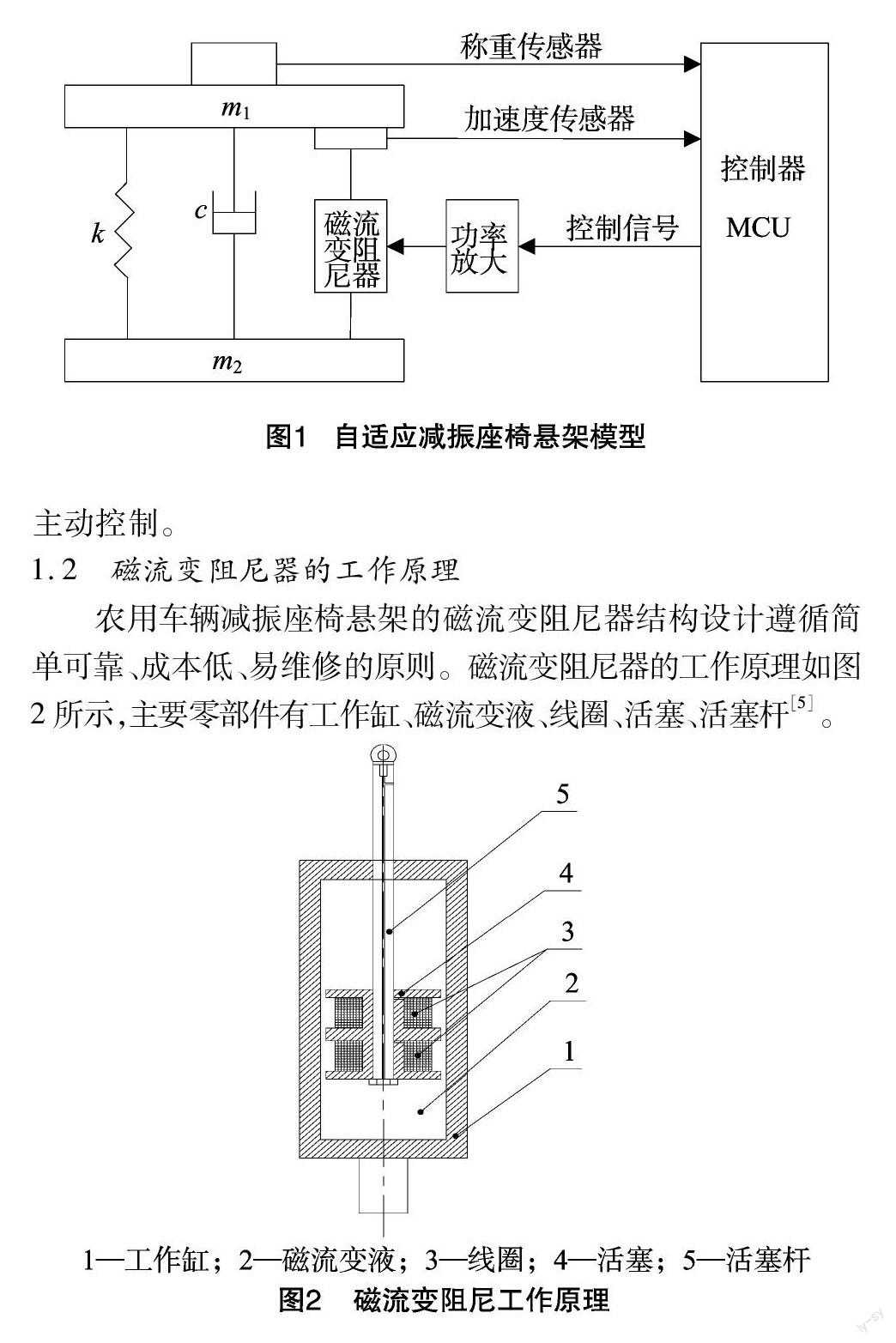
农用车辆自适应减振座椅悬架主要由控制器MCU、磁流变阻尼器c、加速度信号识别电路、称重传感器电路、具有阻尼特性的支撑弹簧k等组成,自适应减振座椅悬架模型如图1所示。座椅上的质量为m1,座椅的基座质量为m2。
自适应减振座椅悬架工作原理为:称重传感器检测座椅以上的质量信息,加速度传感器检测座椅的加速度,所采集的信号传递给控制器MCU,控制器对有效信号和干扰信号进行处理,计算出系统响应的阻尼值。控制器MCU发出的控制信号,通过功率放大器后调整励磁线圈中电流的大小变化,使阻尼间隙处的磁流变液中磁感应强度发生改变,迫使磁流变阻尼器产生需要的阻尼力,从而实现对自适应减振座椅悬架的主动控制。
1.2 磁流变阻尼器的工作原理
农用车辆减振座椅悬架的磁流变阻尼器结构设计遵循简单可靠、成本低、易维修的原则。磁流变阻尼器的工作原理如图2所示,主要零部件有工作缸、磁流变液、线圈、活塞、活塞杆[5]。
活塞将工作缸分成上腔体、下腔体,腔体内填充磁流变液,线圈缠绕在活塞凹槽中,线圈通过活塞杆的中心孔引出,在线圈中通过不同大小的电流,将会产生相应强度的磁场,磁流变液因为磁场的存在阻尼特性发生改变,活塞杆运动时所受的阻尼力随之改变,因此,通过调节电流值实现对磁流变阻尼器阻尼力的控制。
设计的自适应减振座椅悬架用磁流变阻尼器工作在剪切、流动2种模式下,故阻尼力F为这2种模式下阻尼力之和[6],公式如下:
F=6ηlA2pπRh3ν+6ηlApKhIN2hα。(1)
式(1)中:第1项数值与磁流变液的动力黏度有关,Ap=π(4R2-D2)/4,为有效面积环形面积,即活塞的面积减去活塞杆的面积,单位m2;R为活塞半径,单位m;η为不外加磁场时的零场黏度系数;l为阻尼孔的有效长度,单位m;h为阻尼孔的有效高度,单位m;ν为活塞速度[7],单位m/s;第2项数值与磁流变液的屈服强度有关,阻尼力大小具有可调节性;K、α是与磁流变液相关的常数;I为线圈通过的控制电流大小,单位A;N为线圈的匝数。由阻尼力F的计算公式可知阻尼力与控制电流之间存在单调递增的关系,电流大小影响阻尼力中的第2项,调节电流值可以对阻尼力有效控制[8]。
2 双级线圈磁流变阻尼器磁场仿真
由麦克斯韦电磁场理论可知,利用增大励磁電流和匝数的方法,可以增加磁路中总磁通量。但是针对磁流变阻尼器给定的励磁电流和磁阻,若直接采用增加线圈匝数的方法,会导致活塞窗口径向尺寸增大,从而使活塞整体结构变大。而采用在活塞上缠绕多个励磁线圈,可以增大磁通量,不但活塞有效长度会增大,而且磁路会变得更加均匀。通过分析ANSYS软件磁路仿真的结果,可以找出通过上、下线圈电流方向的最优状态,即为两级线圈同向电流与反向电流的比较。通过磁场理论计算,当施加电流大小为1.2 A时,磁流变液达到磁场强度饱和,双级线圈的上线圈匝数100,下线圈匝数100,电流大小为1.2 A。
2.1 磁流变阻尼器磁场仿真
在ANSYS电磁场仿真模块中建立磁流变阻尼器的二维轴对称磁路仿真模型,单元类型为PLANE53,网格为四边形网格。在给定的励磁线圈单元上施加电流大小为1.2 A电流密度载荷,同时有限元模型的在外围节点上施加磁力线平行边界条件,然后进行仿真求解后处理计算。由于磁力线的分布,阻尼孔附近的磁场强度对磁流变液的工作特性影响较大,故仿真结果主要关注磁力线分布特性、阻尼孔附近磁感应强度分布和磁场强度大小。
2.2 双级线圈反向等值电流仿真
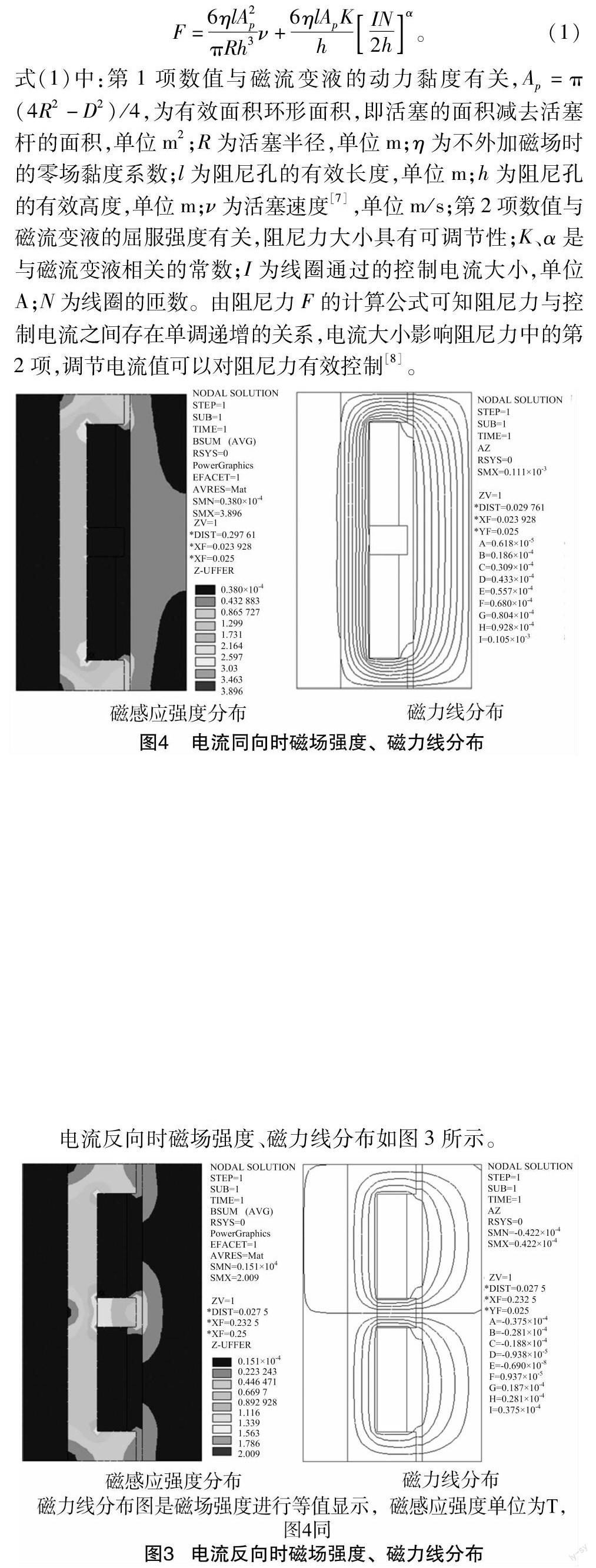
电流反向时磁场强度、磁力线分布如图3所示。
由图3可知,阻尼间隙处的磁场强度最大,双级线圈施加反向电流时,可以很好地体现磁流变液的剪切应力,两级励磁线圈方法可以对磁场的优化措施十分有效;而且在阻尼孔间隙处,磁力线不但垂直于活塞运动方向,而且磁力线在间隙处十分密集,磁感应强度在阻尼间隙处最大,这种状态有利于发挥磁流变液的阻尼特性。
在两级励磁线圈中通入反向等值电流时,在活塞与缸壁阻尼孔间隙处磁力线分布密度较大,两线圈间隙处磁力线互相叠加,很好地发挥了采用两级线圈增大磁通量的作用。
2.3 双级线圈同向等值电流仿真
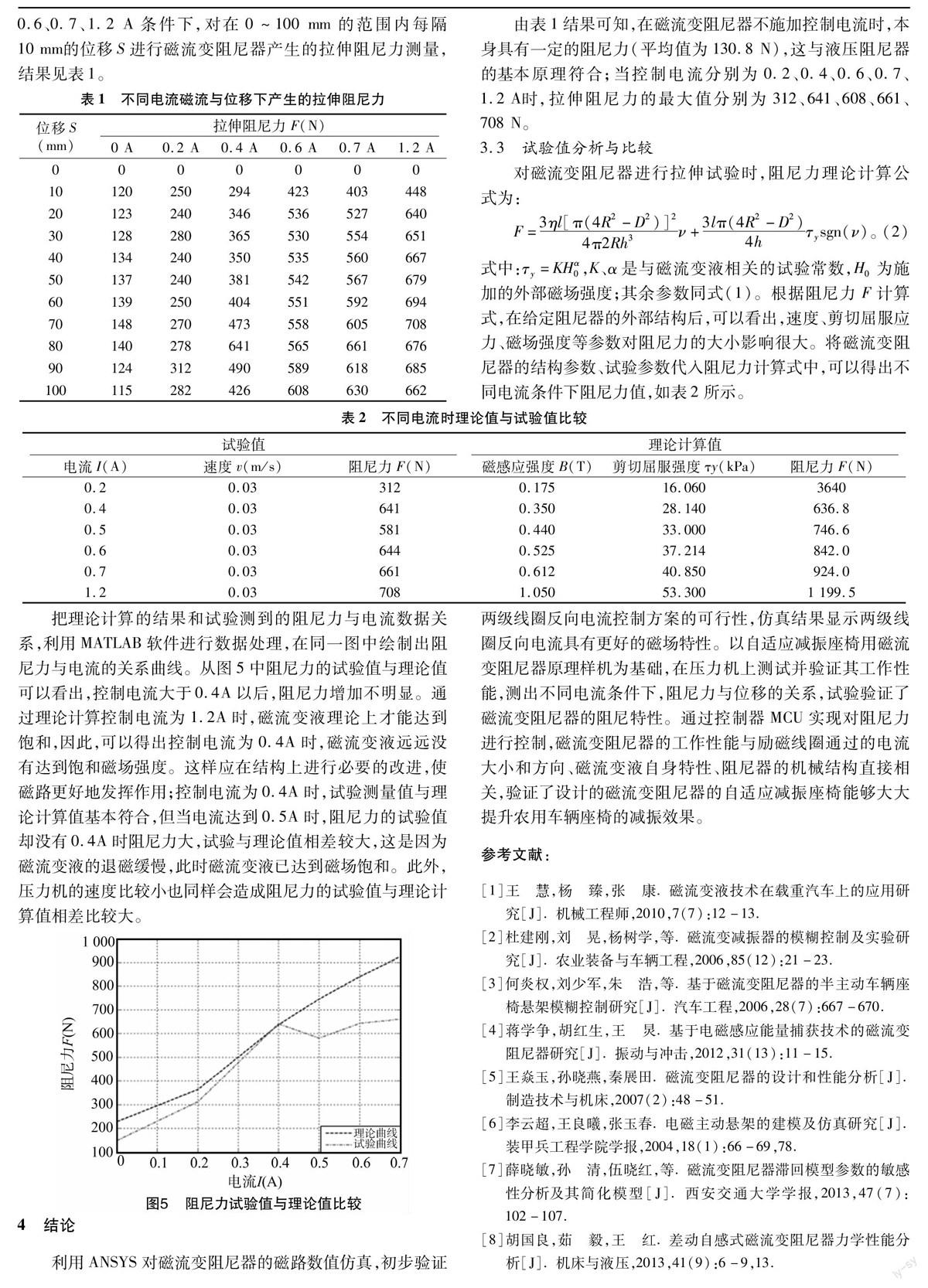
电流同向时磁场强度、磁力线分布如图4所示。
从图4可以看出,两级励磁线圈施加同向等值电流时,磁感应强度在上下间隙处最大,中部间隙处很小,基本没有磁感应强度,不如两级励磁线圈施加反向电流效果好。从磁力线分布图可以看出,磁力线在上下间隙处仍很密,中部间隙处没有磁力线,双级线圈同向电流不如反向电流磁场分布均匀,不利于磁流变液剪切阻尼特性的发挥。在两级励磁线圈中通入同向等值电流,两级线圈间隙处是相互抵消的,磁力线不通过两级线圈的间隙处,两级线圈间隙处没有磁力线分布,未能充分发挥两级线圈的作用。
3 磁流变阻尼器试验验证
为了验证基于磁流变阻尼器设计的农用车辆座椅的工作性能,通过拉压力试验为磁路结构、减振器的外部结构进行结构优化提供有力的数据依据。
3.1 试验测试方案
试验环境温度为10 ℃,压力机的工作行程为120 mm,活塞杆的测试速度为0.003 m/s。试验方向为垂直方向,从磁流变阻尼器的上端开始试验。将磁流变阻尼器下端固定在压力机上,设置上端口为运行端口,线圈的引出线与滑动变阻器及直流电源相连接,直流电源经功率放大器与控制器MCU相连接,通过线圈的控制电流值在0~1.2 A之间,依据试验步骤,同时改变加载电流的大小,运行1次记录1次数据。
3.2 不同电流时拉伸阻尼力与位移的关系
在进行磁流变阻尼器拉力试验时,在给定工作电流时,阻尼器产生相应的阻尼力;如果电流过大,不但电子控制装置容易烧毁,而且磁场很容易饱和,电流与阻尼力不再成线性比例关系。本次试验电流大小控制在0~1.2 A范围内,施加电压为12 V,输出功率为12 W。分别在控制电流I为0、0.2、0.4、0.6、0.7、1.2 A条件下,对在0~100 mm的范围内每隔 10 mm的位移S进行磁流变阻尼器产生的拉伸阻尼力测量,结果见表1。
由表1结果可知,在磁流变阻尼器不施加控制电流时,本身具有一定的阻尼力(平均值为130.8 N),这与液压阻尼器的基本原理符合;当控制电流分别为0.2、0.4、0.6、0.7、1.2 A时,拉伸阻尼力的最大值分别为312、641、608、661、708 N。
3.3 试验值分析与比较
对磁流变阻尼器进行拉伸试验时,阻尼力理论计算公式为:
F=3ηl[π(4R2-D2)]24π2Rh3ν+3lπ(4R2-D2)4hτysgn(ν)。(2)
式中:τy=KHα0,K、α是与磁流变液相关的试验常数,H0为施加的外部磁场强度;其余参数同式(1)。根据阻尼力F计算式,在给定阻尼器的外部结构后,可以看出,速度、剪切屈服应力、磁场强度等参数对阻尼力的大小影响很大。将磁流变阻尼器的结构参数、试验参数代入阻尼力计算式中,可以得出不同电流条件下阻尼力值,如表2所示。
把理论计算的结果和试验测到的阻尼力与电流数据关系,利用MATLAB软件进行数据处理,在同一图中绘制出阻尼力与电流的关系曲线。从图5中阻尼力的试验值与理论值可以看出,控制电流大于0.4A以后,阻尼力增加不明显。通过理论计算控制电流为1.2A时,磁流变液理论上才能达到饱和,因此,可以得出控制电流为0.4A时,磁流变液远远没有达到饱和磁场强度。这样应在结构上进行必要的改进,使磁路更好地发挥作用;控制电流为0.4A时,试验测量值与理论计算值基本符合,但当电流达到0.5A时,阻尼力的试验值却没有0.4A时阻尼力大,试验与理论值相差较大,这是因为磁流变液的退磁缓慢,此时磁流变液已达到磁场饱和。此外,压力机的速度比较小也同样会造成阻尼力的试验值与理论计算值相差比较大。
4 结论
利用ANSYS对磁流变阻尼器的磁路数值仿真,初步验证两级线圈反向电流控制方案的可行性,仿真结果显示两级线圈反向电流具有更好的磁场特性。以自适应减振座椅用磁流变阻尼器原理样机为基础,在压力機上测试并验证其工作性能,测出不同电流条件下,阻尼力与位移的关系,试验验证了磁流变阻尼器的阻尼特性。通过控制器MCU实现对阻尼力进行控制,磁流变阻尼器的工作性能与励磁线圈通过的电流大小和方向、磁流变液自身特性、阻尼器的机械结构直接相关,验证了设计的磁流变阻尼器的自适应减振座椅能够大大提升农用车辆座椅的减振效果。
参考文献:
[1]王 慧,杨 臻,张 康. 磁流变液技术在载重汽车上的应用研究[J]. 机械工程师,2010,7(7):12-13.
[2]杜建刚,刘 晃,杨树学,等. 磁流变减振器的模糊控制及实验研究[J]. 农业装备与车辆工程,2006,85(12):21-23.
[3]何炎权,刘少军,朱 浩,等. 基于磁流变阻尼器的半主动车辆座椅悬架模糊控制研究[J]. 汽车工程,2006,28(7):667-670.
[4]蒋学争,胡红生,王 炅. 基于电磁感应能量捕获技术的磁流变阻尼器研究[J]. 振动与冲击,2012,31(13):11-15.
[5]王焱玉,孙晓燕,秦展田. 磁流变阻尼器的设计和性能分析[J]. 制造技术与机床,2007(2):48-51.
[6]李云超,王良曦,张玉春. 电磁主动悬架的建模及仿真研究[J]. 装甲兵工程学院学报,2004,18(1):66-69,78.
[7]薛晓敏,孙 清,伍晓红,等. 磁流变阻尼器滞回模型参数的敏感性分析及其简化模型[J]. 西安交通大学学报,2013,47(7):102-107.
[8]胡国良,茹 毅,王 红. 差动自感式磁流变阻尼器力学性能分析[J]. 机床与液压,2013,41(9):6-9,13.