基于PID算法的喂线机速度控制系统设计
2015-08-20高美玲
高美玲
(黑龙江省冶金研究所,哈尔滨150040)
PID算法是一个闭环控制算法,它可以控制电机的转速,通过测量转速的传感器,将结果反馈到控制电路上,进行速度自整,使实际运行的速度和设定的速度保持一致,从而达到系统稳定。出于对喂线机生产精度的要求,对喂线机的调速系统应用PID算法,提高喂线机的喂丝精度。
1 设计方案
根据控制系统的要求,保证系统喂丝的精准度,设计调速子系统,设备调速的硬件结构示意图如图1所示。
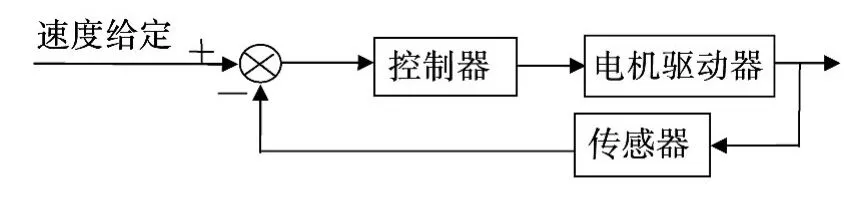
图1 设备调速的硬件结构示意图
调速子系统采用闭环控制,运用PID运算进行速度自整,通过传感器反馈速度信息与给定速度做比较得到偏差,经过PID算法,重新输入电机,使电机运行的实际速度与给定速度基本保持一致,实现系统稳定,提高喂丝精度。
2 PID算法实现原理
PID算法实现原理图如图2所示。图中,r(t)是给定的运行速度,y(t)是控制系统实际运行的速度值,e(t)是给定值与实际输出值比较得出的控制偏差,u(t)是经过PID运算得出的电机的输入值。
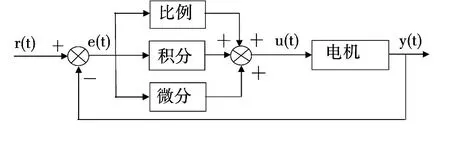
图2 PID算法实现原理图
(1)比例环节的作用是对偏差发生的瞬间做出快速反应,KP增大可减小系统稳态误差,提高控制精度。但KP的增大也会降低控制系统的稳定性,甚至会造成系统不稳定。
(2)微分环节的作用是阻止偏差的变化,微分环节有助于增加系统的稳定性,能够减小稳态误差,但微分作用能够放大噪声信号。
(3)积分环节的作用是把偏差的积累作为输出。积分环节可以提高系统的无差度,提高系统的稳态性能。比例环节与积分环节一起控制,能够达到既可使系统稳定又能提高无差度的目的。
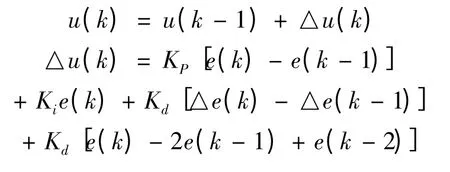
离散的PID表达式:
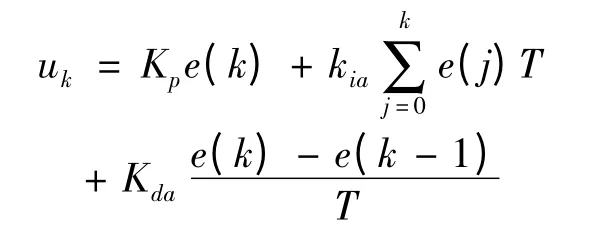
控制器输出的是每一步的增量△u(k),增量算式为:
3 得到PID参数
为了进行控制系统设计,需要对使用的电机进行建模,建模方法使用的是参数辨识,即测量电机对象的阶跃响应曲线,如图3所示。
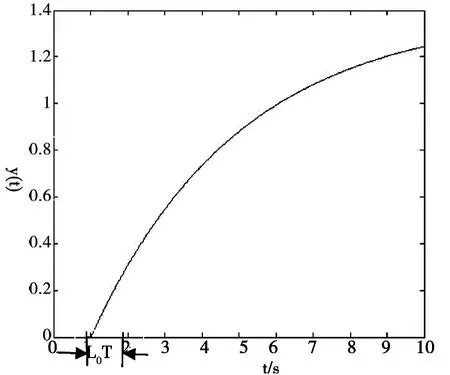
图3 飞升曲线
得到电机的传递函数表达式:

将电机的传递函数化简并写成典型环节形式:

从图3的飞升曲线上可得到以下几个点:

然后使用高桥参数整定方法:
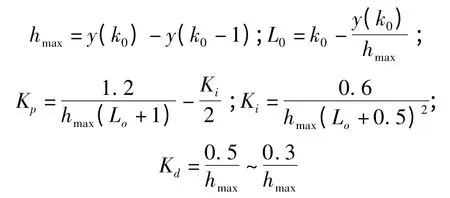
得到hmax=0.3074;k0=2。
得到如下PID参数:L0=1,Ki=0.8675,Kp=2.1687,Kd=0.9759~1.6265。
将高桥参数整定结果带入,simulink仿真图如图4所示。
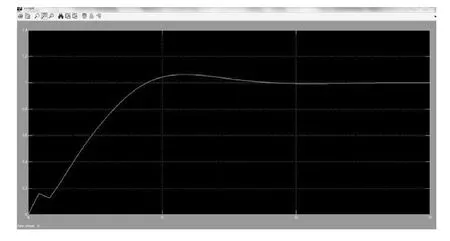
图4 高桥整定PID参数后的阶跃响应曲线
在高桥整定的基础上微调PID参数,得到特性更好的阶跃响应曲线,如图5所示。
图5 整定微调后飞升曲线
满足要求的PID参数为:Ki=0.9,Kp=3,Kd=1。
4 稳定性与快速性测试
4.1 稳定性测试
图6是未加PID的电机,能够看出电机是不稳定的。
图7是加PID调节之后的电机,可以看出是稳定的。
4.2 快速性测试
取图7中3个点(4.8,1)、(6,1.018)、(10,1),可以求得动态性能指标:
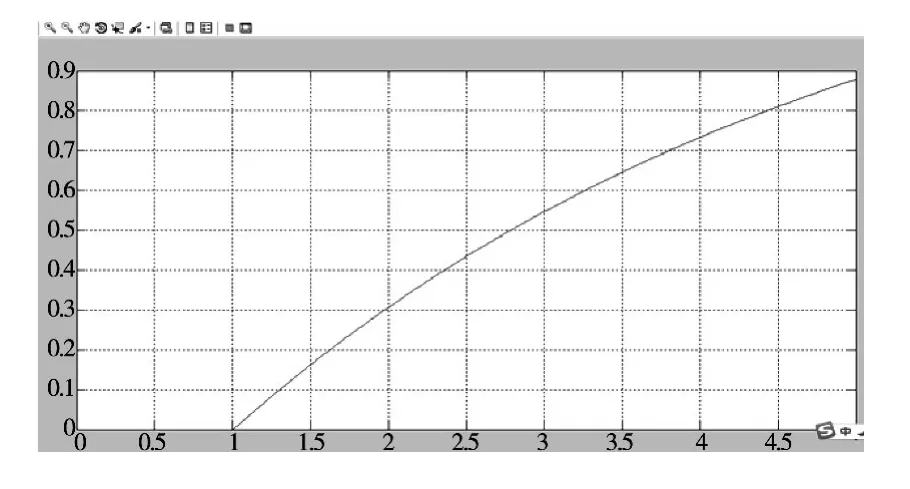
图6 未加PID的电机
上升时间4.8s;峰值时间6s;超调量(1.018-1)/1×100%=1.8%。
通过性能指标可以看出,通过PID运算,电机转速很快进入稳定状态,反应了系统的快速性。
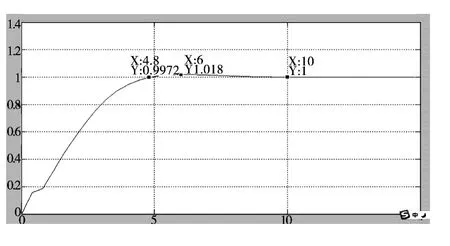
图7 加PID的电机
5 结语
通过应用PID运算,提高了系统的稳定性,提高了喂线机的喂丝精度,对PID远算进行了稳定性与快速性测试,结果表明PID算法应用于喂线机调速系统,能够使系统快速进入稳定状态,且稳定状态伴随生产过程全程。