基于单片机的自动缠线装置系统设计
2020-11-30董洢安
董洢安
(无锡职业技术学院,江苏 无锡214121)
在手工制作业中,生产者需要用到大量不同规格线板。传统情况下,单纯的依靠纯手工来制作线板,费时费力且生产成本高。传统缠线机虽然能够辅助人们进行缠线工作,但其主要投入于电机漆包线、电线绕制等工业生产中;且体积大,成本高,需要进行定期维护,无法满足手工业生产者的需求,因此,生产出一款高效、低成本、能够准确计数的新型智能缠线机就显得尤为重要。本文利用多种传感器,将小型减速电机与传感器结合,制造出一款体积小,成本低,缠线精确的新型缠线机,从而填补手工业自动缠线机的空白。
1 系统设计
智能缠线机系统主要由信号采集部分,控制单元,执行机构,可调式硬件组件组成。
信号采集部分主要是采集霍尔传感器传过来的脉冲值,并实时对传送的信息进行监测;控制单元采用高速、低功耗、超强抗干扰的STC12C5A60S2 单片机作为数据采集系统的控制核心,单片机利用外部中断对传来的脉冲值进行检测,并利用模糊算法算出缠线机已经实际完成的缠线圈数,一旦达到设定圈数,缠线机会做出语音提示,而一旦缠线机在工作过程中出现了问题,缠线机则会紧急制动并语音报警。
本系统主要使用霍尔传感器对缠线圈数进行检测;MPU6050 传感器对缠线机自身状态进行监测;USART HMI 液晶显示屏观察缠线机工作进程;薄膜键盘则实现对缠线机的控制。
1.1 信号采集系统设计
为了实现对缠线机的精确控制,本系统选择了霍尔传感器,并将霍尔传感器与电机加以改造使用。
缠线机将霍尔传感器与电机二者相结合,在电机底部的装上了一个圆形磁铁,随着电机转动,短轴上的磁铁也随之转动,根据霍尔效应,每当电机转过固定的距离,都会产生一个霍尔电压差,这个电压差回传给单片机,经过AD 转换之后,单片机通过算法确定其具体的实际圈数之后,控制单元将实际旋转圈数和预定设置的圈数进行比较,一旦达到我们设定的阈值,控制单元将给出一个停止信号,电机停止转动。
1.2 智能监控系统设计
作为一款辅助生产的工具,缠线机一定会在缠线过程中出现线板歪斜、缠线位置不准确等突发问题,为此,我们特别添加了实时监测系统,用陀螺仪实时监测缠线机的位置状态。
在旋转的情况下,物体旋转轴所指的方向在不受到外力影响时不会改变,陀螺仪也由此诞生。
缠线机在工作时会通过陀螺仪对自身情况进行实时监测,一旦发现自身在某一刻出现了较大程度的偏移,即判断为缠线机发生了意外情况,此时缠线机停止工作并且发出警报。
在实际的测试情况下,我们发现,由于缠线机在工作过程中产生的幅度不会太大,因此我们可以基本忽略缠线机自身产生的偏移,此外,一般情况下,使用者会将缠线机放置地比较平稳,基于大量实际实验,我们发现采用陀螺仪对缠线机进行监测是可行并有效的。
1.3 人机交互系统设计
在人机交互方面,本系统使用了USART HMI 液晶显示屏,成本低,寿命长,显示效果好,并且支持触控。使用者可以直观的在屏幕上观察到缠线机的现工作状态,达到对缠线机的监测要求。
缠线机的另外一个特点就是使用者可以根据自身不同的需求输入不同的工作参数,从而完成精确缠线的需求。为了满足对参数输入的需求,本系统使用了薄膜键盘,使用者可以直接在薄膜键盘上输入需要缠线机进行工作的圈数,并通过暂停、启动、清零、加速、减速五个按键对缠线机的工作状态进行控制。
2 电路设计
2.1 控制单元电路设计
控制单元是自动控制系统的核心,主要完成对传感器数据的检测、分析,判断缠线机实际转动圈数是否达到设定圈数、缠线机自身是否出现了紧急突发情况,一旦出现上述两种情况,缠线机停止工作并发出语音报警,提示人们上前查看。控制单元电路图如图1 所示。
2.2 阈值信号采集电路设计
阈值信号检测主要是包括对缠线机实际工作圈数、自身偏移的检测。采用霍尔传感器,通过对霍尔电压的采集,通过转换,计算缠线机的实际工作进程。采用MPU6050.6 轴传感器,对缠线机自身的瞬间位移偏转量进行检测。检测电路设计如图2所示。
2.3 语音提示系统
当缠线机完成设定阈值情况下的缠线工作时,控制单元会给语音提示系统一个信号,语音模块在接收到这个信号之后会做出提示,提示人们工作已经完成,叫人们上前查看。
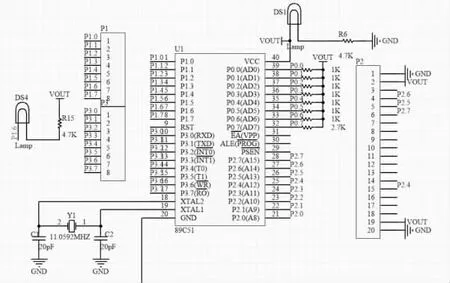
图1 控制单元
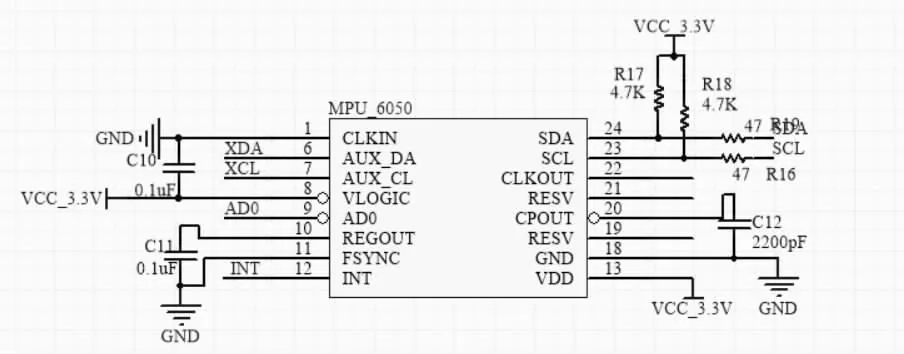
图2 检测电路设计
此外,陀螺仪实时对缠线机自身情况做出监测,当检测缠线机出现紧急情况时,控制单元也将发送信号,使语音提示系统做出相应的反馈。语音提示系统电路图如图3 所示。

图3 语音提示系统
2.4 驱动电路设计
执行机构的电机控制使用的是电机控制专用芯片L298N,其内部含有两个相同H 桥式驱动电路,以及4 通道逻辑驱动电路,即内含二个H 桥的高电压大电流双全桥式驱动器,分为由En A、IN1、IN2 控制的A 桥和由En B、IN3、IN4 控制的B 桥。具有驱动电流大(单路驱动约2A)、低电平范围宽等优点。四路光电耦合电路通过电- 光- 电的转换,对输入和输出电路进行隔离。电机驱动电路如图4 所示。
3 软件设计
3.1 程序流程设计
控制单元主要是针对单片机操作程序进行编程,包含传感器数据采集、分析、比较,阈值判定、驱动电机输出和语音报警。通过五个功能按键对系统进行启动、暂停、清零、加速、减速等操作以满足使用者对于缠线机的不同工作状态的需要,使用者通过薄膜键盘输入预定工作圈数,并通过显示屏幕实时观察缠线机工作状态。

图4 电机驱动电路
3.2 系统测试
系统整体测试组成如下图所示,系统针对不同型号的20 类缠线板,分别进行了20 次实验,缠线圈数不等,准确率达到了99.8%。此外在连续14 小时的工作情况下,缠线机依旧保持着极高的稳定性。以上测试表明,该系统可以有效辅助人们的日常生产生活。具体参数见下表。
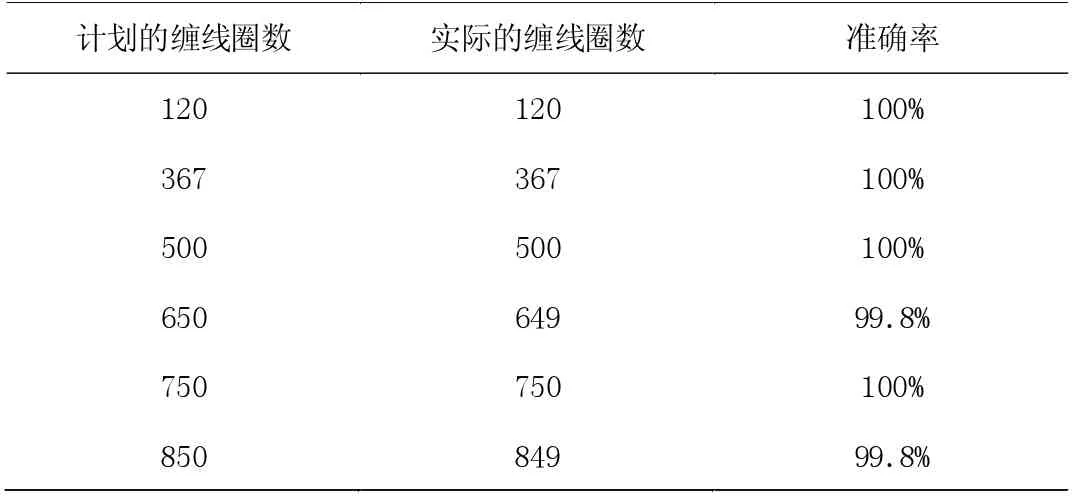
测试表
4 结论
本文设计了智能缠线装置系统,通过多种传感器角度,检测机器实际缠线圈数并监测缠线机自身状态,从而辅助人们的日常生产生活,本系统设计为提高手工制作业的自动缠线的智能控制系统设计提供了重要的参考依据。
