车路协同仿真场景设计与实现
2015-08-17崔琳娜吴克寿
崔琳娜,吴克寿
(厦门理工学院计算机信息与工程学院,福建 厦门 361024)
车路协同仿真场景设计与实现
崔琳娜,吴克寿
(厦门理工学院计算机信息与工程学院,福建 厦门 361024)
为改善道路安全、提高交通效率并实现智慧交通,提出一种基于多智能体的车辆自组网络和路侧无线感知网络的车路协同系统混合架构.该架构中每台车和各重要路口的信号灯均为多智能体,包含路侧终端、车载终端和行人探测器,通过无线通信网络实现人-车-路信号互联,全方位感知周围环境信息.用TransModeler对厦门市某区域进行仿真,结果表明:该架构可以准确、全面地感知道路环境,采集交通事故信息,反映全路网运行状况,并可依据仿真结果对交通异常情况进行预测和判定,为路网的安全运行提供有力的参考.
车辆自组网络;多智能体;车路协同;TransModeler;智能交通
车路协同系统(cooperativevehiclesinfrastructuresystem,CVIS)是用来实现车载设备与路侧系统以及周边车载设备通信的前沿技术.通过CVIS,车辆能更好地感知周围环境,接受协助驾驶的重要信息,道路监管部门能更迅速地处理交通事故并将车流从事故区域疏散[1].国际上,车路协同系统主要有美国的VII,IntelliDrive,欧盟的SafeSpot,Coopers,eSafety,日本的Smartcar,Smartway等[2-3].车路协同技术的关键是实现车与车之间和车与路之间的通信.车路通信即在路侧间隔设置路侧通信单元(road side unit,RSU),形成路侧无线通信网.车车通信即通过建立车辆自组网络(vehicular ad-hoc network,VANET)实现车辆跟驰和防撞预警[4].VANET中实现车车、车路通信方式有:ZigBee,GPRS,WiMAX,WiFi和专用短程通信技术(DSRC)等[5].现阶段国内一些研究人员设计车联网系统时,利用DSRC实现车车、车路信息的传输,采用3G/4G、WiFi、GPS、WiMAX实现车-中心和路-中心的通信[6],但因尚未考虑到路侧行人探测器控制和适用于车路协同的多种传感器的接入,而不能满足实际工程的需要.本文结合多智能体对车路协同模型做进一步改进,提出车辆专用通信网络和路侧无线传感网络混合的基于多智能体的CVIS架构,通过多智能体对CVIS进行分布式的协同自适应控制.
1 多智能体车路协同系统模型

多智能体系统是由多个可计算的智能体组成的集合,多智能体具有模块化、扩展性好的特点,因而适合于应用到分散性大、复杂度高的交通控制网络[7-8].本文设计的车路协同模型由基于多智能体的车载控制单元(on board unit,OBU),路侧通信单元(road-side unit,RSU),基于多智能体的路侧基础设施(road-side infrastructure,RSI),传感器节点(sensor node,SN),交通故障探测器(accident investigator node,AIN)5部分组成.
每台车上装载基于多智能体的车载控制单元OBU,路侧配置路侧通信单元RSU,车车间车路间的通信采用基于IEEE 802.11p的DSRC,并由此构成VANET车辆自组网络.VANET的主要功能:通过检测车速以及车辆的位置坐标是否与调度相符来保证道路安全,并可解决小型车辆因被大型车辆遮挡而不能与路侧通信设备通信的问题.某一区域感知到的信息被分布式地存储在冗余的传感器节点中并传递给朝这一区域靠近的车辆,以此在VANET中传递危险警示信息.基于多智能体的车路协同系统如图1所示.
此种架构将会面临如下问题:因VANET中作为网络节点的车辆的行驶速度不同而导致网络的拓扑结构快速变化,进而导致车辆间的通信不能稳定存在.针对上述问题,对DSRC作分析得出如下结果:DSRC的物理层(PHY)和数据链路层(MAC)应采用车辆环境无线访问协议WAVE.WAVE由IEEE 802.11 p和IEEE1609协议栈2部分组成.使用DSRC,V2V和V2I之间的通信连接可在50 ms以内,从而满足安全类信息需在100 ms内完成传输的要求[9].
无线传感网(wireless sensor network,WSN)中的传感器分为交通信息监测器和交通故障探测器(AIN)以及行人探测器(pedestrian detection sensors,PDS).交通故障探测器一旦探测到交通事故,会立刻通过WSN将信息发送给附近车辆,提醒向事故地点靠近的车辆绕行,以缓解交通拥堵.行人探测器检测到过街行人并将信息传递给路口附近车辆,车上搭载的OBU接收信息后会提醒驾驶者减速以使车路协同系统更加安全智能.WSN显著扩大了车辆的感知范围,车主能够对环境变化做出快速反应以保证车辆的安全.
2 车路协同中多智能体的控制结构
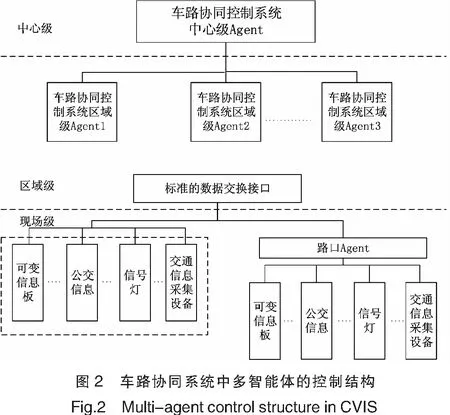
本文以具有智能性和适应性的Agent为基本组成,以“递阶集散”的协同模式来实现各Agent的动态响应和动态组合,Agent集中与分散相结合,实现信息的快速流通与周转,实现车路协同系统的协同实施.这里“递阶集散”是指在垂直空间按照Agent的功能把实施分解到不同的层次上;在水平空间通过对Agent进行智能集散将实施分解到不同子区中,并通过Agent之间的协同来实现系统的管理任务和目标.采用“递阶集散”的协同实施模式,每一个交叉口都是一个Agent,协同Agent按照全局优化的观点来裁决,化解相邻交叉口的冲突.根据车路协同系统的分布式层次结构的特征,基于Multi-Agent的车路协同系统采用“递阶集散”的层次结构如图2所示.
中心级由中心控制Agent组成,根据路网结构特征、交通流预测等交通影响因素,对交通运行状况作出评估,协同交通控制系统和交通流诱导系统,监控和指导区域Agent的运行.区域Agent的主要功能有:协同子区内的交通控制与诱导,接收区域间协同Agent的指令,完成信息的上传下达.路口执行Agent根据来自检测器的实时交通检测数据分析处理结果及子区协同层的协同控制指示,确定适当的策略,优化设计和调整对应路口的信号配时方案和诱导策略.通过对路口执行Agent对单个交通信号对象控制,实现CVIS协同控制.
3 仿真与结果
利用智能交通仿真软件TransModeler3.0构建厦门市某区域路网并分别建立传统环境下和车路协同环境下的仿真场景模型,该模型包括6个交叉路口和7个路段,路网建模区域如图3所示.

首先采集了路段名称,车道宽度,车道数,人行横道的宽度和位置,交叉口、出入口的位置及其间距等几何数据.其次收集了道路限速信息,交叉口控制信息和控制特点(信号配时、绿信比、是否有左转信号灯等),交通标志,饱和流量和理论饱和流量信息等运营数据.最后从google earth中导入仿真底图,再基于采集的几何数据和运营数据构建仿真路网.以某日该路段的实际观测交通流量信息作为模型中OD矩阵的初始数据信息,如表1所示.

表1 市政府周边路段交通流量表
OD矩阵由表1中的数据经全有全无法OD反推得到,即首先依据交通流量表数据得到初始OD矩阵,随后依据全有全无法得到反推后的OD矩阵.OD矩阵反推是根据关键路段的交通量数据来推算或更新OD矩阵.本文所采用的OD反推是在Nielsen的OD反推模型的基础上进行完善后得到的,其本质是将交通量看作随机变量,并与交通分配方法相结合,采用迭代的方式,在交通分配阶段和OD矩阵估计阶段反复循环,直到2次分配间的误差在指定的阈值范围内.初始OD矩阵和反推后得到的OD矩阵如表2和表3所示.

表2 初始OD矩阵

表3 反推后得到的OD矩阵
传统环境下的交通信号配时采用定时信号控制如表4所示.

表4 传统环境下的交通信号配时
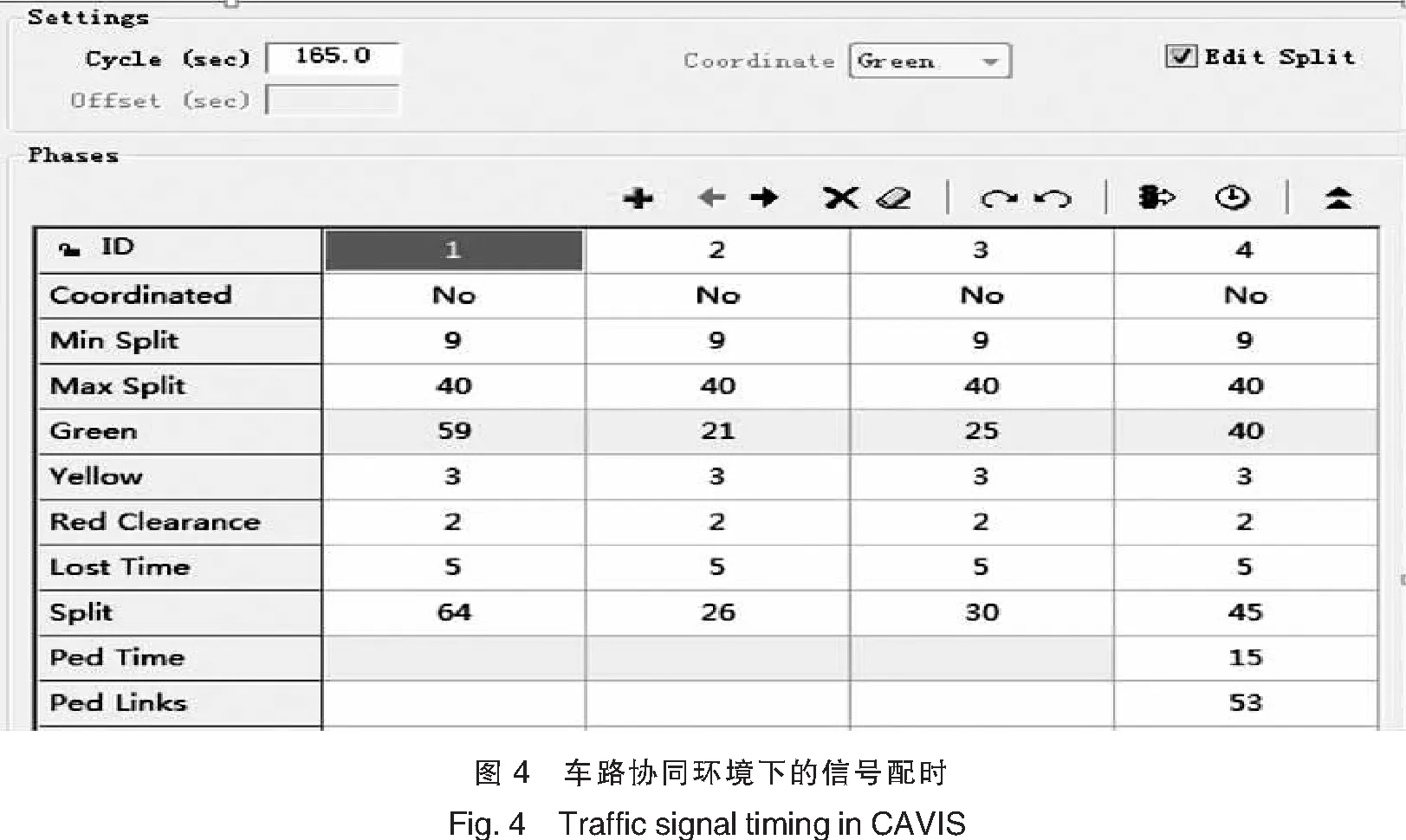
车路协同环境下信号控制为:每个信号灯都是一个多智能体,在车路协同下能够实时的感知路口的交通流量信息变化,依据这些信息对信号灯的信号配时进行韦伯斯特信号配时优化,即根据实际到达交通量,利用韦伯斯特最佳周期公式计算出周期时长后,利用饱和比给各个相位分配最佳绿灯时间,即
(1)
式(1)中:Y为相位关键流量比之和.优化后的信号配时结果如图4所示.图4中coordinated一行是指是否使用绿波效应协同,本文并未使用绿波效应,因此显示为No.
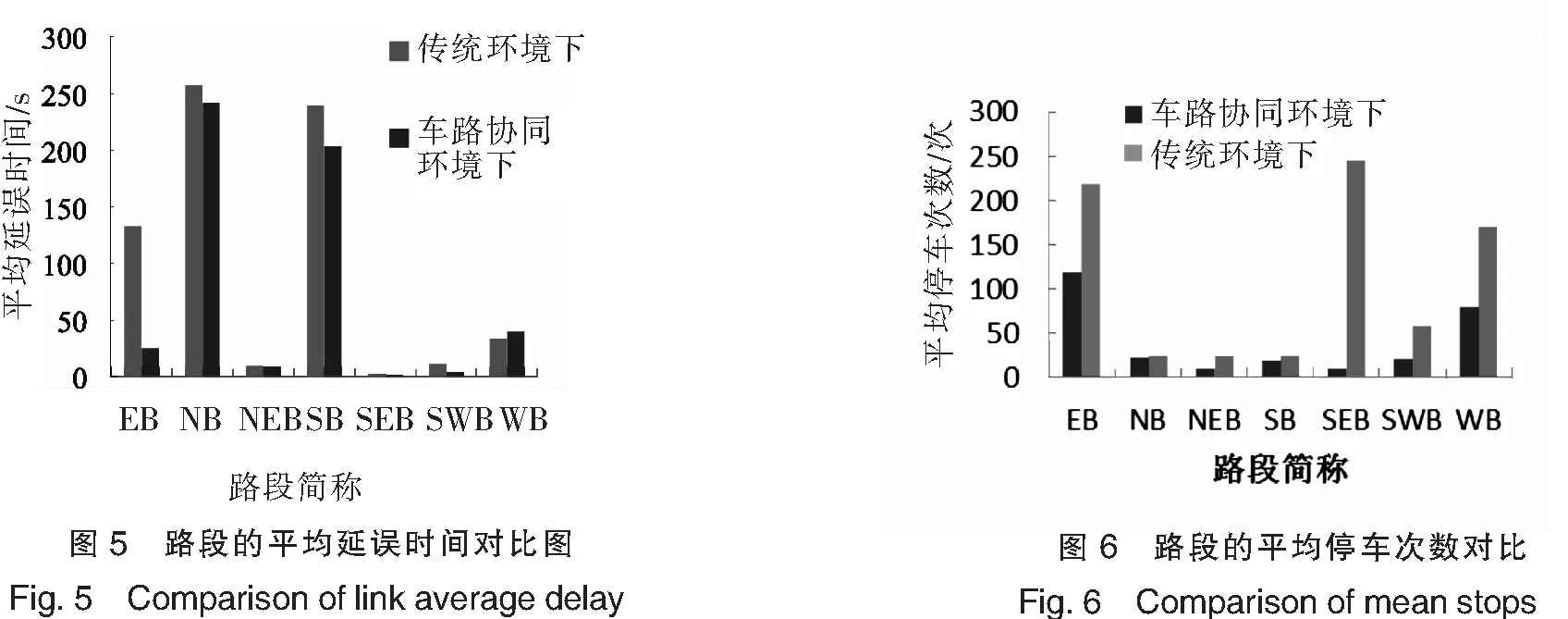
为对比分析传统环境下和车路协同下路段拥堵状况、平均延误时间和停车次数,分别在早高峰,晚高峰及平峰期3种路段状态下对2种路段模型进行仿真,时间均为1 h.两种模型下某一时刻的交通拥堵情况、各个路段的平均延误时间和停车次数如图5~6所示.
在传统环境下,车辆密度分布很不均匀,且某一路段F的拥堵已经延伸到G路段,并有延伸到相邻区域的趋势.而在车路协同环境下,虽然与拥堵车道相邻路段B车辆密度有一定上升,但是与外界相连的G,D段车流密度有明显下降,仿真片区边缘路段车流密度降低,道路畅通.
通过仿真可知,与传统环境相比,基于多智能体的车路协同环境下整体路段车辆出行的平均延误时间降低23%,车辆平均停车次数降低48%,车辆在各个路段中的分布更为均匀,路段边缘区域的车流密度更小,且某一区域的拥堵不会对相邻区域造成压力,拥堵可以集中并化解在更小的范围内.交警可以集中对拥堵路段疏导,缩短疏导拥堵时间,减少因为道路拥堵造成的经济损失.
4 结论
本文使用TransModeler仿真软件设计了基于多智能体的车路协同交通仿真平台,在该平台上对信号配时进行韦伯斯特信号配时优化与交通信号控制未优化以及无车路协同的仿真数据进行对比,结果表明基于多智能体和车路协同的信号控制模型具有更好的适应性与交通控制效率.在CVIS下,车辆在各个路段的延误和停车次数要明显低于传统环境.CVIS可以全方位地收集道路信息为多智能体所用从而使道路交通更加安全智能,可以使道路交通分布更加均匀,充分利用现有的道路资源并缓解交通拥堵.
[1]张含,蔡伯根,李四辉.基于多分辨率建模的车路协同系统仿真场景设计与实现[J].系统仿真技术,2013,9(1):52-60.
[2]杨帆,云美萍,杨晓光,等.车路协同系统下多智能体微观交通流模型 [J].同济大学学报:自然科学版,2012,40(8):1189-1196.
[3]张存保,陈超,严新平.基于车路协同的单点信号控制优化方法和模型 [J].武汉理工大学学报,2012,34(10):74-79.
[4]HAFNER M R,CUNNINGHAM D,CAMINITI L,et al.Cooperative collision avoidance at intersections:Algorithms and experiments[J].IEEE Transactions on Intelligent Transportation Systems,2013(3):1162-1175.
[5]YIN Xiao-yan,MA Xiao-min,TRIVEDI K S.An interacting stochastic models approach for the performance evaluation of DSRC vehicular safety communication[J].IEEE Transactions on Computers,2013,62(5):873-885.
[6]张和生,张明洋,孙伟.基于IEEE802.11p高速车路通信环境研究[J].仪器仪表学报,2013,34(5):1181-1187.
[7]黄艳国,罗强,许伦辉.基于多智能体的城市交通区域协调控制方法[J].武汉理工大学学报:交通科学与工程版,2010,34(2):409-412.
[8]ERNST T,NEB EHAJ V,SRASEN R.CVIS:CALM proof of concept preliminary results[J].9th International Conference on Intelligent Transport Systems Telecommunications,2009,19(5):80-85.
[9]黄罗毅,吴志周,杨晓光,等.基于仿真的IEEE 802.11p在车路协同中的适应性研究 [J].交通信息与安全,2011,29(3):123-126.
(责任编辑李宁)
CVIS Scenario Design and Implementation
CUI Lin-na,WU Ke-shou
(School of Computer and Information Engineering,Xiamen University of Technology,Xiamen 361024,China)
In order to make safer,faster and smarter roads,a hybrid cooperative vehicles infrastructure system(CVIS) architecture that combines Vehicular ad-hoc networks based on multi-agent and roadside wireless sensor networks was proposed.All cars and major intersection lights in the architecture are multi-agent based,including road-side units,car terminal and pedestrian detectors to achieve people-vehicle-road connection and to perceive comprehensive information of the surrounding environment through the wireless communication network.TransModeler simulation of an area in Xiamen shows that the architecture can accurately sense the road environment,collect accident information,reflect the operation of the road network,and predict and determine traffic anomalies based on the simulation results,thus providing convincible references for the safe operation of road network.
VANET;multi-agent;CVIS;TransModeler;ITS
2014-09-21
2014-11-06
崔琳娜(1990-),女,硕士研究生,研究方向为电器智能化,智能交通仿真.通讯作者:吴克寿(1975-),男,教授,博士,研究方向为软件体系结构,嵌入式系统安全.E-mail:kswu@xmut.edu.cn
U491.54;TP391.9A
1673-4432(2015)01-0051-06
