新型增程式公交车动力系统优化与仿真
2015-08-17俞剑斌马腾腾陈峰磊杨云东
李 勇,俞剑斌,马腾腾,陈峰磊,杨云东
(厦门理工学院机械与汽车工程学院,福建 厦门 361024)
新型增程式公交车动力系统优化与仿真
李勇,俞剑斌,马腾腾,陈峰磊,杨云东
(厦门理工学院机械与汽车工程学院,福建 厦门 361024)
针对无变速箱结构的增程式公交车存在电机工作转速范围窄、爬坡能力及制动能回收效率低的问题,设计了具有二挡自动变速箱的增程式公交车动力系统,并对其进行结构分析和主要参数匹配.采用CRUISE/Simulink联合仿真平台,对设计的动力系统及控制策略进行了仿真验证.结果表明:整车动力系统设计及参数匹配较合理,能实现电机需求扭矩的减小并有效延长续驶里程,提高制动能回收效率.
增程式公交车;动力系统;二挡自动变速箱;爬坡能力
面对日益严峻的石油危机和环境污染,我国高度重视新能源汽车的发展,其已经成为国家重点发展战略[1-4].从现有新能源汽车发展趋势看,纯电动汽车将是未来发展趋势.但由于动力电池组在技术和成本方面的限制,纯电动汽车存在续驶里程短的缺点,使其在产业化进程中发展缓慢.增程式电动汽车在纯电动车基础上增加一个增程器,能够较好地弥补现有纯电动汽车续驶里程短的不足.目前国内关于增程式电动汽车的相关研究较多,如昆明理工大学的李涛等,江苏理工学院的孙奎洲等分别对增程式电动车动力进行系统设计和参数匹配,以提高整车动力性和经济性[5-7].但无论是对增程式公交车的文献研究还是生产的实车大多没有变速箱结构,具有如下缺点:1)由于电机直接作用于驱动轴上,电机的工作转速范围较窄、效率不高;2)对于复杂地形或陡坡路况车辆难以驱动;3)制动能量回收效率不高.基于以上分析,本文在现有增程式公交车的基础上增加二挡自动变速箱和超级电容组成新的增程式公交车构型,以弥补传统增程式公交车构型的不足[8-9].
1 整车构型及参数

增程式公交车的构型如图1所示,主要由驱动电机、辅助动力装置(auxiliary power unit,APU)、电储能系统、变速箱组成.其中电储能系统由超级电容和动力电池组构成,APU由发动机和发电机组成.发动机不直接参与传动,APU主要是为了提高汽车的续驶里程以及在大功率需求时联合动力电池给驱动电机提供能量.
相对传统的增程式公交车,该构型增加了超级电容及变速箱.超级电容能够在加速、爬坡等大电流需求工况时,辅助电池为驱动电机提供能量,避免电池的大电流放电,并且在制动能量回收时作为储能装置,避免公交车在城市工况下频繁制动时能量回收对电池造成的损害,因而能够延长电池使用时间.采用二挡自动变速箱能够拓宽电机的工作转速,并且能够提高电制动力矩,从而提高制动能量回收效率,达到延长续使里程的目的.增程式公交车主要参数及性能指标如表1和表2所示.

表1 增程式公交车主要参数

表2 增程式公交车性能指标
2 动力参数匹配
2.1整车总功率匹配
根据最高车速Vmax、最大爬坡imax要求及0 ~Vm的加速时间tm,计算所需功率分别为Pmax,1,Pmax,2,Pmax,3.
首先,根据最高车速Vmax确定最大功率Pmax,1:
(1)
其次,根据爬坡性能确定最大功率Pmax,2:
(2)
式(2)中:Vi为爬坡车速.
最后,根据加速性能确定最大功率.整车在加速的末时刻,动力源输出最大功率,因此,加速过程最大功率Pmax,3:
(3)
式(3)中:δ为质量系数;Vm为末速度.
根据上述动力性三项指标计算各工况最大功率,动力源总功率Pmax必须满足上述所有的设计要求,即Pmax≥ max(Pmax,1,Pmax,2,Pmax,3).由式(1)~(3)以及整车参数,根据整车动力性要求,得到Pmax=190 kW.
2.2驱动电机的选择
驱动电机的匹配主要需考虑以下3方面的因素[10].
1)满足整车功率的需求.由于在增程式公交车中,驱动电机是唯一的驱动源,因此其峰值功率应满足整车的最大功率需求,根据上节的计算可知,其功率需求应大于或等于190 kW.
2)满足最大爬坡时峰值扭矩的需求.汽车在爬坡条件下的行驶方程式如式(4)所示:
(4)
根据式(4),可得以15 km/h爬20%的坡时公交车所需的驱动力Fmax=36.9 kN,电机所需最大扭矩Tmax为
(5)
由上可知电机的需求扭矩Tnec=1 085N·m.
3)满足最大车速时峰值转速需求.
(6)
式(6)中:ig2为二挡速比.根据式(6)可知当汽车以69 km/h车速行驶时,驱动电机最大转速需求为nmax=2 300 r/min.综合考虑电机的设计要求,选定驱动电机的峰值转速为2 500 r/min.
综上,选择驱动电机的参数要求如表3所示.

表3 驱动电机参数
2.3电储能系统参数匹配
以纯电动状态下的续驶里程S1计算蓄电池组功率P和能量W,要求以Vc=40 km/h纯电行驶50 km(按国家标准公交车日行驶里程为160 km).
(7)
由式(7)可得该车速下的功率P需求为32.5 kW.
式中:t1为纯电续驶时间.可以得出所需电池能量W为40 kWh.选择的电池参数如表4所示.

表4 电池参数
超级电容主要用在制动能量回收以及起步、爬坡等大功率需求工况下辅助提供驱动功率,以避免动力电池承担过大的电流.当制动能量回收时,超级电容所需的最大存储能量Ecap应满足:
(8)
式(8)中:Ebrk为单次制动可回收的最大能量;Ebat_1c为电池以1 C充电功率充电时的能量.
根据系统要求,复驶最大距离(指在40 km/h 车速下进行再生制动,所回收的电能全部用于再驱动汽车纯电行驶的最大距离)必须大于250 m.根据城市工况起动特点,将提供大电流的时间t2设为15 s,并且所选电动机的最大电流Imax为350 A,因此需要超级电容容量Qs为
(9)
2.4APU参数匹配
在增程式混合动力汽车中,发动机主要用于爬坡或加速时与ISG(integratedstarterandgenerator,起动发电一体机)电机组成APU发电,联合电池共同输出功率给驱动电机.在满足这些功能需求的同时,为保证系统的高效率,要满足高效区与常用工作点自然重合,使发动机与ISG电机高效发电.因此发动机与ISG的匹配要综合考虑电池的输出功率、发动机的经济区间和发电机的高效区间.ISG电机的匹配主要考虑以下3个方面的因素.
1)要求ISG具有起/停发动机的功能,并且ISG电机在0.5s内将发动机拖动到怠速转速800r/min.此时起动发动机功率Pm1为
(10)
式(10)中:ts为启动时间;ω为转速,800r/min对应转速为83.73rad/s;Je为发动机转动惯量;Td为最大摩擦转矩,取30 ℃下转速800r/min时发动机所对应的摩擦力矩.
2)考虑在40km/h巡航车速下,如电池处于低SOC状态,亟需补充电能,此时ISG仍能以推荐充电电流为动力电池充电,电池额定充电电流为0.3C,则在当前动力电池配置下,最佳充电功率为49kW.综合以上功率方面的因素,将ISG的功率定为额定45kW,峰值90kW.
3)考虑APU发电效率,ISG电机高效区与发动机的低燃油消耗率所处的工作区应该重合.
3 整车建模及仿真
3.1整车建模及信号连接
从CRUISE软件界面窗口的模型库中选择并拖动相应部件至建模窗口中[11],建立如图2所示的整车模型.

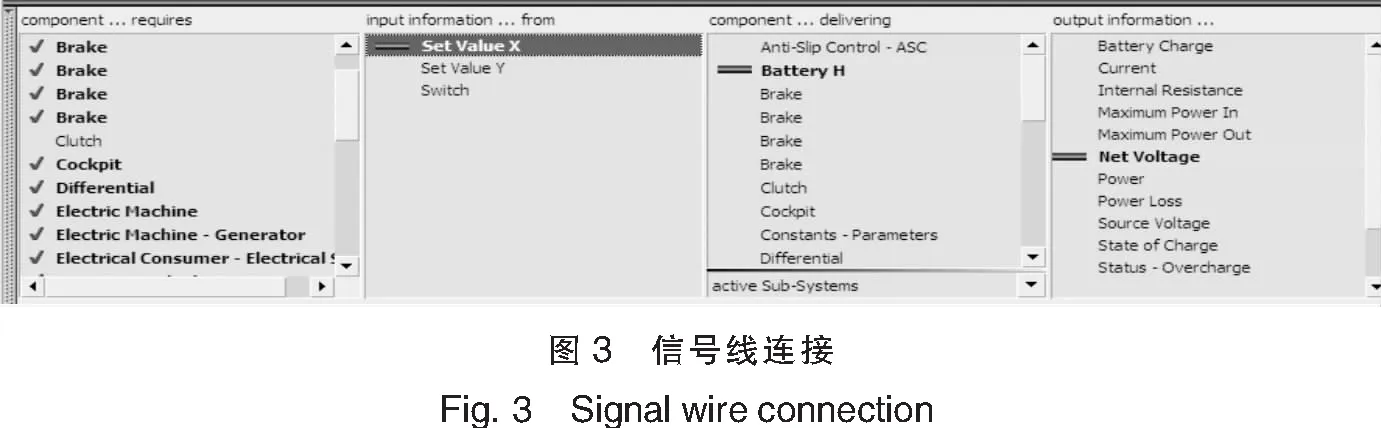
在各部件中输入上节所设计的参数,在MatlabDLL模块中建立所需的整车控制信号,并连接好信号线如图3所示.
3.2控制策略建模
采用模块化将整车控制策略分为需求功率计算、制动能量回收控制、APU模块控制、驱动电机控制、变速箱换挡控制及储能模块控制6个主要部分[12],建立控制策略的Simulink模型如图4所示.
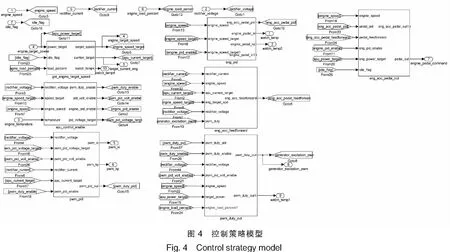
由于ISG电机功率是根据一般工况需求设计的,在爬坡时其不能够满足驱动电机大功率的需求,此时必须联合电池给驱动电机提供能量,同时综合考虑电池的使用寿命,将电池工作的SOC值设置在35%~85%之间.
3.3仿真结果及分析
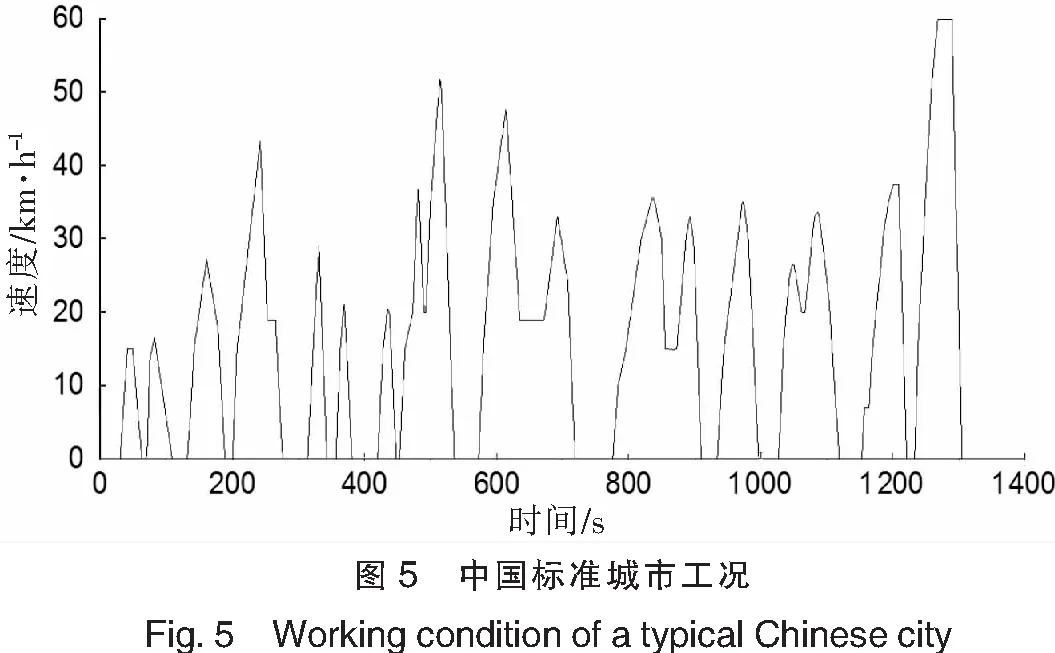
将上述Simulink模型转化为dll文件,与CRUISE整车模型联合,选择如图5所示的中国标准城市工况进行经济性仿真和加速、爬坡等动力性仿真.
经济性、动力性仿真结果如表5~6所示.

表5 经济性仿真结果

表6 动力性仿真结果
通过经济性仿真结果可以看出:相比无变速箱结构的传统增程式公交车,增加自动变速器和超级电容后的系统节油率提升了14.23%.通过动力性仿真结果可以看出:由于增加了自动变速器,系统0~50km/h加速时间缩短了3.4s,而在20km/h时的最大爬坡度增加了5.5%,在动力性能方面取得了较大的提升.综合动力性、经济性试验可以得出:加入自动变速器和超级电容后,不仅可以增大试验车爬坡、加速等能力,系统的节油率得到了提升.在同等情况下,加入两挡箱可以减小系统对驱动电机的扭矩需求.
4 结论
在传统增程式公交车的基础上,设计了增加自动变速器和超级电容后的新型增程式公交车系统,并对其主要部件进行参数匹配优化.基于AVL-CRUISE/Simulink联合仿真平台搭建了该车的仿真模型,对系统构型和控制策略进行了经济性和动力性仿真验证.结果表明,改进后的系统爬坡、加速能力得到了较大的提升,在中国标准城市工况下节油率提升了14.23%.
[1]康凯,王军雷,杨凯.国内外新能源汽车发展及政策导向[J].汽车工业研究,2014(8):4-10.
[2]袁富华,陈余富,史彦刚.石油短缺与中国经济安全[J].中国人口·资源与环境,2001,11(4):38-41.
[3]万钢.中国“十五”电动汽车重大科技专项进展综述[J].中国科技产业,2006(2):110-117.
[4]李锦,徐兆坤,许建昌.浅谈PHEV的发展现状及趋势[J].上海汽车,2009(2):10-12,28.
[5]李涛,陈猛.增程式公交车动力系统设计及实例化研究[J].中国机械工程,2011,22(14):1 759-1 763.
[6]EHSANIM,RAHMANKM,TOLIYATHA.Propulsionsystemdesignofelectricandhybridvheicle[J].Journals&Magazines,1997,44(1):19-27.
[7]孙奎洲,王凯,范鑫,等.增程式电动汽车动力总成参数匹配设计[J].计算机测量与控制,2014,22(10):3 396-3 402.
[8]范炳良,林朝平,石常青.混合动力总成的研究与开发[J].机械研究与应用,2007,20(3):9-11.
[9]郑治国.混合动力客车动力传动方案设计及综合研究[D].南京:南京理工大学,2012.
[10]余志生.汽车理论[M].3版.北京:机械工业出版社,2000.
[11]连静,化玉伟,李琳辉,等.基于CRUISE的并联混合动力汽车建模与仿真[J].汽车电器,2014(5):56-59.
[12]孙晓帮,陈长红,杨晓琦,等.增程式电动车动力匹配与控制策略研究[J].农业装备与车辆工程,2013,51(7):25-29.
(责任编辑李宁)
Optimization and Simulation on Powertrain ofa New Extended Range Electric Bus
LI Yong,YU Jian-bin,MA Teng-teng,CHEN Feng-lei,YANG Yun-dong
(SchoolofMechanical&AutomotiveEngineering,XiamenUniversityofTechnology,Xiamen361024,China)
Apowertrainsystemwithdouble-gearautomatictransmissionwasdevelopedfortheextendedrangeelectricbuswithoutgearboxtoimproveitspoormotorspeedrange,lowclimbingabilityandpoorbrakingenergyrecovery.Structureandmainparameterofthepowertrainsystemwereanalyzedandmatched,andthesystemanditscontrolstrategysimulatedandvalidatedusingthejointCRUISE/Simulinksimulationplatform.Theresultsshowthatthepowertrainiswelldesignedandmatched,capableofreducingtherequiredmotortorque,extendingtheworkingdistanceandimprovingthebrakingenergyrecoveryefficiency.
extendedrangeelectricbus;powertrain;double-gearautomatictransmission;climbingability;efficiency
2014-12-29
2015-01-22
厦门理工学院高层次人才项目(YKJ13001R)
李勇(1976-),男,讲师,博士,研究方向为汽车动力传动系统.E-mail:timliyong@163.com
U469.72
A
1673-4432(2015)01-0001-06
