单滑块变质心再入飞行器分岔特性
2015-08-17王亚飞于剑桥王林林苏晓龙
王亚飞,于剑桥,王林林,苏晓龙
(北京理工大学宇航学院,北京100081)
单滑块变质心再入飞行器分岔特性
王亚飞,于剑桥,王林林,苏晓龙
(北京理工大学宇航学院,北京100081)
基于非线性动力学模型,给出了单滑块变质心再入飞行器的平衡点及其稳定性随滑块偏移距离的变化规律,得到了系统分岔图,并在此基础上求解了典型条件下各吸引子的吸引域。结果表明滑块偏移距离对再入飞行器的平衡点数量及稳定性具有明显的影响,同时初始飞行条件对飞行器的最终收敛状态也具有重要的影响,不合适的初始条件有可能导致飞行器被锁定在不期望的平衡点或极限环中,从而引起失速或失控等问题。此外,通过分析不同系统参数下的分岔图变化规律,总结了再入飞行器结构及气动参数对系统分岔特性的影响,进而为系统参数的设计提供了参考。
变质心飞行器;非线性动力学;分岔;吸引域
0 引 言
随着导弹防御技术的进步,机动再入飞行器越来越受到各国的重视。再入飞行器机动控制方法主要有3种[1]:①靠改变弹体气动外形产生法向力,如十字舵面控制、可动鼻锥控制;②依靠侧喷矢量发动机产生脉冲法向力;③变质心控制,该方法依靠改变再入体内部活动质量块的位置,改变弹体质心位置,从而在空气动力的作用下产生配平力矩改变弹体姿态及法向力,最终实现弹道机动飞行。相比于第一种控制方法,变质心控制无需改变再入体的气动外形,可有效避免高速飞行条件下的舵面烧蚀问题;相比于侧喷矢量发动机控制方法,变质心控制无需携带大量燃料,控制效率高,且不存在侧喷扰流问题。由于具有这些优点,变质心控制成为了再入飞行领域的研究热点。
按照滑块数量的不同,变质心再入飞行器可以分为单滑块控制或多滑块控制[2]。其中,单滑块控制具有执行机构少、控制原理简单的优点,国内外学者均对此展开了广泛的研究,研究内容包括动力学模型的建立[3-5]、滚转自动驾驶仪设计[3-4]、制导律设计[5-6]、控制机理分析[7]、参数优化[8]等。近年来,随着现代控制理论的发展,现代控制在再入飞行器控制中的应用越来越广泛。文献[9-12]分别采用自抗扰控制、变结构控制及轨迹线性化方法设计了单滑块变质心飞行器的滚转控制系统,取得了较好的控制效果。文献[13]则将一种自适应智能控制策略应用到了变质心再入飞行器的控制当中。
在变质心再入飞行器动力学特性分析方面,由于具有气动非对称和结构非对称的特点,使得单滑块变质心飞行器的动力学成为一个具有强耦合性的高阶非线性系统,基于传统的线性系统理论很难对飞行器的姿态动力学特性展开研究,因此对于此类非线性动力系统的分析主要是基于奇异性及分岔理论展开。
分岔分析方法形成于20世纪70年代末,是非线性动力学系统定性研究方法的一个重要分支。近年来,非线性学科的发展以及计算机技术的进步使得分岔理论在各学科的研究领域中得到了广泛应用。在飞行器领域,文献[14-17]将分岔理论应用在了飞机大迎角非线性动力学分岔分析及控制的研究中;文献[18]分析了客机的翻转动力学分岔现象;文献[19]使用分岔方法,针对弹性机体飞机的动力学、稳定性及控制问题展开了研究;此外,分岔方法还被应用在翼伞运载系统的飞行动力学问题[20-21],有负载的直升机动力学问题的研究中[22]。在再入飞行器方面,文献[23]针对对称再入飞行器的极限环运动进行了分析;文献[24]以类似“联盟号”飞船返回舱为研究对象,分析了该类飞行器的非线性动力学分岔特性及各吸引子的吸引域;文献[25]针对自主着陆飞行器的纵向运动随俯仰舵偏角变化产生的鞍结分岔现象进行了研究,并依据分析结果设计了自动飞行控制系统。
本文将分岔理论用于具有非对称特点的变质心再入飞行器,使用数值计算方法得到了系统以滑块偏移距离作为变化量的分岔图并进行了分析。此后,在分岔图的基础上,对典型情况下各吸引子的吸引域进行了仿真,得到了不同滑块偏移距离下,飞行器在不同初始飞行条件下的收敛结果,并据此总结了各吸引子的吸引域分布规律。最后,通过计算不同系统参数下分岔图及分岔点的变化规律,给出了系统参数对非线性动力学特性的影响。
1 建 模
单滑块变质心再入飞行器的典型结构如图1所示。这种飞行器是一种外形不对称的飞行器,通过切削圆锥体实现,再入体内部有一个可相对于气动对称平面侧向移动的活动质量块。该类飞行器为滚转单通道控制,在俯仰及偏航通道上则是通过气动静稳定性来保证姿态的稳定。由于俯仰方向上气动不对称,因此其自配平状态下可产生固定的配平升力。在进行弹道机动飞行时,需通过横向移动质量块使飞行器的质心偏离气动对称面,从而在配平升力的作用下产生滚转控制力矩控制飞行器的滚转姿态,进而改变配平升力的方向达到弹道机动的目的。
由于具有气动不对称、结构不对称的特点,变质心控制的固定配平再入飞行器存在非线性气动力、惯性矩、运动学及动力学之间的耦合作用,其动力学具有强非线性、强耦合性的特点。经典欧拉角在滚转再入飞行器的分析中具有广泛的应用[26],使用经典欧拉角建立的非对称再入飞行器的模型具有物理含义明确、形式简单的特点。为了简化分析,本文利用以经典欧拉角及其角速度为状态变量的简化动力学模型,展开变质心再入飞行器分岔特性的分析。经典欧拉角包括进动角、章动角及自转角,是再入飞行器坐标系及准速度坐标系之间的一组相对角度。若再入壳体的质心为O,则再入飞行器坐标系及准速度坐标系可定义如图1所示。

图1 单滑块变质心再入飞行器典型结构图
(1)再入飞行器坐标系(Oxbybzb)
原点为O,Oxb轴沿壳体对称轴方向指向前为正,Oyb在对称平面内指向上为正,Ozb轴与其他两轴满足右手定则,从弹尾看指向右为正。
(2)准速度坐标系(Ox5y5z5)
原点为O,Ox5沿速度方向指向前为正,Oy5位于包含Ox5的竖直平面内指向上为正,Oz5由右手定则确定。
经典欧拉角的定义如图2所示。首先Ox5y5z5坐标系沿Ox5旋转ζ(定义为进动角)至Ox5y’z’坐标系;然后绕Oz’轴旋转δ(定义为章动角)至Oxby”z’坐标系;最后绕Oxb轴旋转λ(定义为自转角)至Oxbybzb坐标系。

图2 经典欧拉角的定义
为建立再入飞行器的姿态动力学模型,首先需要给出弹体坐标系下的合外力及合外力矩:

式中,攻角α、侧滑角β可由章动角δ、自转角λ表示

联立式(1)~式(3),即可得到以δ及λ表示的合外力和合外力矩。
考虑到弹体姿态运动相对于质心运动为快时变运动,因此在分析角运动时,可以认为载体速度的大小及方向保持不变。在这一假设下,准速度坐标系为惯性坐标系,再入飞行器的角速度可以用δ、ζ和λ的导数表示

对式(4)求导并化简,可得以经典欧拉角表示的变质心再入飞行器非线性动力学模型)


式中,合转动惯量矩阵为

式中,JM为载体的转动惯量;Jm为由活动质量块偏移引起的附加转动惯量

m为滑块质量,M为除滑块之外的再入体质量,μ为质量比

滑块在弹体坐标系下的位置、速度及加速度为

2 分岔特性分析
分岔现象是非线性动力学系统特有的现象,对非线性系统的定性分析具有十分重要的作用。若一个系统是结构不稳定的,则任意小的参数变化都会使得动力学系统的拓扑结构发生突然的质的变化,这种变化称为分岔。因此可将分岔的数学定义叙述如下:
对于含参数的动力学系统

式中,x∈Rn称为状态变量;μ∈Rm称为分岔参数。当参数μ在Rm内连续变化时,若系统式(10)的拓扑结构在μ=μ0处发生突然变化,则称系统式(10)在μ=μ0处出现分岔,并称μ0为分岔值或临界值,称(x,μ0)为分岔点。在参数μ的空间Rm中,由分岔值所构成的集合称为分岔集。在(x,μ)的空间Rn×Rm中,系统的极限集(如平衡点、极限环等)随参数μ变化的图形称为分岔图。分岔可按照研究对象的不同分为静态分岔和动态分岔。其中,平衡点个数和稳定性随参数变化为静态分岔,极限环则是动态分岔的主要研究对象之一。
若Dxf(x0,μ0)为f关于x的在(x0,μ0)处的雅克比矩阵,则可以证明系统式(10)在(x0,μ0)处静态分岔的必要条件为Dxf(x0,μ0)不可逆,即系统式(10)在(x0,μ0)处至少存在一个零特征值。对于高维非线性系统,求得系统平衡点的解析解是十分困难的,因此难以使用解析方法分析系统的分岔现象,数值方法为研究高维分岔问题的主要方法。该方法首先使用数值方法追踪求解出系统解曲线随分岔参数的变化,同时通过判断解的特征值变化规律判断系统的稳定性及分岔点的位置、类别。据此绘制出非线性系统的分岔图,则可依据分岔图对系统随分岔参数的定性变化展开分析。
当滑块位置固定时,再入飞行器姿态动力学系统为自治系统,本文的研究主要是针对该系统的静态分岔现象展开。分析分岔现象的基础是平衡点的求解。为求解该系统的平衡点,令,设平衡点章动角、进动角速度、自转角分别为,则满足

其中

未知量与方程数同为3个,因此使用数值计算方法求解式(11)可以得到平衡点随滑块偏移距离z的分布曲线。通过变量替换可以证明,在其他参数不变的条件下,若{zP,为方程式(11)的一个解,则也是方程式(11)的解,且在这4个解处,系统具有相同的动态特性。因此,在本文中,认为为同一个平衡点。
为得到单滑块变质心再入飞行器姿态动力学系统的分岔图,需计算出平衡点数值及稳定性随滑块偏移距离的变化规律。这一计算过程可以依据延续原理展开,也可以使用非线性数值分析工具AUTO或MATCONT得到,其具体的求解过程本文不再赘述,仅给出结果。
主要参数取如下数值进行仿真:
图3~图5给出了依据仿真结果绘制的系统在z∈(-0.5m,0.5m),δP∈(-π/2,π/2)范围内的平衡点分岔图。
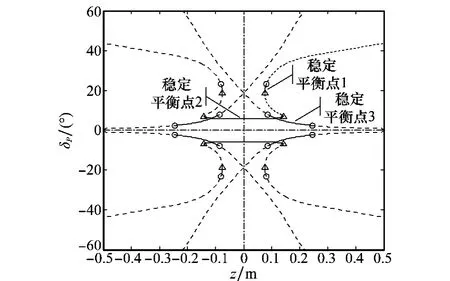
图3 δP随滑块偏移距离z的变化

图4 λP随滑块偏移距离z的变化

图5 ˙ζP随滑块偏移距离z的变化
图中,虚线表示不稳定的平衡点,实线表示稳定平衡点;三角形点“Δ”表示极限点,在该点处,系统具有一个零实根,两对共轭复根;圆形点“○”表示Hopf分岔点,在该点处,系统具有一对纯虚根,一对共轭复根及一个负实根。由图3~图5可见,不同于线性系统,该非线性系统的平衡点数量及稳定性均随滑块偏移距离的变化发生明显的改变。不考虑对称分布的多余平衡点,仅分析z∈(0m,0.5m),δP∈(0,π/2)的情况,则在该仿真条件下,系统的平衡点具有以下分布规律:
当z∈(0m,0.075 2m)时,系统具有1个稳定平衡点及2个不稳定平衡点;
当z∈(0.075 2m,0.080 9m)时,系统具有2个稳定平衡点及3个不稳定平衡点;
当z∈(0.080 9m,0.085 3m)时,系统具有1个稳定平衡点及4个不稳定平衡点;
当z∈(0.085 3m,0.142 1m)时,系统具有2个稳定平衡点及3个不稳定平衡点;
当z∈(0.142 1m,0.245 0m)时,系统具有1个稳定平衡点及2个不稳定平衡点;
当z∈(0.245 0m,0.5m)时,系统具有3个不稳定平衡点。
从稳定平衡点的分布规律来看,该系统具有3组稳定平衡点,其中稳定平衡点2为设计的期望飞行状态,飞行器在此状态下具有较高的升阻比及较好的动态特性。而曲线1及曲线3表示的平衡点则为不期望的稳定平衡态,再入体的姿态运动一旦收敛于此稳定状态,则会被“锁死”,由于该状态对应着大章动角及高转速,因此极容易因阻力过大或转速过高而导致飞行器出现失速或滚转失控的问题,这是需要避免的稳定状态。除稳定平衡点外,由于Hopf分岔点的存在,该系统还存在着稳定的极限环运动,这种稳定的周期运动状态同样也是需要避免的。
需要说明的是,在上述算例中,稳态运动的概念是建立在Lyapunov意义下的,因而只是局部稳定的。对于具有多个定态的系统,仅仅知道局部渐近稳定是不够的。若期望的稳定平衡点的渐近稳定区域很小,则在较小的扰动下也会表现出不稳定的现象。为此需要引入非线性系统定范围稳定性的概念,即确定稳定平衡点的吸引域。
3 吸引域
再入飞行器姿态动力学具有多个平衡点,因此该系统的平衡状态不保证具有全局稳定性。此时,系统平衡点的大范围全局稳定性问题成为需要关注的重点。对于渐进稳定的平衡点,其“吸引区域”的大小决定了系统抗干扰的能力。当期望平衡点的吸引区域包含系统在实际运行中可能受到的干扰范围时,才能保证系统的稳定,否则,则有可能在强扰动下出现失稳的现象[27]。确定系统的吸引域是十分困难的,尤其是对于高阶非线性系统,数学分析方法很难确定系统平衡点吸引域的估计范围。而随着计算机技术的不断进步,数值计算方法逐渐成为吸引区域估算的主要方法。
对于系统式(10),若相空间Rn中的闭集A满足:以A内或其某个邻域内的点为初始条件的相轨迹在足够长时间后可充分趋近于A,则称此集合A为吸引集。若相空间Rn中点y0使得当t→+∞时从y0出发的相轨线趋于吸引集A,则点y0的全体称为吸引集A的吸引盆,也称吸引域。不能进一步分解的吸引集称为吸引子,常见的吸引子包括稳定平衡点,极限环等。通过给定不同的初始条件,使用龙格-库塔方法求解角运动微分方程组,即可获取系统通过该初始点的相轨线,进而判断出该点是否位于某吸引子的吸引域内。
对于前文的算例,以z=0.1m时的情况为例,此时系统存在两个稳定平衡点及一个稳定的极限环。将从不同起始点出发的相轨线在δ-˙δ平面上投影,所得结果如图6所示。

图6 不同起始点的相轨线在δ-˙δ平面上的投影
由图可见,不同的起始点会使得再入飞行器的姿态收敛于不同的吸引子。通过不断改变初始条件,求解各相轨线最终的收敛结果,即可获得收敛至平衡点或极限环的初始点范围,并绘制出稳定平衡点或极限环的吸引域。本文所研究的单滑块变质心再入飞行器为5维动力学系统,因此其初始条件为5维向量,在此范围内进行穷举计算需耗费大量的计算资源,因此文中仅考虑主要的影响因素,分析系统的吸引域在δ-˙ζ平面内的投影。将除δ和˙ζ之外的其他状态量初始值设为0,改变初始章动角δ0及初始进动角速度˙ζ0的数值,即可根据收敛状态确定初始点位于哪个吸引子的吸引域内。在滑块位于不同偏移距离的情况下,得到仿真结果如图7所示。图中,①号区域表示起始点收敛至不期望的稳定平衡点1;②号区域表示起始点收敛至期望平衡点2;③号区域的起始点收敛至不期望的稳定平衡点3;④号区域的起始点则收敛至极限环运动。
由图7(a)可见,当滑块偏移距离z=0m时,系统的吸引子仅有一个期望稳定平衡点,该平衡点具有大范围稳定性,飞行器在不同的初始条件下均可以收敛至期望的稳定飞行状态。区间z∈(0m,0.075 2m)内的吸引区域与该情况类似。
当滑块偏移距离z=0.078m时,系统除期望的稳定平衡点外,还存在一个不期望的稳定平衡点和一个稳定极限环。此时在高转速条件下,系统的相轨线会收敛至不期望平衡点或极限环,且章动角越大,吸引域的转速边界越低。这意味着飞行过程中,飞行器的姿态运动会被锁定在大章动角、高转速的状态下,导致飞行器出现失速、失控等问题。因此在飞行过程中,应尽量将转速控制在较低的范围内。区间z∈(0.075 2m,0.080 9m)内的吸引区域与该情况类似。

图7 滑块位于不同位置时各吸引子的吸引域
当滑块偏移距离z=0.1m时,情况与z=0.078m的情况较为接近,系统除期望的稳定平衡点外,还存在一个不期望的稳定平衡点和一个稳定极限环。在此条件下,飞行器转速较高时,系统的相轨线会收敛至极限环或另外一个不期望的稳定平衡点。区间z∈(0.085 3m,0.142 1m)的吸引区域与该情况类似。
当滑块偏移距离z=0.2m时,此时不存在期望的稳定平衡点,按照初始飞行条件的不同,系统会收敛至稳定的极限环或不期望平衡点。这两种稳定状态均对再入飞行不利,因此在飞行时应避免滑块长时间停留在此位置区域,或在设计时即对滑块位置进行限幅,使其运行在期望平衡点的有效区间内,即限制z≤0.142 1m。
由以上分析可知,通过限制滑块最大偏移距离可以有效降低系统被锁定在不期望定态中的风险,尤其是当z∈(0m,0.075 2m)时,期望稳定平衡点具有大范围稳定性。因此,当再入飞行器被锁定在不期望的吸引子时,可以通过将滑块位置调整回零位附近来解除不良的自锁状态,待飞行器姿态恢复正常后再重新对再入飞行器进行有效控制。
4 分岔图随系统参数的变化
对于分岔图,除考虑其上的吸引子的吸引域外,分岔特性随系统参数的变化规律也是十分重要的性质。对于单滑块变质心再入飞行器,其弹体结构参数及气动力系数等对系统的相空间结构具有很大影响。分析各主要系统参数对系统分岔图的影响,可以得到系统结构参数及气动参数对其动力学特性的影响,从而为弹体结构、气动外形等的设计提供参考和依据。
仍基于前文算例进行仿真,通过固定其他参数而仅改变系统的某一个参数,绘制出该参数变化条件下的分岔图,即可得到分岔图随这一系统参数的变化规律。由于期望稳定平衡点对再入飞行器的动力学特性尤为重要,它直接决定了可以具有期望稳定状态的滑块最大偏移距离及稳定状态下章动角的大小;而不期望的稳定吸引子则仅对吸引域的分布具有明显影响。因此,为使分岔图简明清晰,下文仅给出含期望稳定平衡点的分岔曲线变化规律,而将另外一条分岔轨迹隐去。这并不意味着系统仅存在这一组定态曲线。
考虑滑块相对于载体质心的安装位置x、y,滑块质量m,零攻角下的升力系数cy0,零攻角下的俯仰力矩系数mz0,滚转阻尼力矩系数导数,马格努斯力矩系数导数变化条件下分岔图的变化曲线,结果如图8~图14所示。
x为滑块的轴向安装位置。x增大时,即滑块在弹体内的安装位置向前移动时,滑块在侧向的最大稳定偏移距离增大,稳定状态下的章动角有所减小。由于该再入体为锥体外形,越靠近再入体前部,则结构上允许的滑块最大偏移距离越小。因此,在考虑再入体结构尺寸限制的条件下将再入体位置适当前移,可以有效增加系统的稳定范围。

图8 不同滑块x向安装位置的系统分岔图

图9 不同滑块y向安装位置的系统分岔图
y减小时,即滑块安装于y轴负向时,期望稳定状态的最大稳定偏移距离增大,在阻力的作用下,弹体的稳态攻角有所下降。因此将滑块放置于载体内部偏下的位置有利于增大稳定范围。

图10 不同滑块质量的系统分岔图
滑块质量的增加可以有效提高滚转控制的效率,但由图10可见,提高滑块质量会导致最大稳定偏移距离的减小,因此在增加滑块质量以提高控制效率时,需同时减小最大偏移距离,以保证系统的稳定性。
由图11可见,零攻角下的升力系数cy0对分岔图的影响十分明显,甚至会导致分岔曲线拓扑结构的变化。在本算例中,当cy0≥-0.2时,其绝对值越大,则系统稳定区域越大;当cy0<-0.2时,系统分岔曲线的拓扑结构发生变化,从一条分岔曲线拆分为两条。此时,随着滑块偏移距离的增大,Hopf分岔点的出现会导致期望平衡点从稳定变为不稳定,且cy0的绝对值越大,最大稳定偏移距离越小。

图11 不同cy0的系统分岔图

图12 不同mz0的系统分岔图
与cy0类似,mz0的变化同样会导致分岔图拓扑结构的变化。当mz0≥0.007 5时,数值越大,最大稳定偏移距离越小,同时稳定配平攻角等比例增大;当mz0<0.007 5时,分岔曲线一分为二,此时,mz0越小,则最大稳定偏移距离越小,稳定配平攻角越小。滚转阻尼力矩系数导数增大时,稳定平衡攻角基本保持不变,最大稳定偏移距离增大。由于过大的滚转阻尼不利于滚转控制的快速响应,因此可以在保证滚转控制系统具有良好动态特性的基础上,通过设计较大的滚转阻尼来提高系统在滑块偏移距离较大时的稳定性。

图13 不同的系统分岔图

图14 不同马格努斯力矩系数导数的系统分岔图
马格努斯力矩系数导数增大时,系统的分岔点分布发生了明显的变化。随着马格努斯力矩系数导数的增大,分岔曲线趋于平直,极限点分岔点消失,Hopf分岔点逐步前移。Hopf分岔点的出现会导致期望平衡状态从稳定变为不稳定,且马格努斯力矩系数导数越大,系统的最大稳定偏移距离越小。
5 结 论
本文应用分岔理论,对单滑块变质心再入飞行器的非线性分岔特性进行了分析,结果表明:
(1)系统存在多个稳定的平衡点及极限环,再入飞行器的期望飞行姿态对应其中的一个稳定平衡点。该期望平衡点存在最大稳定偏移距离,当滑块偏移距离超出此范围时,期望稳定平衡点消失,系统无法收敛于期望的稳定飞行状态。因此,需保证飞行过程中,滑块偏移距离不得长时间停留在最大稳定偏移距离之外。
(2)在高转速及大章动角条件下,系统可能位于不期望的吸引子的吸引域范围内,从而导致飞行器姿态被锁定在大章动角、高转速状态下,诱发失速及失控等问题。因此在飞行过程中,应采取有效手段提高期望平衡点的吸引域。由于滑块偏移距离较小时,期望的稳定平衡状态吸引域范围很大,因此若飞行器被锁定在不期望的飞行状态下,可通过将滑块调整至对称平面内,将飞行器解锁至正常飞行状态。
(3)再入飞行器气动外形及滑块相对于质心的安装位置均对分岔图具有明显影响。滑块安装位置向前,向下移动,减小滑块质量,增大滚转阻尼力矩系数导数均可以增大最大稳定偏移距离,提高系统的稳定范围。
[1]Cui L M.Study and simulation of control and guidance system of spinning maneuver warhead with variable-centroid[D].Xi’an:Northwestern Polytechnical University,2000.(崔利明.旋转弹头变质心机动控制、制导系统的研究和仿真[D].西安:西北工业大学,2000.)
[2]Menon P K,Sweriduk G D,Ohlmeyer E J,et al.Integrated guidance and control of moving-mass actuated kinetic warheads[J].Journal of Guidance,Control,and Dynamics,2004,27(1):118-126.
[3]Petsopoulos T,Regan F J,Barlow J.A moving-mass roll control system for a fixed-trim reentry vehicle[C]∥Proc.of the 32nd Aerospace Sciences Meeting &Exhibit,1994:AIAA-94-0033.
[4]Petsopoulos T,Regan F J,Barlow J.Moving-mass roll control system for fixed-trim re-entry vehicle[J].Journal of Spacecraft and Rockets,1996,33(1):54-60.
[5]Gracey C,Cliff E M,Lutze F H,et al.Fixed-trim re-entry guidance analysis[J].Journal of Guidance,Control,and Dynamics,1982,5(6):558-563.
[6]Li Z X,Li G F.Research on a rolling guidance law of asymmetric reentry vehicle[J].Aerospace Control,2011,29(6):44-48,53.(李自行,李高风.一种基于不对称再入体的制导与控制方法研究[J].航天控制,2011,29(6):44-48,53.)
[7]Rogers J,Costello M.Control authority of a projectile equipped with a controllable internal translating mass[J].Journal of Guidance,Control,and Dynamics,2008,31(5):1323-1333.
[8]Gao C S,Jing W X,Li R K.Parameter optimization and performance analysis of moving mass actuated reentry vehicle[J].Acta Aeronautica et Astronautica Sinica,2008,29(6):1419-1423.(高长生,荆武兴,李瑞康.质量矩再入飞行器的参数优化和性能分析[J].航空学报,2008,29(6):1419-1423.)
[9]Li Z X,Li G F.Moving centroid reentry vehicle modeling and active disturbance rejection roll control[J].Acta Aeronautica et Astronautica Sinica,2012,33(11):2121-2129.(李自行,李高风.移动质心再入飞行器建模及自抗扰滚动控制[J].航空学报,2012,33(11):2121-2129.)
[10]Li R K,Jing W X,Gao C S,et al.Control system design for reentry warhead with mass moment compound actuate[J].Aerospace Control,2009,27(4):43-48,52.(李瑞康,荆武兴,高长生,等.再入弹头质量矩复合控制系统设计[J].航天控制,2009,27(4):43-48,52.)
[11]Gao C S,Jing W X,Wei P X.Research on application of single moving mass in the reentry warhead maneuver[J].Aerospace Science and Technology,2013,30(1):108-118.
[12]Su X L,Yu J Q,Wang Y F,et al.Moving mass actuated reentry vehicle control based on trajectory linearization[J].International Journal of Aeronautical and Space Sciences,2013,14(3):247-255.
[13]Mohammadi A,Tayefi M.Moving mass control system in conjunction with brain emotional learning-based intelligent control for rate regulation of suborbital reentry payloads[J].Proceedings of the Institution of Mechanical Engineers,Part I:Journal of Systems and Control Engineering,2012,226(19):1183-1192.
[14]Jahnke C C,Culick C.Application of bifurcation theory to the high angle of attack dynamics of the F-14[J].Journal of Aircraft,1994,31(1):26-34.
[15]Avanzini G,Matteis G.Bifurcation analysis of a highly augmented aircraft model[J].Journal of Guidance Control and Dynamics,1997,20(4):754-759.
[16]Li K,Fang Z P.Application of bifurcation analysis to control law design at high angles of attack[J].Acta Aeronautica et Astronautica Sinica,2003,24(4):289-292.(黎康,方振平.分叉分析方法在大迎角控制律设计中的应用[J].航空学报,2003,24(4):289-292.)
[17]Khatri A K,Singh J,Sinha N K.Aircraft maneuver design using bifurcation analysis and sliding mode control techniques[J].Journal of Guidance,Control,and Dynamics,2012,35(5):1435-1449.
[18]Gill S J,Lowenberg M H,Neild S A,et al.Upset dynamics of an airliner model:a nonlinear bifurcation analysis[J].Journal of Aircraft,2013,50(6):1832-1842.
[19]Baghdadi N M,Lowenberg M H,Isikveren A T.Analysis of flexible aircraft dynamics using bifurcation methods[J].Journal of Guidance,Control,and Dynamics,2011,34(3):795-809.
[20]Prakash O,Daftary A,Ananthkrishnan N.Bifurcation analysis of parafoil-payload system flight dynamics[C]∥Proc.of the AIAA Atmospheric Flight Mechanics Conference and Exhibit,2005:AIAA 2005-5806.
[21]Prakash O,Daftary A,Ananthkrishnan N.Trim and stability analysis of parafoil/payload system using bifurcation methods[C]∥Proc.of the AIAA 18th Aerodynamic Decelerator Systems Technology Conference and Seminar,2005:AIAA 2005-1666.
[22]Bedford R,Lowenberg M.Bifurcation analysis of rotorcraft dynamics with an underslung load[C]∥Proc.of the AIAA Atmospheric Flight Mechanics Conference,2004:AIAA 2004-4947.
[23]Hong J S,Hong S Q.Analytical study of limit cycle phenomenon for reentry vehicle[J].Acta Aerodynamica Sinica,2005,23(2):204-209.(洪金森,洪诗权.再入飞行器极限环运动分析[J].空气动力学学报,2005,23(2):204-209.)
[24]Yuan X X.Zhang H X,Xie Y F.Numerical simulation for dynamic stability in pitching of unfinned reentry capsule and bifurcation with mach number prediction[J].Acta Aerodynamica Sinica,2007,25(4):431-436.(袁先旭,张涵信,谢昱飞.飞船返回舱再入俯仰动稳定吸引子数值仿真[J].空气动力学学报,2007,25(4):431-436.)
[25]Balint S T,Kaslik E,Balint A M.Numerical analysis of the oscillation susceptibility along the path of longitudinal flight equilibria of a reentry vehicle[J].Nonlinear Analysis:Real World,2010,11(3):1953-1962.
[26]Platus D H.Ballistic re-entry vehicle flight dynamics[J].Journal of Guidance,Control,and Dynamics,1982,5(1):4-16.
[27]Zeng Z P.The estimation of attraction domain of equilibrium points of autonomous systems[J].Journal of Xiamen University(Natural Science),1983,22(2):144-155.(曾昭磐.定常系统平衡点吸引区域的估计[J].厦门大学学报(自然科学版),1983,22(2):144-155.)
E-mail:wangyafei@bit.edu.cn
于剑桥(1972-),通讯作者,男,教授,博士,主要研究方向为鲁棒控制、飞行动力学与控制、飞行器总体设计。
E-mail:jianqiao@bit.edu.cn
王林林(1987-),男,博士研究生,主要研究方向为飞行动力学与控制、飞行器总体设计。
E-mail:wang_linlin@bit.edu.cn
苏晓龙(1989-),男,硕士研究生,主要研究方向为飞行动力学与控制、飞行器总体设计。
E-mail:suxiaolong@bit.edu.cn
Bifurcation characteristics of reentry vehicle with one moving point mass
WANG Ya-fei,YU Jian-qiao,WANG Lin-lin,SU Xiao-long
(School of Aerospace Engineering,Beijing Institute of Technology,Beijing 100081,China)
Based on the nonlinear dynamic model,the variations of values and stability of equilibrium points for the reentry vehicle with one moving point mass are presented and the bifurcation diagram of the attitude motion is obtained.Then the domains of attraction of the attractors on typical conditions are computed.The results show that the deflection distance of the moving-mass element has a great impact on the quantities and stability of the system’s equilibrium points,and the final convergence status of the flight vehicle is also greatly affected by the initial conditions of the flight motion.Inappropriate initial conditions may cause the reentry vehicle being locked in an undesired equilibrium point or limit cycle and result in problems such as stall or loss-of-control.In addition,by analyzing the variation of bifurcation diagrams of the system with different parameters,the impacts of the structural and aerodynamic parameters of the reentry vehicle on the system’s bifurcation characteristics are summed up,which can provide a reference for the design of the system parameters.
moving mass actuated vehicle;nonlinear dynamics;bifurcation;domain of attraction
TJ 761.3
A
10.3969/j.issn.1001-506X.2015.06.18
王亚飞(1987-),男,博士研究生,主要研究方向为飞行动力学与控制、飞行器总体设计。
1001-506X(2015)06-1338-09
2014-07-21;
2014-10-21;网络优先出版日期:2014-11-20。
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20141120.2109.008.html
国家自然科学基金(61350010)资助课题
