基于TRIZ理论的上肢康复训练器设计
2015-08-09杨章振李志强
杨章振 李志强
(安阳市翔宇医疗设备有限责任公司,河南 安阳 455000)
我国老龄化社会问题已经显现,脑卒中而导致的偏瘫问题越来越多,我国是脑卒中病的高发地区之一,且还在逐年迅速增长,年轻化趋势愈发明显,很多患者由于得不到应有的医疗救治出现偏瘫、生活不能自理甚至死亡。
因此,需要对患者及早干预,提高患病后的生活质量,在发达国家通过康复训练,促进患者脑神经功能的重塑代偿,有效防止患者机体废用性发生。而目前的康复训练治疗通常在医院、社区卫生服务中心等医疗机构,由专业康复医师对患者推拿、按摩等方式一对一地进行康复治疗,康复效果因康复医师的专业水平、情绪波动、疲劳等因素而存在差异,并且很多患者家庭难以承受长期治疗的费用,在一些大型医疗机构通常配备有上肢康复训练器,由于我国康复事业起步较晚,导致目前的上肢康复训练器多数采用进口设备,患者每次康复费用较高,而提高我国康复医疗器械的整体水平,从康复医疗器械的自动化水平、舒适度、经济成本等方面赶超发达国家,康复医疗器械领域还需要很大程度上的不断创新[1]。
1 TRIZ理论
TRIZ(Theory of Inventive Problem Solving)是俄文中发明问题解决理论的词头。它充分揭示出创造发明的内在规律和原理,快速确认解决在系统中存在的矛盾。该理论是由前苏联根里奇·阿奇舒勒及其领导的一批研究人员,自1946年开始,在分析研究世界各国250万件专利的基础上,研究与归纳人类在进行发明创造、解决技术难题过程中所遵循的科学原理与法则后建立的。运用TRIZ 理论,可以大大加快设计人员创新的过程,提高创新的质量。
2 TRIZ理论的上肢康复训练器设计
上肢是人体最复杂的器官之一,为实现手掌运动的灵活性,人类进化出多自由度的上肢,上肢连接关节分为:肩关节、肘关节、腕关节、手指关节[2],每个关节都包含多个自由度,如表1所示:

表1 上肢各关节自由度
从患者舒适度、康复医学理论、上肢康复训练器复杂程度等方面综合考虑,以能够充分锻炼患者手部至肩关节各部分神经、肌肉为出发点,设计出实现肩关节外展/内敛、肩关节屈/伸、前臂自然下垂时肘关节屈/伸、上臂前摆时肘关节屈/伸、前臂内旋/外旋的五自由度的上肢康复训练器,其机构原理如图1所示,每个自由度运动的角度范围如表2所示[3]。
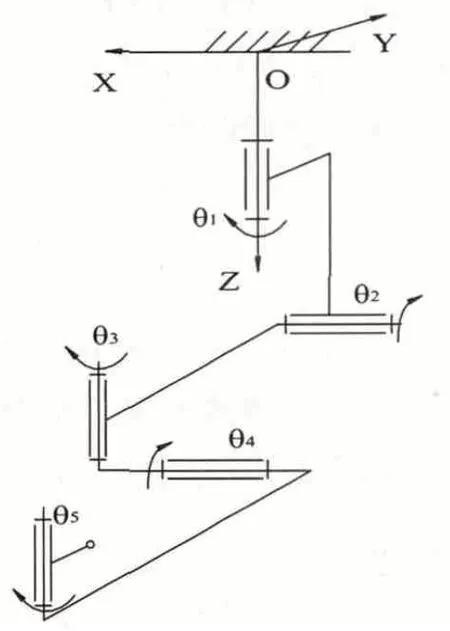
图1 上肢机构原理简图
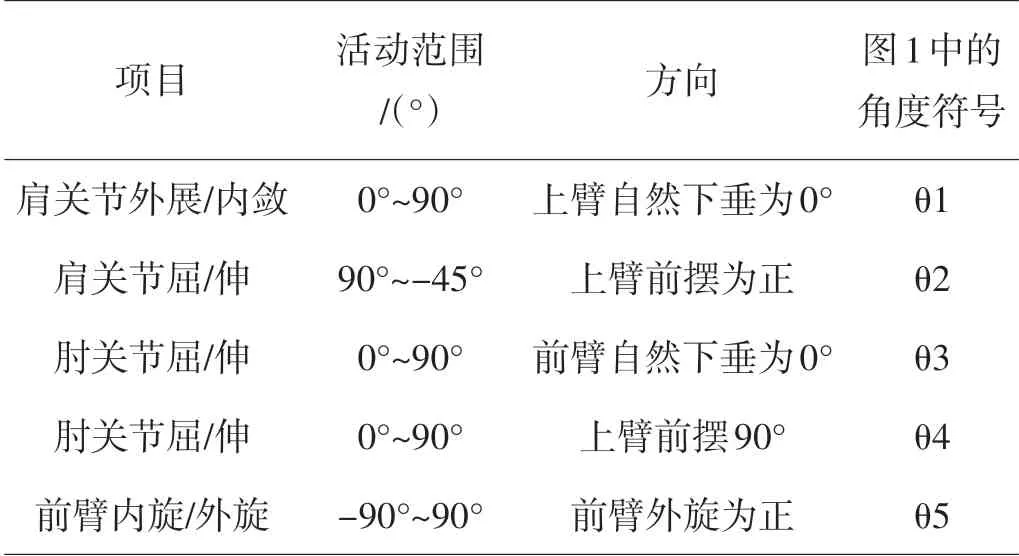
表2 上肢各关节运动范围
该五自由度上肢康复训练器每个关节处可安装驱动电机,采用动力输入方式,用于不能自主运动患者的被动运动,或者不采用外界动力驱动,无动力输入方式用于能自主运动的患者进行自主康复训练,上肢康复训练器的机械结构是有重量的,肩关节屈/伸的过程中,康复训练器的机械结构重心动态变化,驱动电机或者患者需要克服上肢康复训练器机械结构重量而引起的变化,这样导致控制并检测机械结构转动角度,计算克服机械结构重量而使电机扭矩动态输出,控制系统较为复杂。如果采用无动力输入方式,患者肩关节屈/伸的过程中阻力波动较大,大臂前摆至水平位置时阻力最大,而下摆时,阻力为负值,此时会导致康复训练器的重量使患者上肢加速下摆,容易对患者上肢造成伤害、可靠性差。
综合以上分析,采用有动力、无动力输入方式的上肢康复训练器,如果加装康复训练器的重量补偿装置,通常采用计算机检测上臂的摆动位置,计算出需要补偿重量而增加或减小驱动电机的输出扭矩,系统的复杂程度高,驱动电机浪费大量功耗,故障率高,可靠性差,电机故障时可能导致患者受伤,设备损毁,而如果不采用重量补偿装置,系统结构较为简单,损毁上肢康复训练器或使患者受伤害,所以康复训练器增加重量补偿装置是非常必要的。将安装重量补偿装置的康复训练器技术矛盾问题转换为TRIZ语言,使用TRIZ理论中的阿奇舒勒矛盾矩阵,定义技术矛盾,从中得到有效解。
在上述方案中,采用39个通用技术参数就可表示成:需要改善的参数是控制和测量的复杂性、运动物体的能量消耗与产生的恶化参数是物体产生的有害因素、可靠性四者之间的矛盾;产生的矛盾矩阵如表3所示。

表3 五自由度上肢康复训练器的矛盾矩阵
根据表3 的矛盾矩阵,产生推荐的发明原理是:2 抽取原理、8 重量补偿原理、11 事先防范原理、19 周期性作用原理、21 减少有害作用时间的原理、27 廉价替代品原理、28机械系统替代、35物理或化学参数改变原理、38强氧化剂原理。
TRIZ 矛盾矩阵中给出了9 项推荐原理,为问题的有效解提供了方向,采用27廉价替代品原理对该设计方案中的问题进行求解,如何通过简单、廉价的方式对机械结构重量进行补偿,上肢康复训练器前臂上摆至水平位置时,采用一个弹簧拉住机械机构,患者前臂下摆时,弹簧被拉伸,使康复训练器不会加速下摆,而当患者前臂上摆时,弹簧被放松,同时机械机构重心也在后移,上臂阻力基本不变化,利用三维软件渲染的五自由度上肢康复训练器三维模型图如图2所示。

图2 五自由度上肢康复训练器模型图
为提高五自由度上肢康复训练器的安全性,需要对主要承重零部件进行强度校核,上肢康复训练器后端固定位置要承受整个机械臂的重量,患者手臂质量平均3.5kg[4],机械臂重量3kg,手臂长0.75m,为安全起见,以手臂中点为质量中心,患者大臂最大上下摆动每分钟10次,每次转动范围2/3π,加速时间0.2s。
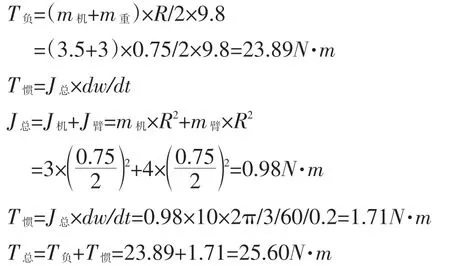
式中:T负—机械臂与患者手臂静力矩;T惯—机械臂与患者手臂惯性矩;T总—机械臂与患者手臂总力矩;J总—机械臂与患者手臂的转动惯量;J机—机械臂的转动惯量;J臂——患者手臂转动惯量。
总的惯性扭矩由大臂悬梁承受,大臂悬梁两侧中心孔距0.1m,所以每侧中心孔承受256N的载荷。对大臂悬梁进行有限元分析,设定大臂悬梁材料为合金钢,对大臂悬梁一侧孔添加固定约束,另一侧孔添加径向载荷256N,网格化分析,节总数14 632,单元总数8 975,图3为网格化的有限元分析模型。
分析出大臂悬梁受极限载荷时,最大应力为14.3MPa,屈服强度为620.4MPa,所以该大臂悬梁不会因强度不足而发生断裂变形损坏。

图3 大臂悬梁网格化的有限元分析模型

图4 大臂悬梁的应力分析图
3 结语
本文阐述了我国脑卒中患者呈逐年增加的趋势,康复训练是患者提高生活质量的一种重要途径,上肢是人体最复杂的器官之一,具有多个自由度,从患者康复效果、舒适度等反面综合考虑,设计五自由度上肢康复训练器,分析大臂屈/伸过程中设置重量补偿装置存在的技术问题,转化为TRIZ 语言,利用矛盾矩阵得出了多个有效解,根据推荐的廉价替代品原理,采用弹簧装置实现了大臂屈/伸过程中的重量补偿,结构简单实用,并使用有限元分析软件对承重零件进行了校核。
[1]张辉.六自由度外骨骼式康复训练机器人设计[D].上海:东华大学,2014.
[2]赵峰.上肢康复辅助训练机器人的设计[D].西安:西安电子科技大学,2014.
[3]曹电锋,杨启志,庄佳奇,等.一种六自由度上肢康复机器人的结构设计及运动学分析[J].工程设计学报,2013,20(4):338-343.
[4]车仁炜,吕广明,孙立宁.五自由度康复机械手臂的设计[J].机械设计,2005(4):18-21.
