基于鲁棒动态逆的高超声速滑翔飞行器动态面姿态控制
2015-08-07刘晓东黄万伟禹春梅
刘晓东 黄万伟 禹春梅,3 孙 勇
1.北京航天自动控制研究所, 北京 100854 2.宇航智能控制技术国防科技重点实验室, 北京 100854 3.国防科技大学, 长沙 410072
基于鲁棒动态逆的高超声速滑翔飞行器动态面姿态控制
刘晓东1,2黄万伟1,2禹春梅1,2,3孙 勇1
1.北京航天自动控制研究所, 北京 100854 2.宇航智能控制技术国防科技重点实验室, 北京 100854 3.国防科技大学, 长沙 410072

针对高超声速滑翔飞行器参数变化快、不确定性高、通道耦合强的特点,研究了一种姿态控制的非线性设计方法。根据无动力飞行姿态运动模型,建立了可面向姿态控制的非线性设计模型。提出了一种具有鲁棒性能的动态逆控制方案,并通过动态面控制方法,将其应用于滑翔飞行器的姿态控制中。仿真结果表明,相比基于传统动态逆的控制方案,所提出的方案可以保证滑翔飞行器快速、精确地跟踪指令,并且具备针对系统不确定性的强鲁棒性能。
高超飞行器;滑翔飞行器;姿态控制;动态逆控制; 动态面控制
高超声速滑翔飞行器采用高升阻比气动布局,具有快速反应、突防能力强和大机动作战的性能优势,已成为实现远程快速精确打击和力量投送的新型飞行器[1]。与一般的飞行器相比,高超声速滑翔飞行器的参数变化快、不确定性高、通道耦合强,传统的线性控制方法很难满足其姿态控制系统的需求,甚至会导致飞行任务的失败[2]。因此,探索具有强鲁棒性能的非线性姿态控制方法是非常有必要的。
在面对多输入多输出非线性系统的控制问题时,利用非线性动态逆方法[3]可以大大简化设计过程。但是,该方法具有很大的局限性:系统的控制矩阵必须是可逆的;模型动态过程要求被完全模型化,并且可被精确抵消。对于前者,如果可以通过模型分块的方式保证每个子系统的控制矩阵都是可逆的,也是可行的,则采用反演法进行控制律的设计,这种方法也被广泛应用于飞行器非线性姿态控制系统的设计过程[4-6]。对于后者,在实际应用中是不现实的,故需要某种形式的鲁棒控制器来抑制由于模型不确定性带来的性能偏差。此外,传统的反演方法中连续微分会带来“计算爆炸”问题,为了解决此问题,Swaroop等人提出了一种动态面控制方法[7]。该方法通过引入若干组低通滤波器避免了对虚拟指令的直接微分,具有较高的工程实用价值,因此逐渐被应用于飞行器的制导控制设计中[8-9]。基于如上的问题分析,本文提出一种鲁棒动态逆设计方法,以克服传统动态逆在鲁棒性能方面的不足,并借助于动态面控制方法,完成高超声速滑翔飞行器全通道姿态控制系统的设计。
1 问题描述
基于如下假设条件:忽略地球自转影响;将地球视为均质圆球;惯性积Jx1y1为小量,并忽略其影响。于是,对于面对称的高超声速滑翔飞行器对象,其无动力飞行的姿态运动模型可以表述为[10]:
式中,α,β,γc分别为飞行器的攻角、侧滑角和速度倾斜角,m,V,θ分别为飞行器的质量、速度和弹道倾角,ωx1,ωy1,ωz1为机体轴角速率,Jx1,Jy1,Jz1为飞行器的主转动惯量。Y,Z分别是气动升力和侧向力,Mx1,My1和Mz1分别为滚转力矩、偏航力矩和俯仰力矩,气动力/力矩的表达式如下:
式中,q,S,L分别表示动压、参考面积和参考长度。而且,实际的气动系数是关于飞行器飞行状态的非线性函数,为了便于实现飞行器的姿态控制,可以将其拟合为如下形式:
式中,拟合函数可为线性或非线性函数。
根据式(1)~(3),可得高超声速滑翔飞行器面向姿态控制的设计模型:
于是,数学模型(4)为下一步姿态控制器的设计提供依据。
2 飞行器姿态控制器设计
2.1 鲁棒动态逆控制
对于多输入非线性系统:
其中,G(x)是非奇异的。设计非线性动态逆控制律如下:

W是正定矩阵,可保证系统的实际状态向量x收敛于xd,其中xd表示期望的状态向量。
但是,当考虑非线性系统的不确定性时,即考虑如下非线性系统:
其中,ζ表示系统不确定性动态,包括参数摄动和外界干扰等。若仍然采用动态逆控制律式(6),非线性系统的状态跟踪性能将会受到不确定性的影响,即传统的动态逆控制具有鲁棒性不强的缺点,因此还需要将其做进一步改进。
定理1 假设系统的不确定性向量ζ是范数有界的,且‖ζ‖2≤Δ,则可将传统动态逆改进为:

其中,W是正定矩阵。当满足κ>Δ时,则可实现非线性系统的鲁棒状态跟踪。
证明:选取Lyapunov函数如下:
等式两边分别对时间进行微分,可得:
因为W为正定矩阵,故上式第一项-sTWs≤0,当且仅当s=0时,等号成立。对于上式的第二项,当s=0时,该式恒等于0,此时控制系统对参数摄动和外界干扰等不确定性不敏感,然而当s≠0时,有:

可得到当κ>Δ时,有:

2.2 基于鲁棒动态逆的动态面姿态控制
对于形如式(4)的非线性系统,通常采取反演与多鲁棒面控制相结合的方法。但是,传统的反演方法中连续微分会带来“计算爆炸”现象。为了避免此现象的发生,可以采用动态面控制方法[7],该方法通过引入若干个低通滤波器避免了对虚拟指令的直接微分,故具有较高的工程实用价值。
下面给出基于鲁棒动态逆的动态面姿态控制律:
式中,η=diag{η1>0,η2>0,η3>0}为滤波器系数矩阵。可见,当x2c→x2d时,控制律(14)便退化为传统的反演模式。因为控制律中含有非线性项df(si)(i=1,2),故容易引发控制量的高频抖动现象。为了削弱控制量的抖动程度,并保证方法简单易于实现,可将其用如下的连续函数替代:
于是,在本文控制方案下,高超声速滑翔飞行器的姿控系统如图1所示。
3 仿真结果
本部分将对比本文控制方案与基于传统动态逆的动态面控制方案的仿真结果,并分析本文方案的优势。仿真中,采用文献[9]提供的飞行器模型以及气动模型。同时注意,拟合方程组(3)仅用于飞行器姿态控制器的设计,并选取为如下的线性形式:
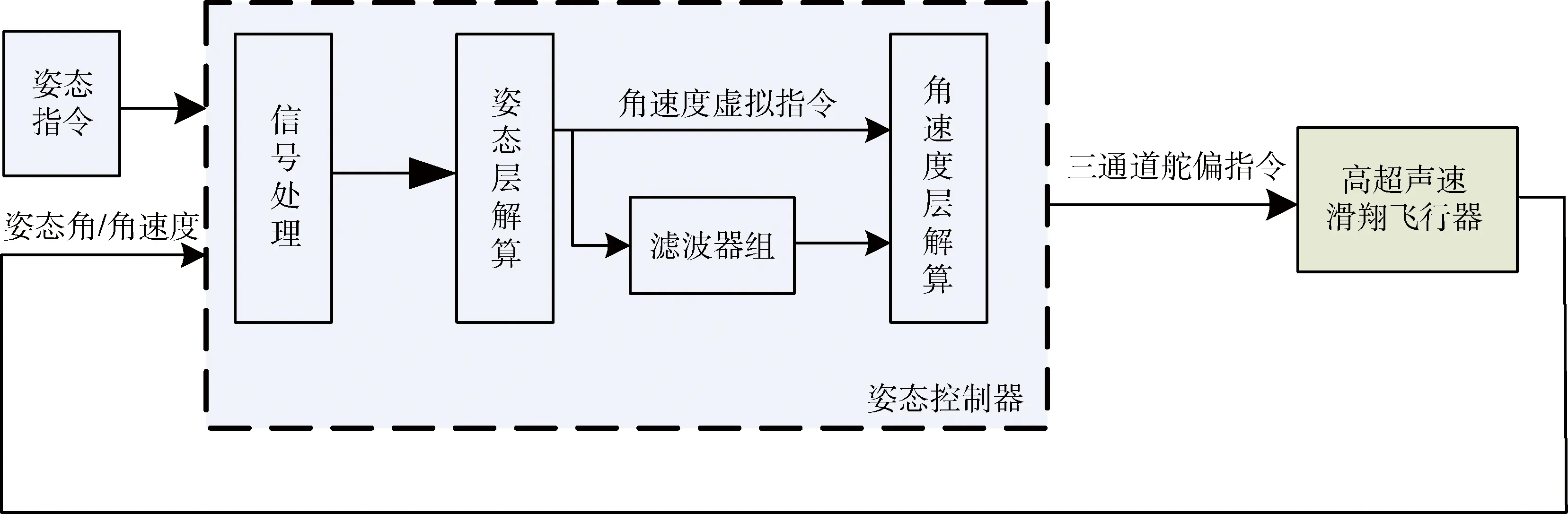
图1 本文控制方案下高超声速滑翔飞行器的姿控系统框图
式中,气动系数均取为标称测量值。此外,飞行器的飞行速度为V=2 200 m/s,飞行高度为10 km。
本文控制方案的参数值如下:
W1=diag{10,10,10},W2=diag{20,20,20},
τ=diag{0.001,0.001,0.001},
κ1=20,κ2=30,σ1=σ2=0.01
在对比控制方案中,σ1和σ2均取值为0。
假设攻角、侧滑角和速度倾侧角初始时刻均在0位置,且其指令分别为5°,10°和15°阶跃信号。考虑到实际情况,将各舵偏角限制在±30°之间。
仿真中,分别考虑不确定性系数NT为上、下界的2种情况,此时2种控制方案下姿态角跟踪曲线如图2和3所示。
通过图2和3可以看出,相比基于传统动态逆的动态面控制方案,本文控制方案下飞行器的姿态响应速度快、稳态精度高,而且具备针对参数扰动的较强鲁棒性,较好地实现了飞行器姿态控制的目的。同时,下面给出本文控制方案下的舵偏指令曲线。还可以看出,由于连续函数的引入,解算的控制量中无明显的高频抖动现象,因此增强了本文控制方案的工程可应用性。
4 结论
针对高超声速滑翔飞行器非线性对象,提出的基于鲁棒动态逆的动态面姿态控制方案,可保证飞行器姿控系统在三通道耦合和模型不确定性的影响下仍具有较好的跟踪性能。仿真结果表明,相比基于传统动态逆的动态面控制方案,本文控制方案下飞行器的动态性能更好,稳态精度更高,姿态控制系统的鲁棒性也更强。而且,本文控制方案结构较为简单,易于工程实现。因为系统的不确定性是未知且时变的,需要采用某些自适应策略实时地估计系统当前的不确定性水平,进而将其作为鲁棒项增益值的选取依据,关于此部分的研究将在今后的工作中展开。
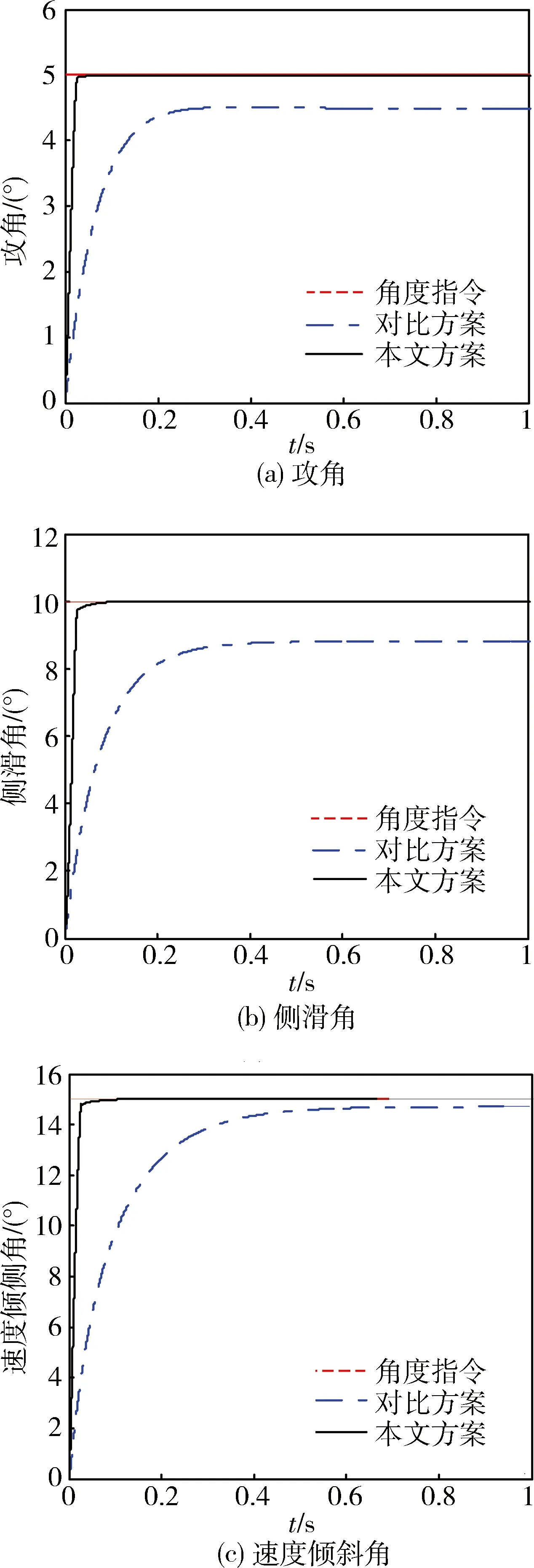
图2 2种控制方案下姿态角跟踪曲线(NT=1)
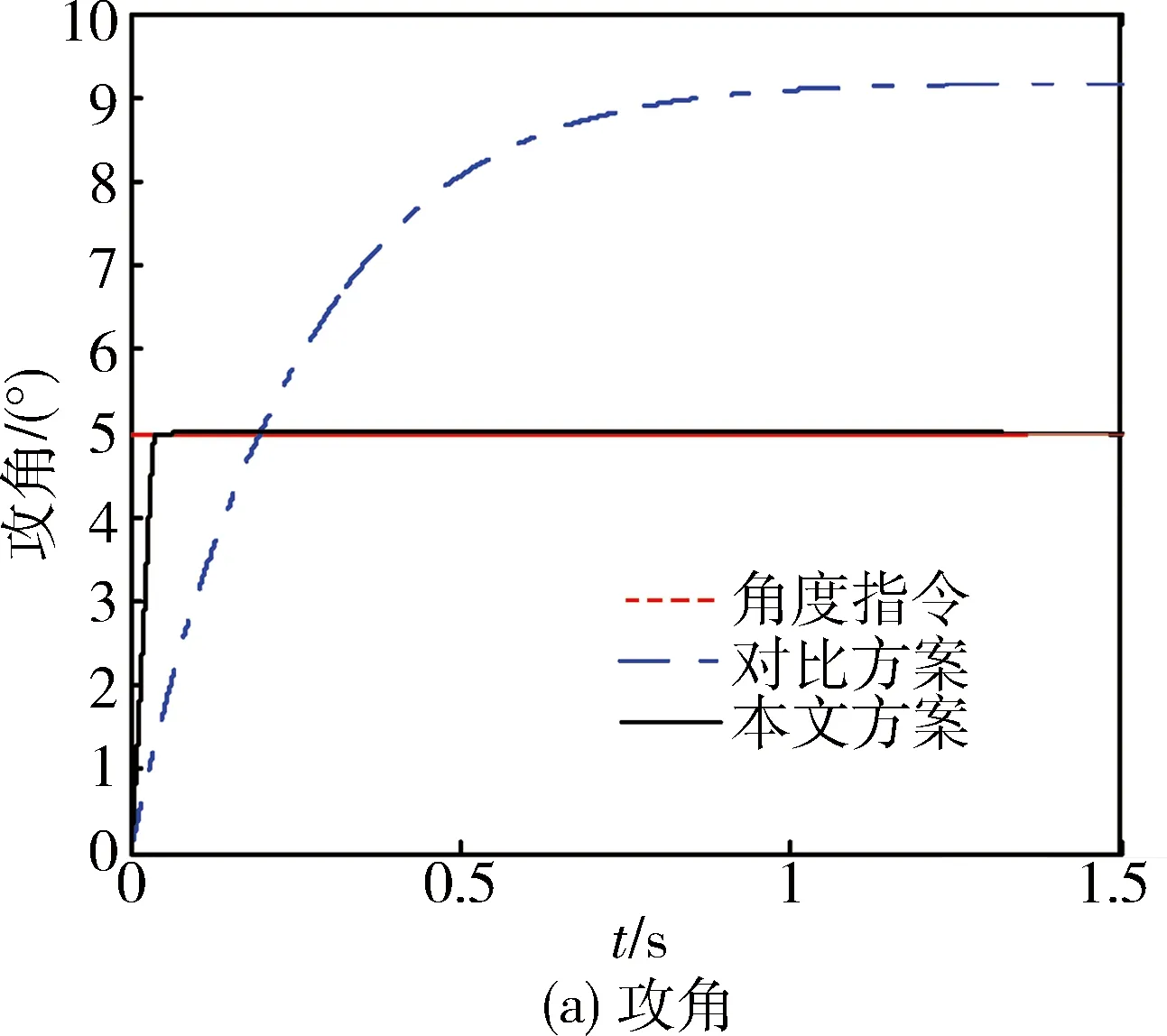

图3 2种控制方案下姿态角跟踪曲线(NT=-1)
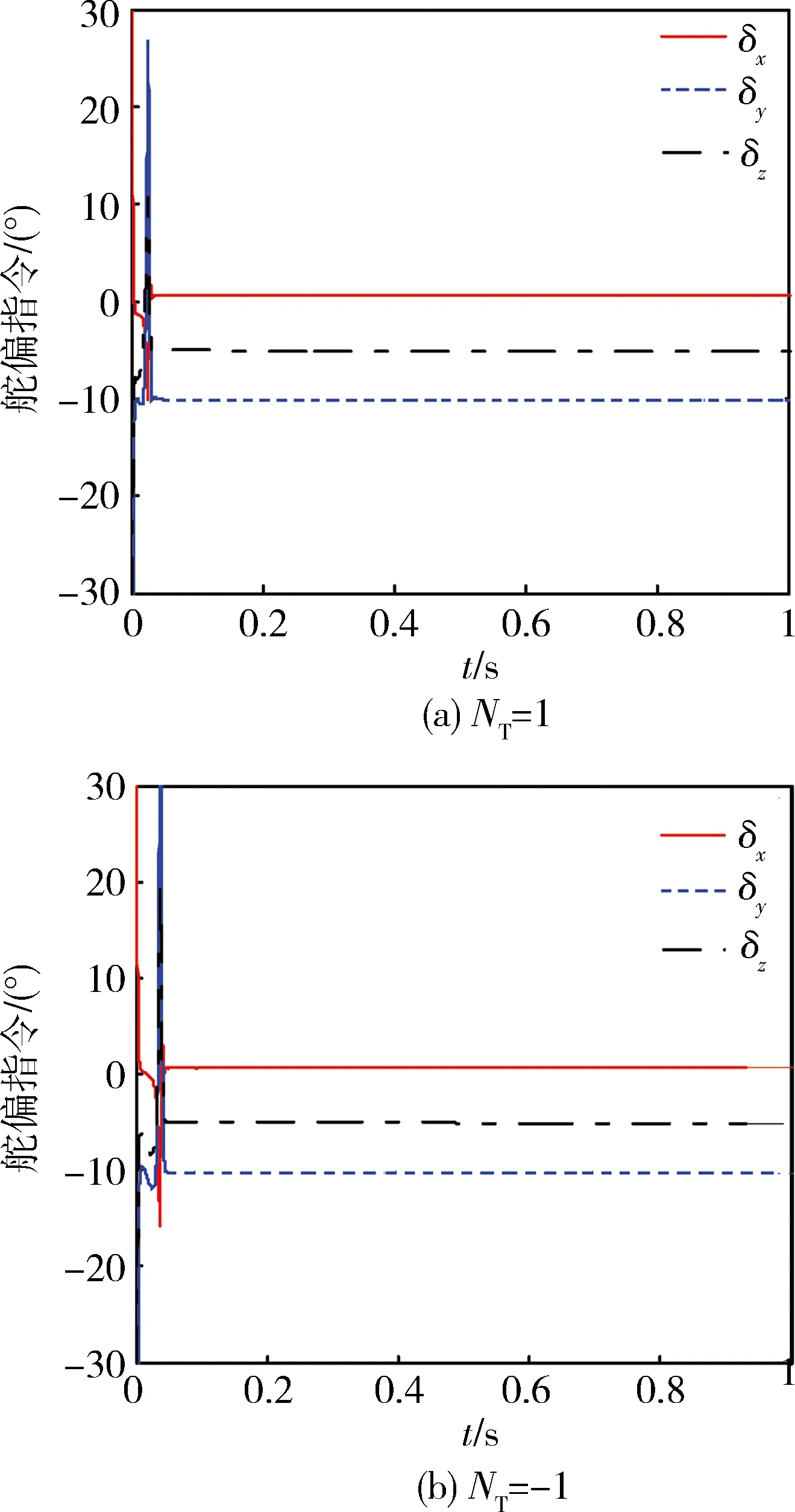
图4 本文控制方案下舵偏指令曲线
[1] 李瑜,崔乃刚,郭继锋.助推-滑翔导弹发展概况及关键技术分析[J].战术导弹技术, 2008,5 (5): 13-19. Li Yu, Cui Naigang, Guo Jifeng. Development and Key Technology Analysis of Boost-Gliding Missile[J]. Tactical Missile Technology, 2008, 5(5): 13-19.
[2] 李惠峰.高超声速飞行器制导与控制技术(下)[M].北京: 中国宇航出版社, 2012. Li Huifeng. Hypersonic Vehicle Guidance and Control Technology(2nd Volume)[M]. Beijing: China Astronautic Publishing House, 2012.
[3] Slotine J and Li W. Applied Nonlinear Control [M]. 3rd ed., NJ: Prentice-Hall, 1991: 207-271.
[4] Sonneveldt L, Chu Q P, and Mulder J A. Nonlinear Flight Control Design Using Constrained Adaptive Backstepping [J].Journal of Guidance, Control, and Dynamics, 2007, 30(2): 322-336.
[5] 秦昌茂, 齐乃明, 朱凯.高超声速飞行器自抗扰姿态控制器设计[J].系统工程与电子技术, 2011, 33(7): 1607-1610.(Qin Changmao, Qi Naiming, Zhu Kai. Active Disturbance Rejection Attitude Control Design for Hypersonic Vehicle[J]. Systems Engineering and Electronics, 2011, 33(7): 1607-1610.)
[6] 齐乃明, 秦昌茂, 宋志国.高超声速飞行器改进自抗扰串级解耦控制器设计[J].哈尔滨工业大学学报, 2011, 43(11): 33-38.(Qi Naiming, Qin Changmao, Song Zhiguo. Improved ADRC Cascade Decoupling Controller Design of Hypersonic Vehicle[J]. Journal of Harbin Institute of Technology, 2011, 43(11): 33-38.)
[7] Swaroop D, Hedrick J K, Yip P P, et al. Dynamic Surface Control for a Class of Nonlinear Systems[J]. IEEE Transactions on Automatic Control, 2000, 45(10): 1893-1899.
[8] Hou M Z and Duan G R. Adaptive Dynamic Surface Control for Integrated Missile Guidance and Autopilot[J]. International Journal of Automation and Computing, 2011, 8(1): 122-127.
[9] Hou M Z, Liang X L, and Duan G R. Adaptive Block Dynamic Surface Control for Integrated Missile Guidance and Autopilot[J]. Chinese Journal of Aeronautics, 2013, 26(3): 741-750.
[10] 钱杏芳, 林瑞雄, 赵亚男.导弹飞行力学[M].北京: 北京理工大学出版社, 2000.(Qian Xingfang, Lin Ruixiong, and Zhao Yanan. Missile Flight Mechanics[M].Beijing: Beijing Institute of Technology Press, 2000.)
[11] Mitrinovic D S, Pecaric J E, and Fink A M. Classical and New Inequalities in Analysis[M]. Kluwer Academic, 1993: 83-134.
Dynamic Surface Attitude Control for Hypersonic Gliding Vehicle Based on Robust Dynamic Inversion
LIU Xiaodong1,2HUANG Wanwei1,2YU Chunmei1,2,3SUN Yong1
1. Beijing Aerospace Automatic Control Institute, Beijing 100854, China; 2. National Key Laboratory of Science and Technology on Aerospace Intelligence Control, Beijing 100854, China 3. National University of Defense Technology, Changsha 410072, China
Regardingthefastparametervariations,highuncertaintiesandstrongcouplingsofhypersonicglidingvehicle(HGV),anonlinearattitudecontrolmethodisproposedforHGV.AccordingtotheattitudemotionmodelofunpoweredHGV,anonlinearmodelorientedtoattitudecontrollerdesignisestablished.Adynamicinversioncontrol(DIC)withrobustpropertyisproposedandthenappliedtotheHGVattitudecontrolbyusingdynamicsurfacecontrol(DSC)approach.ThesimulationresultsshowthatthechosenvehicleusingtheproposedcontrolschemecantrackthecommandsmorerapidlyandaccuratelybycomparingtoothercontrolschemebasedontraditionalDIC.Furthermore,italsopossessesstrongerrobustnessagainstsystemuncertainties.
Hypersonicvehicle;Glidingvehicle;Attitudecontrol;Dynamicinversioncontrol;Dynamicsurfacecontrol
2014-02-25
刘晓东(1987-),男,山东人,博士,主要研究方向为飞行器制导与控制技术、伺服系统控制技术等;黄万伟(1970-),男,湖南人,博士,研究员,主要研究方向为飞行器先进控制理论与应用、导航与制导技术等;禹春梅(1975-),女,黑龙江人,硕士,研究员,主要研究方向为制导系统设计、仿真测试系统设计等;孙 勇(1984-),男,山东人,博士,工程师,主要研究方向为飞行控制、优化计算等。
TJ765.2
A
1006-3242(2015)01-0022-06
