信号交叉口绿色驾驶车速控制方法
2015-08-07安实姚焓东姜慧夫崔建勋
安实,姚焓东,姜慧夫,崔建勋
(哈尔滨工业大学,哈尔滨150001)
信号交叉口绿色驾驶车速控制方法
安实*,姚焓东,姜慧夫,崔建勋
(哈尔滨工业大学,哈尔滨150001)
信号交叉口是整个城市交通路网中的瓶颈区域.车流经常在路口停车等候造成怠速行驶,严重降低交叉口的通行效率,同时造成严重的汽车尾气排放污染.为了减轻交叉口对交通流的阻断,合理降低信号交叉口的车辆延误、燃油消耗和污染物排放,本文提出了一种基于多级可变速度限制的信号交叉口绿色驾驶控制方法.该方法以可变速度限制值为控制变量,并基于固定式检测器获取的交叉口附近道路交通状况信息对车辆进行速度限制值的实时发布,以实现在不增加旅行时间的基础上平滑车辆驶近交叉口过程中的时空轨迹.通过MATLAB对该方法进行仿真验证,结果表明,其能够有效地降低交叉口的车辆延误,并减少车辆的燃油消耗与污染物排放量.
交通工程;绿色驾驶;可变速度限制;信号交叉口;交通仿真
1 引言
城市路网中存在大量的信号交叉口,车辆由于受其控制信号的周期性干扰,会产生车速波动,导致交叉口通行效率下降及燃油消耗与污染物排放上升,并严重影响车辆运行过程中的安全性与舒适性[1].而随着智能交通系统(ITS)的发展,出现了基于车辆速度控制的绿色驾驶控制方法,根据统一的交通控制设备发布速度限制值来帮助驾驶员选择最佳行驶速度,以降低车辆运行过程中的燃油消耗和污染物排放.但目前这种速度控制的方法主要面向高速公路路段上的无信号控制交通流[2-4],本文将绿色驾驶引入城市路网中的信号交叉口区域,提出了一种基于多级可变速度限制的信号交叉口绿色驾驶控制方法,通过在交叉口进口路段布设多级可变信息板对车队中的头车发布合理的速度限制值,以避免突然加减速和怠速等驾驶行为,从而提高信号交叉口处的通行效率和车辆的节能减排效果.同时结合Newell跟驰模型[5]和VT-micro微观排放模型[6],利用MATLAB对绿色驾驶控制下的信号交叉口的交通流特性进行模拟,并对信号交叉口的通行能力与节能减排效果进行分析.
2 基于多级可变速度限制的信号交叉口绿色驾驶控制系统
2.1 系统架构
基于多级可变速度限制的信号交叉口绿色驾驶控制系统主要由路边信息采集装置、中央控制器和路边信息发布装置组成.路边信息采集装置采集道路上行驶车辆的相关信息,如速度、加速度、进入控制区域的时间等;中央控制器将采集到的信息利用控制算法进行处理,得出相应的速度限制值;路边信息发布装置的作用是将中央处理器计算得到的速度限制值发布给路上行驶的车辆.
2.2 控制范围
本系统将在控制范围内设置3个检测器和2个VMS.如图1所示,D1(空间坐标的原点)、D2和D3表示线圈检测器,用以检测车辆的速度.D3处于交叉口上游的停车线处,D1到D3的距离即为控制区域范围L.VMS1与VMS2分别布设在控制区域内,VMS1和VMS2的作用是对车辆进行速度控制,但相较于VMS1对于车速的控制效果,VMS2主要是对VMS1的控制后车辆进行微调,具体控制过程见3.2节.D1到VMS1的距离表示为L1,VMS1与VMS2之间的间隔为L2,VMS2距D3的距离为L3,D2与VMS2之间的距离为l.

图1 控制范围图Fig.1 Control scope diagram
对于最短控制范围的确定[7],应该使得车辆能够在任何速度下有足够时间进行速度调整;最长控制范围的确定是为了确保车辆能够在一个周期内通过交叉口,因此车辆以任何速度通行时都应该在一个周期时长C内.即控制范围为:

式中L是控制范围;vmax和vmin分别是规定的最大速度和最小速度;a和d分别是加速度和减速度的绝对值.
划定了控制区域的范围之后,需要进一步确定可变速度限制的布设位置,其数学表示形式为

式中Li为VMS的布设距离;T反应为驾驶员的反应时间,一般采用1~2 s;T加减速为车辆加减速所用的时间,一般采用3~5 s;T稳定为车辆稳定运行的时间,一般为5~10 s;V绿波表示路段的设计绿波速度.通常情况下,VMS布设的间隔为200~300 m[8].
3 基于多级可变速度限制的信号交叉口绿色驾驶车速控制方法
3.1 头车的速度控制方法
如图2(a)所示,表示了未使用VSL进行控制时,头车通过交叉口的时空轨迹图.图中ci(i=1,2,…)为第i个信号周期结束时刻,tg+iC(i=1,2,…)为第i个绿灯时间结束时刻.车辆匀速行驶向交叉口,此时为红灯时间,减速停车等待下一个绿灯时间开始时通过交叉口,由此将产生大量的污染物排放和燃油消耗.为此首先对头车进行速度控制,使其提前进行减速并在绿灯时间开始时到达交叉口停车线处,从而规避驶进交叉口过程中的速度波动.
如图2(b)所示,表示了使用VSL进行控制时,头车通过交叉口的时空轨迹图.头车到达控制区时,交叉口正处于绿灯时间,此时D1检测器记录下车辆的初始速度v0和车辆的进入时刻tin.根据VSL控制策略,车辆到达VMS1时按照相应的速度限制进行加速度为d的匀减速到vL,然后再匀速通过停车线后加速行驶.
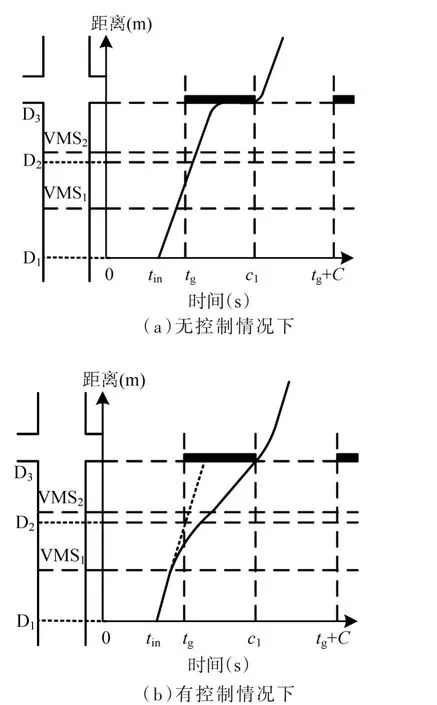
图2 头车时空轨迹示意图Fig.2 Spatio-temporal trajectory of first vehicle
因此,根据牛顿第二定律,头车的时空关系数学表达如下:

式中t1表示车辆以初速度v0匀速行驶到达VMS1的时长,即t1=L1v0;t减表示车辆减速的时长;t匀表示车辆减速后匀速到达停车线的时长.
联解式(2)和式(3),可以得到

从而,可以得到速度限制值为

此时可设置VMS1和VMS2都为速度限制值vL.
然而,在实际应用中,由于驾驶员或车辆性能原因,当车辆到达D2检测器时,检测器检测到车辆的速度与速度限制值相差过大,因此需要利用VMS2进行二次调整.如图3所示,为产生偏差后多级控制后的车辆时空轨迹图.
图中虚线表示正常情况下车辆的轨迹,轨迹1表示经过VMS1的速度控制后,发现车辆速度值过小,需要提升速度使得车辆能够在下个信号周期绿灯开始时通过交叉口;而轨迹2表示在经过D2检测后发现速度值过大,需要降低速度以便在下个信号周期绿灯开始时通过交叉口.

图3 多级控制时空轨迹示意图Fig.3 Spatio-temporal trajectory under multi-control
假设D2测得的速度值为v1,|| v1-vL≥δ,其中δ是允许的最大速度变化值.vL为VMS1显示的最初的速度限制值.车辆到达VMS2的时刻为tVMS2.同理,可得到头车的时空关系.

同理,得到时空关系:

综上所述可以得到VMS2的第二次速度控制值
3.2 车队的速度控制方法
根据前述头车控制方法,结合Newell跟驰模型,可以推倒得出跟驰车辆的轨迹、速度和加速度,最终得出车队中所有车辆的运行信息,但当前车静止时无法满足跟驰行为的非静止条件,需要根据牛顿第二定理对车辆的时空轨迹进行计算,车队的控制流程图如图4所示.

图4 车队控制流程图Fig.4 Control flow of following vehicles
如图5所示,为上述步骤3中判断过程的示意图.考虑第n辆车,n=2,3,4,…,如果第n辆车在进入控制区域后根据可变速度限制进行减速,它将面临两种情形:

图5 跟驰车辆的轨迹示意图Fig.5 Spatio-temporal trajectories of following vehicles
情形1表明,当第n-1辆车减速运行时,第n辆车为了保持安全距离也将减速运行;情形2表明,当第n辆车到达控制区域时,发现在当前周期内没有足够的时间以通过交叉口,此时总结车队中所有车辆的轨迹,同时可将该车作为下一车队的头车考虑.
4 仿真分析
4.1 仿真参数
控制区域范围为L=800 m;VMS布设位置为L1=200 m,L2=L3=300 m;行驶车道环境为单车道;安全距离为sj=20 m;最大的速度为vmax=15 m/s;车辆进入控制区域的初速度相同v0=15 m/s;加速度范围为a=[-5,5] m/s2;信号配时周期时长为C=100 s;绿灯时长Tg=50 s.
4.2 仿真结果分析
(1)时空轨迹分析.
通过MATLAB仿真模拟得到如图6所示的车辆时空轨迹图.如图6(a)所示,在无控制情况下,车辆将在到达停车线之前进行减速至0,红灯时间结束后再重新加速驶离.而当交通量较大时,由于延误累加,有的车辆需要经过2次停车才能通过交叉口.
如图6(b)所示,为信号交叉口绿色驾驶控制根据信号时长及车辆运行特征,它将连续的车辆队列划分为若干子队列,并使其在相应的绿灯时间内有序通过交叉口.受控情况下信号交叉口并未由于车辆受到强制速度降低而造成系统通行效率降低,同时车辆时空轨迹变得更加平缓,并减少了交叉口前车辆排队等待的时间,有效地降低了交叉口处的延误.
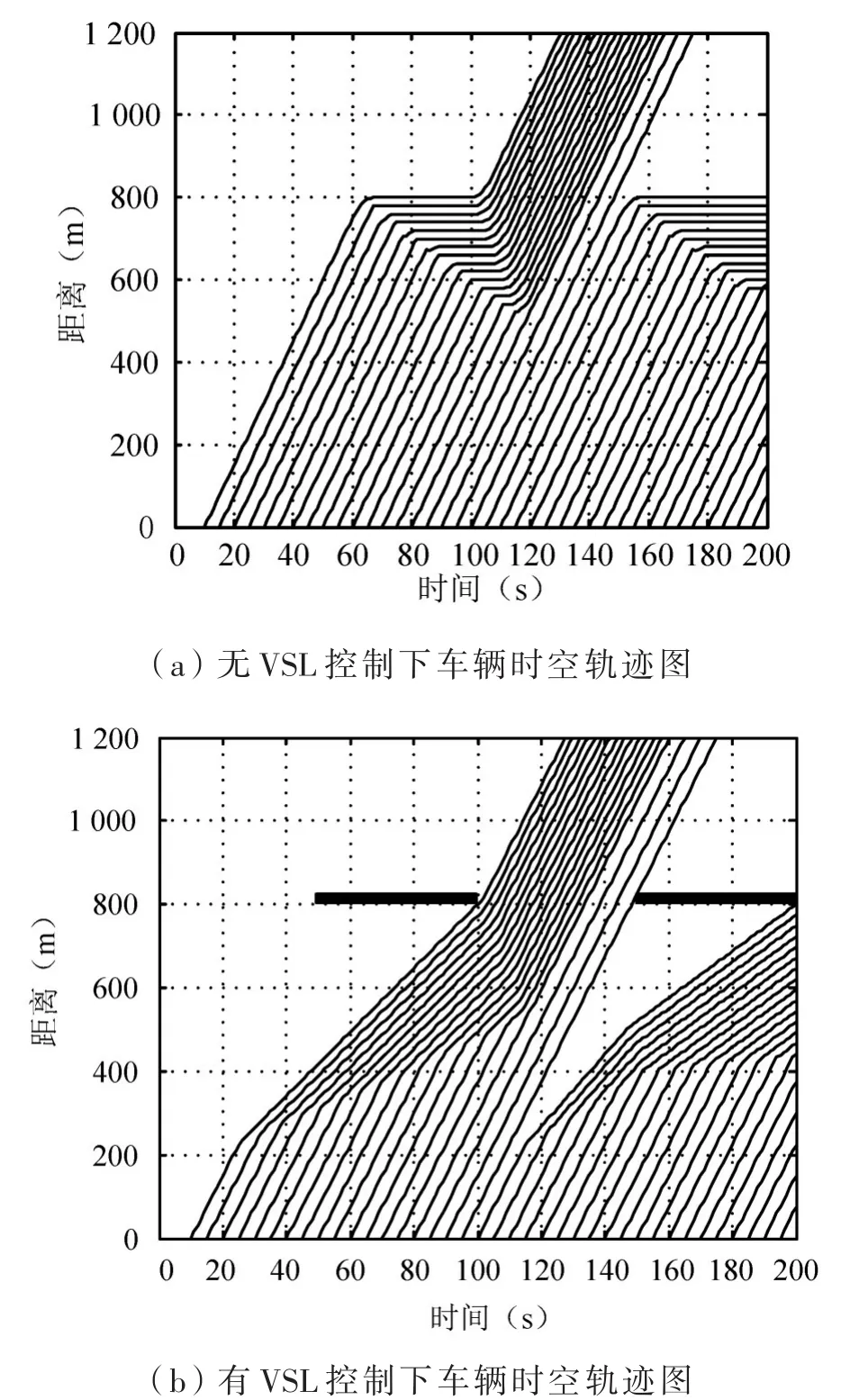
图6 车辆时空轨迹图Fig.6 Spatio-temporal trajectories of vehicles
(2)环境影响分析.
对不同交通量(360 pcu/h、720 pcu/h、900 pcu/h)情况下受控与无控制情况下的车辆燃油消耗及污染物排放进行仿真分析.
如图7所示,为360 pcu/h交通量下,有无控制对车辆燃油消耗及污染物排放的影响.

图7 360pcu/h下车辆燃油消耗及排放图Fig.7 The emission and fuel consumption under 360 pcu/h
由图7(a)可知,受控情况下交叉口车辆由于停车次数减少,速度波动小,CO排放峰值出现次数和排放量相对于无控制情况明显减少,虽然在某些时刻由于车速变化剧烈导致陡高的峰值出现,但在总体上,VSL能够减少29.3%的CO排放;由图7(b)可知,受控下的燃油消耗较无控制而言,波动较小,更加平滑,燃油消耗降低了17.8%.
如图8所示,为900 pcu/h交通量下,有无控制对车辆燃油消耗及污染物排放的影响.
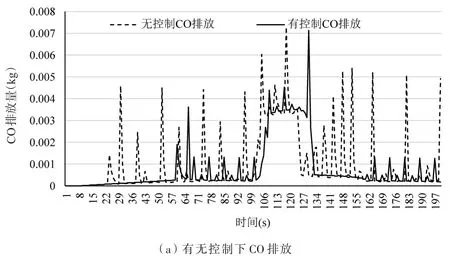

图8 900pcu/h下车辆燃油消耗及排放图Fig.8 The emission and fuel consumption under 900 pcu/h
由图8可知,随着交通量达到900 pcu/h,由于在交通量较高的情况下,控制变量的可控范围已经变得很小,即速度已经很小,控制效果受到了很大的限制,因此VSL控制对交叉口污染物排放及燃油消耗效果不好,CO排放减少7.0%,燃油消耗减少5.7%.
5 研究结论
本文提出的基于多级可变速度限制的信号交叉口绿色驾驶控制方法,是以信号交叉口为背景,对车队中的头车进行速度限制,通过对不同交通量情况下的节能减排效果进行模拟分析,证明该方法能够有效地减少交叉口处的延误,同时节能减排效果明显.但受制于速度限制值并非整个系统的最优值,因而节能减排效果不是最佳的,在后续研究中,将对速度限制值进行优化,以求在提升通行效率的同时降低系统燃油消耗与污染物排放量.另外,由于Newell跟驰模型存在“速度跳跃”现象,导致仿真得出的轨迹不够光滑.因此,在今后的研究中,将采用更加合适的跟驰模型,得到更加平滑的车辆运行轨迹,使实验结果更加准确.
[1]Barth M,Boriboonsomsin K.Real-world carbon dioxide impacts of traffic congestion[J].Transportation Research Record:Journal of the Transportation Research Board, 2008,2058(1):163-171.
[2]段荟,刘攀,李志斌,等.基于强化学习的汇流瓶颈区可变限速策略研究[J].交通运输系统工程与信息,2014,14(1):55-61.[DUAN H,LIU P,LI Z B,et al. Variablespeedlimitcontrolatfreewaymerge bottlenecks based on reinforcement learning[J].Journal of transportation systems engineering and information technology,2014,14(1):55-61.]
[3]王薇,杨兆升,赵丁选.有限阶段马尔可夫决策的可变限速控制模型[J].交通运输工程学报,2011,11(5):109-114.[WANG W,YANG Z S,ZHAO D X.Control model of variable speed limit based on finite horizon Markov decision-making[J].Journaloftrafficand transportation engineering,2011,11(5):109-114.]
[4]李杨.高速公路可变速度控制方法研究[D].西安:长安大学,2011.[LI Y.New variable speed control approach for freeway[D].Xi’an:Chang’an University, 2011.]
[5]Ahn S,Cassidy M J,Laval J.Verification of a simplified car-following theory[J].Transportation Research Part B: Methodological,2004,38(5):431-440.
[6]Ahn K,Rakha H,Trani A,et al.Estimating vehicle fuel consumption and emissions based on instantaneous speedandaccelerationlevels[J].Journalof Transportation Engineering,2002,128(2):182-190.
[7]Sun J,Chen S.Dynamic speed guidance for active highway signal coordination:Roadside against in-car strategies[J].IET Intelligent Transport Systems,2013,7 (4):432-444.
[8]Chen W,Bai Y,Yang X.Delay estimation under a dynamicspeedcontrolbasedintersection[C]. Washington,D.C.92th Annual Meeting of TRB,2013 (13-2570).
A Green Driving Speed Control Method at Signal Intersection
AN Shi,YAO Han-dong,JIANG Hui-fu,CUI Jian-xun
(Harbin Institute of Technology,Harbin 150001,China)
Signal intersection is the traffic distribution interchange in the whole urban traffic road network. Vehicles often stop at an intersection that results in idle driving,severely reduces the intersection traffic efficiency,and causes serious vehicle exhaust pollution.In order to reduce the blocking of traffic flow of intersection,and reduce the delay,fuel consumption and emission of vehicle at signal intersection,this paper proposes a green-driving control method for signal intersection based on multi-level variable speed limit. This method uses the value of variable speed limits as control variable,and utilizes the information of traffic condition near the intersections obtained by fixed detectors to optimize and release the value of variable speed limits in real-time,to smooth the spatio-temporal trajectories without extra travel time in the process of driving to the intersection.Then we made a simulation and verification of this method by combining Newell's following model and VT-micro vehicle fuel consumption and emissions model.The result shows that it can reduce vehicle delay,fuel consumption and pollution emissions effectively.
traffic engineering;green driving;variable speed limit;signal intersection;traffic simulation
1009-6744(2015)05-0053-07中图文分类号:U491.4
A
2015-03-30
2015-05-26录用日期:2015-06-04
安实(1968-),男,河北人,教授,博士生导师. *
anshihit@126.com
