基于微传感器的智能车灯调节系统(AFS)
2015-08-05王凡
王凡
摘 要 针对目前汽车前照大灯机械式的调光系统,AFS(adaptive Front—lighting System)提供了一种基于微米传感器的智能汽车前照灯调节系统,核心器件为多个微米传感器和两组调节步进电机。传感器包括采集光强信息的CMOS光电传感器、采集转弯角度的转弯传感器、测量车辆上下坡角度的微陀螺仪和微速度计。安装在左、右车灯上的调节步进电机可控制大灯在水平和垂直两个方向上的运动。基于此,AFS可根据汽车行车环境及状态的即时调整车灯作用范围和光照强度实现了车灯调节的智能化,大大降低了夜间行车的安全隐患。
关键词 AFS微传感器
中图分类号:TP183 文献标识码:A DOI:10.16400/j.cnki.kjdks.2015.07.068
Adaptive Front-lighting System (AFS) Based on Micro-sensors
WANG Fan
(School of Astronautics, Northwestern Polytechnical University, Xi'an, Shaanxi 710072)
Abstract Aiming at the former car headlamps mechanical dimming system, AFS (adaptive Front-lighting System) provides a sensor-based smart car headlights micron conditioning system, the core device for multiple micron sensors and two-step adjustment into the motor. Light intensity sensor includes collecting information CMOS optical sensor, turning angle of turn sensor capture, measure the angle of the vehicle downhill micro gyro and micro speedometer. Adjust the stepper motor is mounted on the left and right headlight headlight movement can be controlled in both horizontal and vertical. Based on this, AFS can instantly adjust the light intensity headlights scope and adjust the lights to achieve the intelligent car driving environment and according to the state, greatly reducing the security risks of driving at night.
Key words AFS; micro-sensors
0 引言
汽车行驶安全是当今世界研究的一大主题,而夜间行车照明不佳是导致交通高事故率的重要原因。根据统计显示,夜间行车发生重大事故次数的比例约为白天的1.5倍,60%的事故发生在照明不佳的弯道处。汽车大灯作为一个照明装置,与夜间开车或在不同环境下的安全驾驶有着紧密的联系。汽车车灯系统中,前组合灯最为复杂。一般来说,前组合灯主要由远光、近光、转向信号灯、位置灯等组成。其中远光和近光的配光是设计的重点和难点。目前我国的汽车大灯普遍使用HID气体放电灯,通常又叫氙气灯。氙气灯具备更远的照射距离,但如果两辆车迎面行驶,而且距离比较近的时候,就容易造成对方炫目,视线不清,存在安全隐患。对于夜间行车经验不足、对需要变换远近灯光的操作尚不熟练的司机,或者夜间路面情况复杂多变不易察觉,打远光灯虽然可以增加照明亮度和视线距离,但极可能酿成车祸。
另一方面,目前机械式汽车车灯调节系统只能提供固定的光照范围而不能根据汽车的行车环境和状态改变车灯的光照范围和强度,具有很大的局限性。AFS可在原有车灯机械调节的基础上实现车灯的智能调节,降低了目前由于汽车大灯固定的照射范围和光照强度给汽车夜间行车带来的安全隐患,使驾驶者获得更好的观测效果,避免视觉盲区。
1 系统组成
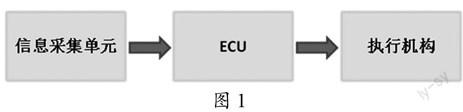
该装置包括安装在汽车上的信息采集单元,主控ECU和执行机构。
1.1 信息采集单元
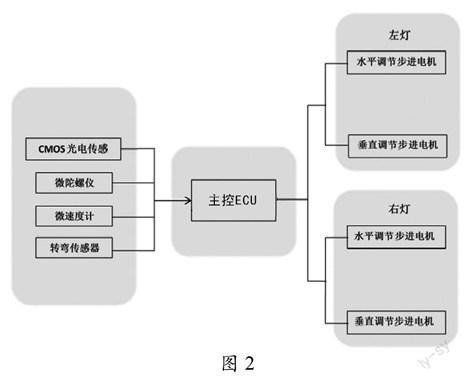
信息采集单元由多个传感器组成,其核心元件包含:采集光强信息的CMOS光电传感器;采集转弯角度的转弯传感器;测量车辆上下坡角度信息的微陀螺仪以及微速度计。信息采集单元的输出端与主控ECU连接。
1.2 主控ECU
ECU作为信息处理和控制元件,由微处理器、存储器、输入/输出接口、模数转换器以及整形、驱动等大规模集成电路组成。ECU从输入接口接收信息采集单元传送来的信息,微处理器对信息加以分析并根据分析结果发出控制命令,通过输出接口将命令信号传送给执行机构。
1.3 执行机构
执行机构接收ECU发出的命令并作出相应的调整措施:其核心器件为两组可以带动车灯运动的调节步进电机,分别安装在车的左、右灯上,两个电机分别控制车灯的水平方向的运动和垂直方向的运动,以此来控制车灯的作用范围和光照强度。
附图说明:
图 1
图2
图1表示本实用新型装置智能调光系统的主要结构示意图;图2表示本实用新型装置智能调光系统的具体结构示意图。
2 工作原理
该设计是一个由信息采集系统(传感器组)、主控ECU和执行机构组成的系统。由于需要对多种车辆行驶状态做出综台判断,客观上决定了这是一个多输入多输出的复杂系统。
汽车的行车环境和状态包括:周围环境的光亮程度,汽车的转弯角度、上下坡角度以及车速。汽车要获取这些信息,需要依靠于各种传感器。根据实际情况,在该设计中使用了采集光强信号的CMOS光电传感器,采集上下坡信息的微陀螺仪,采集转弯信息的转弯传感器以及采集速度信息的微速度计。信息的处理则依赖于“车载电脑”即主控ECU。而对于灯光调节的具体实现则是依赖于四个电动机,分别控制水平、垂直方向车灯的调节。
2.1 传感器组
CMOS光电传感器的工作过程以照相机成像技术为基础,具体工作过程如下:当对面一定距离内有车辆行驶过来时,CMOS可捕获一定范围内光照最强点,最弱点,光强差和平均光强。捕获到的光信号经光电转换后直接产生电流(或电压)信号,传送给主控ECU,ECU根据传递过来的电信号做出判断调整灯光作用范围和光照强度,避免由于车灯灯光过强而给对方车辆造成眩光。
采集转弯角度的转弯传感器安装在车轮上,当车辆转弯时,转弯传感器通过测量车轮与车身之间的夹角确定转弯角度并将数据传送给ECU;微陀螺仪用来测量车辆上下坡的行车角度,微速度计则采集速度信息。主控ECU分析采集到的信息同时控制电机调整车灯作用范围,降低因转弯和上下坡造成的视野盲区而给行车带来安全隐患。
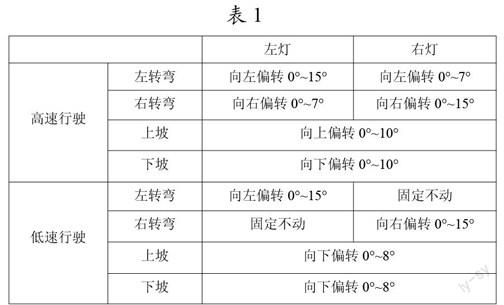
根据不同的行车状态,车灯的调节角度存在差异:前轮偏转角小时,头灯转角要小;前轮偏转角大时,头灯转角也要大。当车速较高时,驾驶员相对注重远视距的路面情况,头灯转角相对大一些;车速较低时,驾驶员相对注重较近视距的路面情况,头灯转角相对小一点。具体参数如表1。
2.2 电动机组
电动机分为左右两组,每组各有两个内置式调节式电动机,分别为水平调节步进电动机和垂直调节步进电动机,分别安装在前照灯的左、右灯上,控制左、右灯的水平和垂直方向的运动。调节系统中的电动机多采用小功率直线型调节电动机。
表1
3 结束语
随着科学技术的发展,微纳米技术逐渐走进我们的生活,其体积小、造价便宜、使用方便等特点使得微纳米元件具有很好的市场前景。微纳米技术与智能技术的结合更是适应了当前时代的发展。就目前的汽车市场来看,我国的智能车灯的发展才刚刚起步,拥有前照灯亮度感应调节及远近光灯自动切换功能的车型较少,只限于配置要求较高的高档轿车,我们的研究应遵循低成本的宗旨,使得我们的研究成果可以适应于广泛的普通车型以便于广泛的推广。其次,我们在此研究成果的基础上仍然保留了汽车原有的机械式操作的功能,使得汽车的行车安全性更为可靠。
参考文献
[1] 何城中,张时.基于DSP的智能车灯系统[会议论文].2008.
[2] 王焘,陈文强,韦兴民,赵福全.汽车车灯调光系统简述.汽车电器,2013(2).
