井架排管机器人研制
2015-08-04蒋壮强郝丽军南阳二机石油装备集团有限公司河南南阳473006中国石油技术开发公司北京0008
蒋壮强,崔 凯,张 勇,郝丽军,张 昶(.南阳二机石油装备(集团)有限公司,河南 南阳473006;.中国石油技术开发公司,北京0008)
井架排管机器人研制
蒋壮强1,崔凯2,张勇1,郝丽军2,张昶1
(1.南阳二机石油装备(集团)有限公司,河南南阳473006;2.中国石油技术开发公司,北京100028)
排管机器人用于在二层台排放架与井口之间抓取与排放钻杆,是钻井平台钻杆自动排放系统中最为繁忙的装置,在提高钻井安全性及经济性方面发挥着重要的作用。介绍了井架排管机器人的总体机械结构及主要技术参数、液压控制原理。本设备适合于X-Y型排管架结构,具有结构简单、操作灵活可靠、运动稳定、操作空间大等优势,适合于陆地橇装钻机平台、海洋钻机平台立根自动排放操作。
排管机器人;陆地钻机;海洋钻机
随着对钻井效率及安全性要求的不断提高,钻机自动化已成为石油钻机未来发展的方向。井口的机械化装置是其自动化钻机的关键部分,而实现石油钻机井口机械化、自动化的关键则是钻杆排放系统[1]。
井架排管机器人是针对陆地、海洋钻井作业中的起下钻排管作业而研制的自动化专用钻机配套设备,它能够将指梁内的立根移运到井口设定位置并交给顶驱,或者将顶驱上的立根按要求排进指梁内,为钻机的排管作业安全性提供了可靠的保证,消除了起下钻作业对二层台井架工的依赖。在起下钻作业过程中,该装置承担对钻杆夹持、提升、下放、平移和回转等操作,实现钻具在钻台与二层台之间的自动输送、排放、储运等;还可与动力辅助鼠洞、铁钻工配合完成单根接成立根操作,不再需要人工直接参与,从而让钻井工远离危险区域。自动排管装置减轻了工人劳动强度、降低了井架工的操作风险,同时提高了钻杆排放的自动化水平和工作效率,是实现安全、健康钻井和提高钻井效率的有效途径[2-3]。
国内对钻杆自动排放系统的研究起步较晚,只有少数单位做过一些技术上的研究和设计。到目前为止,国内研发的钻杆自动排放系统还没有形成工业性产品,因此,国内绝大部分陆地钻机以及海洋钻机的钻杆排放还是采用传统的人工操作方式。
南阳二机石油装备(集团)有限公司经过多年的技术攻关,提出了一种安装在二层台中间走道下方的排管机器人的设计方案,并已制作出样机。
1 总体结构方案设计
1.1技术参数
液压系统工作压力8MPa
机械臂水平伸展距离3m
滑移系统最大速度300mm/s
旋转机构最大旋转速度30°/s
回转角度0~180°
二层台安装高度24.5mm
适用管柱规格73.0~139.7mm
1.2总体结构
排管机器人主要用于在井口与钻台排放架之间往返自动移送钻杆立根,还可与钻杆自动上下钻台系统、动力辅助鼠洞、铁钻工配合完成离线单根接成立根操作,而不需要借助起升系统,不影响钻进。XY型排放架内可以存放较大数量的钻杆,移动钻杆方便,排放架指梁可以调节,可以满足不同直径管柱的要求,故海洋/陆地钻井平台广泛采用XY型排放架。本文设计方案适合X-Y型排管架结构。
排管机器人主要由滑移旋转机构、连杆机构、机械臂总成、移动导轨等部分组成,如图1所示,整个装置放置在二层台中间走道下面。滑移旋转机构是铁架工的核心承载模块,设计有移动小车及旋转机构。工作时,移动小车可带动整个装置在中间走台下面往复运动,以便在不同的排放架位置进行取放钻杆立根操作;回转机构可使连杆机构及机械手模块绕回转轴旋转180°,实现机械手的朝向在井口、左排放架、右排放架间的转换。机械手面向井口时,允许机械手在井口进行立根操作;面向排放架时,允许机械手在指梁内取放立根。
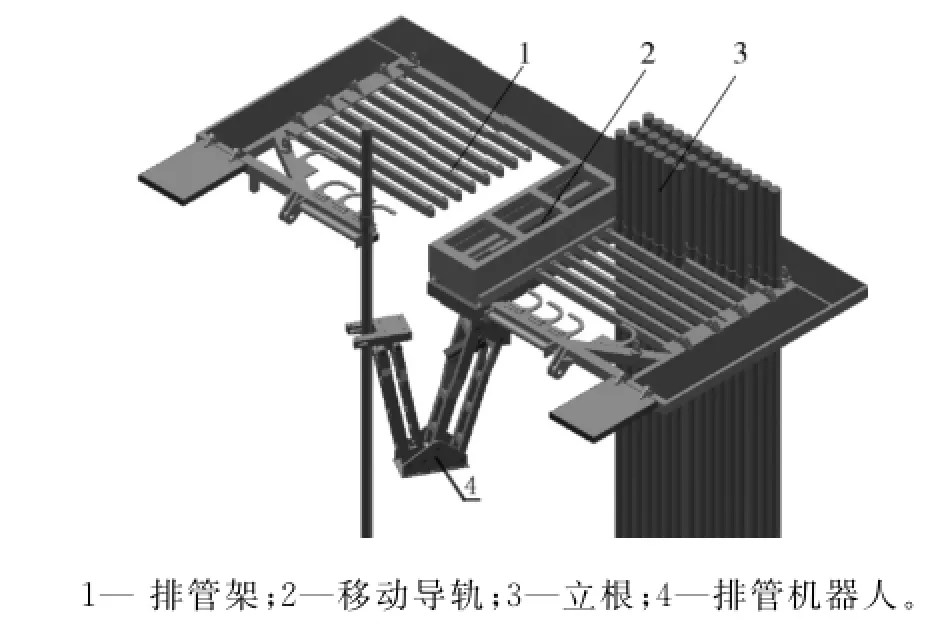
图1 排管机器人整体结构
1.3滑移旋转机构
滑移旋转机构的功能是实现装置的整体平移及连杆机构与机械手模块的旋转运动,如图2所示。
滑车架是滑移旋转机构的保护外壳,内部设有驱动轮总成、从动轮总成、液压马达、回转机构、回转缸、齿轮机构。液缸马达为滑动小车提供移动的动力,回转缸为机械臂转动提供转矩[4]。

图2 滑移旋转结构
1.4机械臂总成
机械臂总成主要由旋转座、主动杆Ⅰ、主动杆Ⅱ、从动杆Ⅰ、从动杆Ⅱ、伸缩液压缸、连杆座、驱动快、机械手总成组成,主要实现机械手的伸出与收回等动作,如图3所示。
该总成顶部是旋转座,通过销轴与旋转机构及连杆相连,是机械臂动作的传力者。当液压缸伸长时,推动主动杆Ⅱ向前摆动,在连杆座及驱动块的作用下,主动杆Ⅰ、从动杆Ⅰ、从动杆Ⅱ及机械手同步向前移动。回转缸转动时,回转轴将扭转力矩传递给机械臂总成,实现机械臂总成0~180°旋转。
此机械臂结构仅用一个液压缸,便可实现4根连杆的联动,且液压缸较小的行程可实现机械手较大的水平位移;连杆机构的平行四边形结构保证了机械手始终处于水平状态。

图3 机械臂总成结构
1.5机械手总成
机械手总成主要由盒体、液压缸、弹簧座、弹簧、连杆、挡块等部件组成,如图4所示。液压缸缩回时,弹簧作用于弹簧座及连杆,使挡块处于关闭状态,立根被限定在机械手前段的U形槽内。当机械手端部的液压缸伸出时,推动弹簧座及连杆,使挡块向内侧旋转,挡块打开,立根可以与机械手脱离。

图4 机械手总成结构
2 液压系统及控制原理
液压系统及控制原理如图5所示,液压系统工作压力8 MPa,采用开式循环结构。各个液压元件顺序动作,由PLC控制电磁阀来控制液压缸液压马达的动作,同时由行程开关以及传感器把信号反馈给PLC来控制机械结构运动位置。
为防止重力超速,在伸缩臂运动回路上安装限速阀,小车移动回路安装位移传感器及缓速阀。
通过远程监控可视系统,操作人员可在司钻房内对取放立根进行远程控制,不仅提高了工作效率,而且降低了钻井工人的劳动强度。

图5 液压系统原理
3 创新点
井架排管机器人具有结构简单、体积小、质量轻、动作稳定可靠、安装方便等特点。创新点如下:
1)滑移旋转机构采用独特的箱式结构,将移动、旋转两个功能集成在一个箱体内,结构紧凑,安装方便。此结构已申请实用新型专利[5]。
2)机械臂总成采用全新的连杆结构,较小的液压缸行程便可实现机械手较大的位移。
4 结论
1)通过样机试验,排管机器人的动作稳定可靠,符合设计要求。
2)滑移旋转机构采用独特的箱式结构,将移动、旋转两个功能集成在一个箱体内,结构紧凑,安装方便。全新的机械臂结构,使连杆运动轻便灵活。
3)在进行液压系统设计时,未过多考虑执行件的速度控制问题。
4)排管机器人对提高钻井自动化、安全性、经济性等方面具有重要意义,可以推广应用于陆地钻机、海洋钻井平台。
5)在机械手夹持方式及液压回路控制方面应继续进行研究,提高机械手夹持钻杆的性能,并实现执行件速度的动态控制。
[1]张先余.自动化钻机二层台钻杆排放技术的研究[D].东营:中国石油大学,2012.
[2]刘文庆,崔学政,张富强.钻杆自动排放系统的发展及典型结构[J].石油矿场机械,2007,36(11):74-77.
[3]崔学政,刘文庆,肖文生,等.海洋钻井平台立柱式排管机设计[J].石油矿场机械,2010,39(1):45-49.
[4]中国有色工程设计研究总院.机械设计手册:3卷[K].北京:化学工业出版社,2008.
[5]蒋壮强,王德余.新型滑移旋转小车:中国,CN204457498U [P].2015-07-08.
Research and Manufacture of Mast Handling Robot
JIANG Zhuangqiang1,CUI Kai2,ZHANG Yong1,HAO Lijun2,ZHANG Chang1
(1.RG Petro-Machinery(Group)Co.,Ltd.,Nanyang 473006,China;2.China Petroleum Technology&Development Corporation,Beijing 100028,China)
Handing robot plays a very important role in improving safety and cost cutting of drill-ing rig,which is used for handling drilling pipes between the well center and set back area.Pipe-racking on drill floor is the most frequent procedure in automated pipe racking operation of drill-ing platform.In this paper,the general design of mast handing robot is provided,main parameter s of the mechanisms are introduced,hydraulic system chart and control mode of the mechanisms are presented.The device introduced in this paper is fits for X-Y type racking platform,which has many advantages like simple structure,simple and reliable operation,working stability,larger working range.The device can be used on land drilling rig and sea drilling rig for pipe racking op-eration.
handing robot;land drilling rig;sea drilling rig
TE928
B
10.3969/j.issn.1001-3482.2015.12.014
1001-3482(2015)12-0055-04
2015-08-05
河南省重大科技专项“智能化斜直井钻机关键技术研发及产业化”(141100210700);“自升式海洋钻井平台钻机的研发及产业化”(111100210500)
蒋壮强(1983-),男,河南南阳人,工程师,硕士,现从事石油钻井设备的研究开发工作,Email:jzhuangqiang2014 @163.com。
