基于LSSVM的污水处理过程预测控制
2015-07-28宋翼颉王欣湖南工业大学电气学院湖南株洲412007
宋翼颉,王欣(湖南工业大学 电气学院,湖南株洲 412007)
基于LSSVM的污水处理过程预测控制
宋翼颉,王欣
(湖南工业大学 电气学院,湖南株洲 412007)
摘要:针对污水处理过程中硝态氮难以控制的特点,提出了基于LSSVM的模型预测控制算法,从而提高控制的精度和效率。仿真结果表明,在相同扰动下,基于LSSVM的预测控制算法能够将硝态氮浓度稳定在1±0.1之间,而PI控制算法只能将硝态氮浓度稳定在0.1到1.2之间。从而验证基于LSSVM的预测控制算法比PI控制性能更好。
关键词:污水处理过程;最小二乘支持向量机(LSSVM);模型预测控制
本文引用格式:宋翼颉,王欣.基于LSSVM的污水处理过程预测控制[J].新型工业化,2015,5(8):33-38
Citation: SONG Yi-jie, WANG Xin. Prediction Control of Wastewater Treatment Process Based on LSSVM[J]. The Journal of New Industrialization, 2015, 5(8): 33-38.
0 引言
70年代后期,在美国,法国发达国家的工业过程领域内出现了一系列新型计算机控制算法,其中包括动态矩阵控制(DMC)、模型算法控制(MAC)[1]。这类算法使用被控对象的阶跃响应或者脉冲响应建立预测模型,采用滚动优化的方法对过程控制实现优化控制,并且已经在实际应用中表现出良好的效果[2]。
随着工业过程不断的提出更高的要求,控制理论不断取得新的突破,预测控制在这样一种环境中产生了。现代控制理论早在80年代就形成了,并在航空航天领域得到了广泛的应用[3-4]。其中,现代控制理论中的状态空间法提供了更高层次的分析方法和设计方法[5]。
特别的,早已趋于成熟的基于系统性能指标的设计方法在理论上提出了能够有效提高控制质量和经济效益的方法,这吸引着大量的控制工程师对其进行开发和研究。然而,理论与实践之间存在巨大差异[6]。这体现在了这几个方面:
(1)现代控制理论的起点是对象精确的数学模型,而在工业过程中所涉及的对象往往是多输入、多输出的高维复杂系统。
(2)工业对象的结构、参数和环境都具有很大的不确定性。这些不确定性会使得理想模型得到的最优控制在实际应用上很难保持最优。
(3)工业控制中必须考虑到控制手段的经济性,即对工业控制计算机的性能不能要求太高。
这些来自实际应用上的困难,阻碍了现代控制理论在复杂工业过程中的有效应用,也向控制理论基础提出了新的挑战。
为了克服理论和应用之间的不协调。70年代以来,除了加强对系统辨识、模型简化、自适应控制、鲁棒控制等的研究外,人们开始打破传统方法的约束,试图面对工业过程的特点,寻找各种对模型要求低,控制综合质量好,在线计算方便的优化控制新算法。在此期间,数字计算机技术的飞速发展,也为新算法的产生提供了物质基础[7-8]。预测控制就是在这种背景下发展起来的一类新型计算机优化控制算法[9-10]。
污水处理过程是一个强耦合、非线性的工业过程。即使是理想状态下污水处理过程的机理模型,其微分方程也均为非线性。传统的预测控制的内部模型通常使用参数模型和非参数模型。但是污水处理过程的参数模型运行效率过于低下,而非参数模型又很难精确预测。因此传统的模型预测控制在污水处理过程上的控制效果并不理想。
1 机理模型
污水处理过程的机理模型现在最为广泛认可的就是基准仿真1号模型(BSM1)。基准仿真1号模型是由国际水协会(IWA)在2003年所开发的一个仿真协议。考虑到BSM1已成为国际上广泛认可的标准,同时也为了提高仿真结果的可接受性,本文将使用BSM1作为被控对象的模型,并与国际水协会给出控制策略进行比较。
BSM1的设备布局如图1所示,1号池和2号池为缺氧反应池,3号池、4号池和5号池为好氧反应池。图中的实线箭头表示水流流向,虚线箭头表示控制信号流向。污水进水先经过缺氧区,然后再经过好氧区,然后流入沉淀池。从5号池出来的混合液一部分需要回流,和入水一起进入生化反应区,这一部分通常称为内回流。经过沉淀的混合液的上层清液排出到自然界,下层污泥则回流到1号池前端,和入水混合后一起进入生化反应区,这一部分通常称为外回流。

图1 BSM1设备布局Fig.1 The layout of BSM1 equipment
为了达到良好的除氮效果,国际水协会在BSM1中给出了如下的控制策略,通过控制五号反应池中的氧转移系数使得五号池出水中的溶解氧含量达到稳定;另外通过控制内回流液的流量来控制二号反应池出水中的硝态氮浓度。控制系统框图如图2所示,内回流流量Qa和5号池溶解氧转移系数kLa,5为控制量,2号池出水硝态氮浓度SNO,2和5号池出水溶解氧浓度SO,5为被控量,入水的流量Qin和组分Zin为扰动。
基准仿真1号模型中所有的控制器均采用PI控制器,并且国际水协会提供了这些PI控制器的所有参数。国际水协会提供的PI参数值如表1所示。

图2 PI控制下的控制系统框图Fig.2 The control system diagram in PI controlling
基准仿真模型实际上就是一个描述污水处理过程的机理模型,由145个微分方程所组成。因此BSM1的仿真实际上就是解这一组微分方程。考虑到求解微分方程方面的高效性,本文采用MATLAB/SIMULINK来建立基准仿真1号模型。同时,为了模型的求解速度,基准仿真模型中的模块均使用S函数编写。

表1 BSM1中的PI控制器参数Tab.1 The parameters of PI controller in BSM1
国际水协会提供了基准仿真模型中的所有参数。同时还提供了基准仿真模型中微分方程的初值和不同天气条件下入水的数据。干燥天气下污水入水的流量随时间变化的曲线如图3所示,入水流量呈周期变化,变化幅度在区间[10000,33000]内。
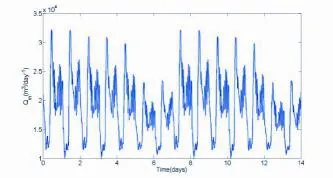
图3 入水流量变化曲线Fig.3 Influent flow curve
图4为SIMULINK环境中的BSM1模型,硝态氮的设定值为1,溶解氧的设定值为2,图中的subsystem1模块为溶解氧的PI控制器,subsystem2模块为硝态氮的PI控制器,左上角的measure模块为测量模块,其余模块为被控对象的组成部分。

图4 在SIMULINK环境中搭建的BSM1 Fig.4 BSM1 established in Simulink
将仿真时间设定为[0,2],并使用表1中的PI参数,干扰为国际水协会提供的干燥天气的入水数据,其中入水流量如图3所示,即可以得到如图5和如图6的仿真结果。从图6可以看出溶解氧的控制较为精确,这是因为溶解氧可以通过外部补充,从而使得溶解氧达到稳定,因此PI控制器基本能够将溶解氧控制稳定。另外,从图5可以看出,硝态氮的控制非常糟糕,甚至连达到稳定都很难。这主要是因为硝态氮的稳定纯粹依赖污水处理系统内部的处理能力,同时进水中不断变化的组分浓度对硝态氮的影响非常大。所以,需要一个行之有效控制算法来控制硝态氮含量。那么接下来将建立基于LSSVM的预测控制仿真模型,并验证该控制算法能对硝态氮进行有效控制。
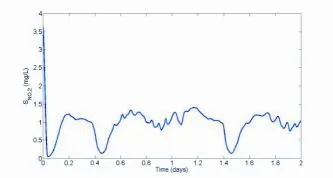
图5 BSM1闭环模型仿真SNO,2的变化曲线Fig.5 The curve of SNO,2in simulation of BSM1 closed loop model
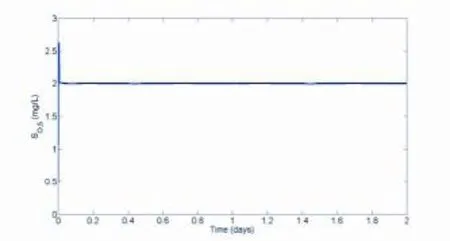
图6 BSM1闭环模型仿真SO,5的变化曲线Fig.6 The curve of SO,5in simulation of BSM1 closed loop model

图7 预测控制的结构框图Fig.7Structure of predictive control
2 基于LSSVM的预测控制
模型预测控制的结构如图7所示。
预测控制实际上就是在每一个采样时间对预测控制器的内部模型进行寻优,从而得到下一时刻控制器的最优输出。由于预测控制引入了对象的实际输出作为内部模型的误差补偿,所以预测控制是一个闭环控制。对于一些非线性程度不强的被控对象,预测控制基本可以达到比较好的效果。
由于预测控制器在每个步长都要进行优化,所以其控制器的及时性比较差。但是对于过程控制来说,控制周期比较长,因此预测控制在过程控制系统中的控制效果一般会比较好。但是,整个控制系统的性能很大程度上取决于预测模型的精确度。传统预测控制方法提供了两种形式的内部模型,分别是参数模型和非参数模型。但是这两种模型均是在对被控对象进行了一定线性化的假设之后,才能得出的模型。对被控对象这样的处理会导致预测控制器内部模型的不精确。对于污水处理过程对象来说,扰动量不止一个,并且对被控对象的影响非常大。所以,对于污水处理过程这样一个非线性强耦合、多扰动的对象,传统的预测控制很难达到要求。
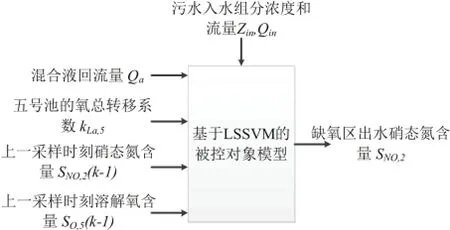
图8 基于LSSVM的污水处理过程对象模型的结构Fig.8 Structure ofobject model of wastewater treatment process based on LSSVM
综上所述,传统预测控制严格的结构造成了其在污水处理上的应用的困难。为了达到污水处理过程控制的要求,需要一个非线性模型作为预测控制器的内部模型。本文采用LSSVM来建立硝态氮预测模型,作为预测控制器的内部模型。预测控制内部的优化算法则使用粒子群算法。
首先,使用BSM1的仿真结果离线训练基于LSSVM的污水处理过程对象模型。LSSVM的被控对象模型结构如图8所示,由于机理模型中的微分方程均为一阶,所以被控对象当前的输出可以认为与上一采样时刻的状态量SNO,2(k-1)和SO,5(k-1)相关。然后即可在SIMULINK环境中建立如图9所示仿真模型,左侧的subsystem模块为基于LSSVM的预测控制器,控制器的输出为内回流流量,溶解氧的控制器依然使用BSM1中给出的PI控制器。由于算法的复杂性,预测控制器模块采用S函数编写。
将仿真时间设定为0到1,与PI控制的仿真模型使用相同的给定和干扰进行仿真,可以得到硝态氮和溶解氧随时间变化的曲线分别如图10和图11所示。

图9 基于LSSVM的预测控制污水处理过程仿真模型Fig.9 Simulation model ofwastewater treatment process in predictive controller based on LSSVM
如图10所示,硝态氮的波形在时间区间[0,0.01]上就进入了稳定状态。随后,硝态氮的含量一直稳定在区间[0.9,1.1]内。可以看出,硝态氮含量稳定后一直在区间[0.9,1.1]内来回抖动。这是因为入水中的组分随时间不断变化,并且对硝态氮的冲击较大,因此控制器需要一定时间调整,再加上LSSVM预测模型的误差,所以硝态氮只能稳定在某个区间内。溶解氧的控制如图11所示,可以看出溶解氧的控制效果在时间0到0.4之间受到了比较微弱的干扰。
为了PI控制器和基于LSSVM预测控制器的控制效果更加明显,在两种控制模型中引入IAE准则:

式(1)中,e(t)为实际输出与给定的误差,
tf为采样终止时间,t0为采样起始时间。将两种控制策略仿真时间统一为[0,1],即可得到如表2所示的IAE指标:
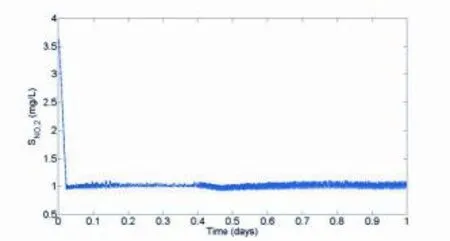
图10 基于LSSVM的预测控制下的硝态氮仿真结果Fig.10 Simulation result of nitrate nitrogen in predictivecontroller based on LSSVM

图11 基于LSSVM的预测控制下的溶解氧仿真结果Fig.11 Simulation result of dissolved oxygen in predictive controller based on LSSVM

表2 两种控制策略下的IAE指标Tab.2 IAE indexes in two control strategy
基于LSSVM预测控制策略的SNO,2的IAE指标只有PI控制策略下硝态氮的IAE指标的10%,不难看出基于LSSVM预测控制策略对硝态氮的控制效果较好。由于SO,5依然采用PI控制策略,并且基于LSSVM预测控制策略下内回流流量的变化较为剧烈,对SO,5产生了一定影响,所以基于LSSVM预测控制策略下SO,5的IAE指标比PI控制策略下稍大,但是从图11来看,SO,5依然能够稳定在给定±0.04附近。
3 结论
本文从传统预测控制的缺点出发,对传统预测控制算法进行了改进。使用非线性拟合效果更好的LSSVM代替了传统预测控制中的预测模型,并使用寻优效果更好的粒子群算法代替了传统预测控制原来的优化算法。并使用这种新的预测控制算法对硝态氮进行控制。
经过仿真可以看出,传统的PI控制器只能使得硝态氮稳定在区间[0.2,1.4]内,根本无法达到需求的控制效果。但是本文提出的新的控制算法可以将硝态氮含量稳定在区间[0.9,1.1]内,并且可以将硝态氮在仿真开始的0.01秒内达到稳定。综上所述,基于LSSVM的预测控制算法不仅可以使得难以控制的硝态氮稳定,还可以使得硝态氮含量在一个较短的时间内收敛。
参考文献
[1] 席裕庚,李德伟,林姝. 模型预测控制——现状与挑战[J]. 自动化学报,2013,03:222-236. Y G Xi,D W Li,Z Lin. Model Predictive Control --Status and Challenges[J]. ActaAutomaticaSinica,2013,03:222-236.
[2] 席裕庚,李德伟. 预测控制定性综合理论的基本思路和研究现状[J]. 自动化学报,2008,10:1225-1234. Y G Xi,D W Li. Fundamental Philosophy and Status of Qualitative Synthesis of Model Predictive Control[J]. ActaAutomaticaSinica,2008,10:1225-1234.
[3] 戴文战,娄海川,杨爱萍. 非线性系统神经网络预测控制研究进展[J]. 控制理论与应用,2009,05:521-530. W H Dai,H C Lou,A P Yang. An overview of neural network predictive control for nonlinear systems[J]. Control Theory & Applications. 2009,05:521-530.
[4] 许芳. 快速模型预测控制的FPGA实现及其应用研究[D].吉林大学,2014. F Xu. FPGA Implementation and Application of Fast Model Predictive Control[D]. Jilin: Jilin University,2014.
[5] 段向军. 基于神经网络的预测控制方法研究[D].大庆石油学院,2005. X J Duan. Research on predictive control method based on Neural Network[D],Daqing: Northeast Petroleum University,2005.
[6] 安宝冉. 基于预测控制的网络化系统若干控制问题研究[D].哈尔滨工业大学,2014. B R An. Several control problems of networked systems based on predictive control[D]. Harbin: Harbin Institute of Technology.
[7] 顾夏声.污水处理数学模型(第二版)[M].北京:清华大学出版社,1993. X S Gu. Mathematical model of wastewater treatment[M]. 2nd,Beijing: Tsinghua University press,1993.
[8] 刘帮,秦斌,彭小玉. 污水出水水质的SVR建模[J]. 新型工业化,2015,01:45-48. B Liu. Modeling of Wastewater Effluent water Quality on Support Vector Regression Machine[J]. The Journal of New Industrialization,2015,01:45-48.
[9] 王剑,周洪亮,何朕. 基于模型预测控制的混合动力汽车转矩协调控制方法研究[J]. 新型工业化,2014,03:29-37. J Wang. Reserch on MPC Based Toeque Coordination Control Method for Hybrid Electric Vehicle[J]. The Journal of New Industrialization,2015,01:45-48.
[10] J B Zhao.Adaptive Track Predicting Control for Target Tracking Control Systems[J]. Journal of Beijing Institute of Technology(English Edition),2006,01:62-65.
DOI:10.3969/j.issn.2095-6649.2015.08.006
*基金项目:湖南省研究生创新基金(CX2015B564)。
作者简介:宋翼颉(1991-),男,湖南工业大学硕士研究生,主要研究方向:复杂过程建模,控制与优化;王欣(1971-),女,教授,博士,主要研究方向:复杂过程建模,机器学习。
Prediction Control of Wastewater Treatment Process Based on LSSVM
SONG Yi-jie, WANG Xin
(College of electrical engineering, Hunan University of Technology, Zhuzhou, 412007)
ABSTRACT:In view of the characteristics of difficult control of nitrate nitrogen in wastewater treatment process, a model predictive control algorithm based on LSSVM is proposed, which can improve the accuracy and efficiency of control. Simulation results show that under the same disturbance, nitrate concentrationscan be stable between 1 ± 0.1by predictive control algorithmbased on LSSVM. But nitrate concentrations can be stable between 0.1 to 1.2 by PI controller. So the performance of predictive control algorithmbased on LSSVM is better than PI.
KEYWORDS:Wastewater treatment process; Least squares support vector machine(LSSVM); Model predictive control
