多传感器跟踪系统的混合架构设计*
2015-07-24郑昌艳
梅 卫,郑昌艳
(军械工程学院,河北 石家庄 050003)
多传感器跟踪系统的混合架构设计*
梅 卫,郑昌艳
(军械工程学院,河北 石家庄 050003)
多传感器跟踪系统通常采用集中式或分布式结构。据报告分析,在混合架构设计下的多传感器追踪系统,融合中心将可以直接访问传感器数据。混合式架构的多传感器跟踪系统,首先进行航迹关联(T2TA),然后利用中央跟踪器实现测量值融合,这样航迹关联和测量值融合可同时获得最佳性能。此外,在滑动窗口下实行的T2TA结合了航迹估计和分布式压缩测量的功能,可形成混合检验的数据。仿真实验证明,所提出的基于混合检验的T2TA是混和架构的多传感器跟踪系统的理想解决方案。
目标跟踪;航迹关联;航迹融合;假设检验;混合架构
0 引言
采用多传感器进行目标跟踪比采用单一传感器性能更好,因为它具有更好的可视性、更多的补充信息等[1-3]。跟踪数据的融合通常有两种方法:一种是集中式观测融合(CMF),由中央跟踪器对航迹关联(M2TA)和跟踪更新进行测量值计算; 另一种是航迹融合 (T2TF),即将局部跟踪系统中的传感器航迹在执行航迹关联后,融合形成系统航迹。集中式观测融合(CMF)方法被认为拥有最理想的跟踪效果,但由于通信协议和通信组织的限制[1,3,4],航迹融合(T2TF)在众多实际系统中被经常采用。
本文讨论融合中心可对传感器数据进行直接访问的多传感器跟踪系统。为了同时提高关联与融合的精度,本文更偏向于采用混合融合架构,而不是采用 CMF或者 T2TF。所提出的混合融合设计,首先执行 T2TA操作,然后使用中央跟踪器实现测量值融合。而且在滑动窗口下实行T2TA时,可以利用多重扫描数据提高关联的精度。由于多重扫描跟踪数据具有时间关联性[5],传统的滑动窗口T2TA会导致跟踪性能下降,文献[3]给出了此问题的一个精确的解决方案。本文解决方案是在白噪声的假设下,利用与时间无关的航迹估计和分布式压缩的混合检验统计数据。
1 多传感器跟踪的混合构架
多传感器跟踪装置的设计目的是:(1)在带宽和无线信道的限制下,降低传感器节点与融合中心之间的数据通信量[6];(2)提高关联与融合的精度。融合中心拥有足够强大的计算能力,所以并不需要过多关注。本文设计的混合结构的多传感器跟踪装置如图1所示。不同传感器的测量值会周期性地发送给融合中心进行处理。需要注意的是,每个传感器的测量值可能来自于几个已经被局部M2TA编入索引的目标。这些被索引的测量值作为局部航迹已经有了相同的序列编号,并被命名为局部航迹测量序列。
中央站进行数据融合包括三个步骤:预跟踪、航迹关联和CMF。在预跟踪环节中,每个传感器测量的局部航迹测量序列将重新滤波产生局部航迹。在航迹关联环节,不同跟踪器的待定航迹对将被关联起来,以判定它们是否属于单一的假定目标。一旦一对航迹被关联,测量序列产生的相应航迹也会被同时关联。从航迹关联模块到中心跟踪装置模块的关联过程如图1所示,通过使用中央跟踪器融合来自于不同跟踪器关联的测量序列,从而形成系统航迹。此混合处理架构具有三大优势,将在下文详细列出。
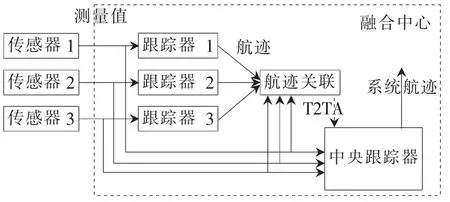
图1 混合构架多传感器跟踪系统
1.1 传输传感器测量值通信流量小
多传感器跟踪系统的每个跟踪器在球面坐标系下测量值为(r,α,ε)。 规定用测量误差的标准偏差(σr,σα,σε)来表示跟踪器的精度,标准偏差通常是常数并可在融合中心提前设置。这就意味着在每个通信周期中,发送传感器测量值的流量只包含三个元素。如果是传感器航迹,还包括航迹估计和它的协方差。在三维坐标跟踪的情况下,航迹估计至少包括位置估计和速率估计,是6种元素的向量。相应的协方差是 36个元素的 6维矩阵。因此,在每个通信周期内的总流量将会上升至 42个元素。尽管传感器航迹代替传感器测量值输入至融合中心可在一个较低的速率下进行,但是通常情况下这样并不能节省通信流量。这就是在设计的多传感器跟踪系统中选择将传送传感器测量值输入到融合中心的原因。
1.2 卓越的关联性能
卓越的关联性能通过两种方式来实现:(1) 采用T2TA来替代M2TA,因为航迹估计通常比测量值更为精准;(2)采用滑动窗口测试方法,其相比于只使用两条待定传感器航迹现有数据的单次测试拥有更出色的关联性能。传统的滑动窗口检验T2TA运用了图2所示的多重扫描航迹估计,例如:m1=5用于计算检验统计量的扫描数据。假设航迹估计xˆi和xˆj为 n1维向量,估测误差服从高斯分布,则下列统计检验量 Ck应遵循 n=m1n1,卡方检验自由度为 χn2[4-5]。

其中,Tij=Pi+Pj-Pij-Pji,Pi和 Pj为和的估计误差协方差,Pij=[Pji]T为它们的互协方差。
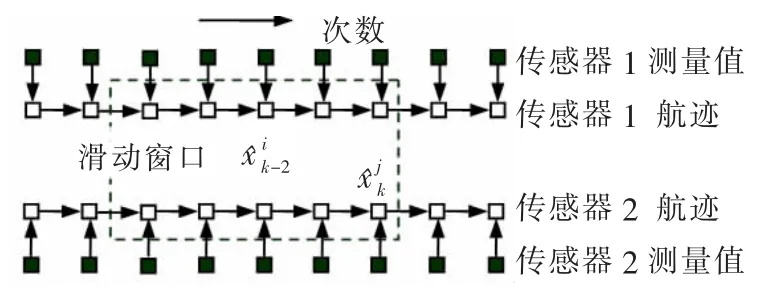
图2 滑动窗口测检验

其中 Rki和 Rkj为压缩测量值 zi和 zj的协方差。注意压缩测量值 z位于笛卡尔坐标,可由球面压缩测量值(r,α,ε)通过各种方式转化而来[7-8]。 如上所述,压缩测量值是一系列测量值的统计平均值。例如:已知m2=4时,球面扫描测量值为(r1,α1,ε1),(r2,α2,ε2),(r3,α3,ε3)和(r4,α4,ε4),它们的标准偏差为(σr′,σα′,σε′),则压缩测量值(r,α,ε)即为:

相应的标准偏差(σr,σα,σε)为:

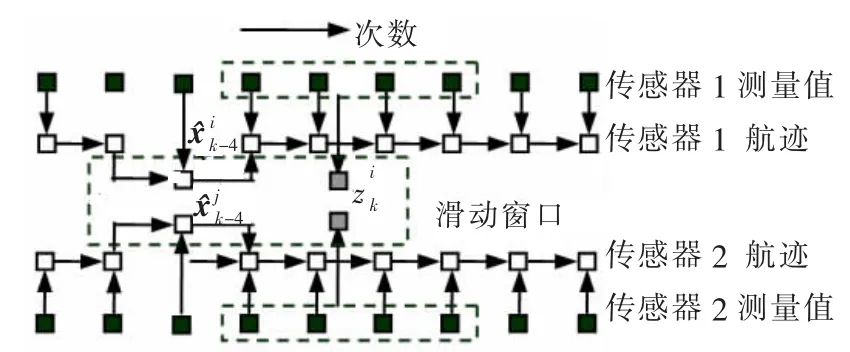
图3 混合检验
1.3 最佳的融合性能
CMF方法首次被用于将来自不同传感器的关联测量值作为输入的中央跟踪器(如图1所示,融合中心内航迹关联区块的输出信息也作为了中央跟踪器的输入),并利用这种融合观测来估计状态向量。CMF方法相比于航迹状态融合方法,如航迹融合方法(T2TF)[3,9],拥有更卓越的融合性能。 T2TF算法的 一种特殊 形式——信息矩阵融合(IMF)[10-11], 在融合中心全速运行时可与CMF达到同等的效果。然而,一旦如文献[12]中所描述的,当融合中心低速运行时,它便会出现不一致性甚至是严重的偏差。在此,混合架构设计的多传感器跟踪系统的中央跟踪器采用CMF方法。需要强调的是虽然CMF被用于跟踪中心,但航迹估计通常比测量值更为准确,所以在关联方面还是应采用T2TA来替代M2TA。
2 仿真实验
仿真实验针对提出的混合检验方法 T2TA进行重点研究,采用了以下的仿真场景将其与传统的T2TA方法进行对比。
场景 1:两个雷达同时跟踪同一个目标:目标 1。场景 1被设计用来评估正确关联概率(Probability of Correct Association,PCA)。文献[5,13]对 PCA的定义如下:正确地将两条来自单一目标的传感器航迹判定为来自同一目标的概率。
场景2:两个雷达分别跟踪两个不同的目标:目标 1和目标 2,目标相距Δy≈50m。场景 2被设计用来评估错误关联率(Probability of False Association,PFA)。同样地,文献[5,12]对 PFA的定义:错误地将来自两个不同目标的传感器航迹认定为来自同一目标的概率。
根据下列方程式,建立如图4所示的笛卡尔坐标。
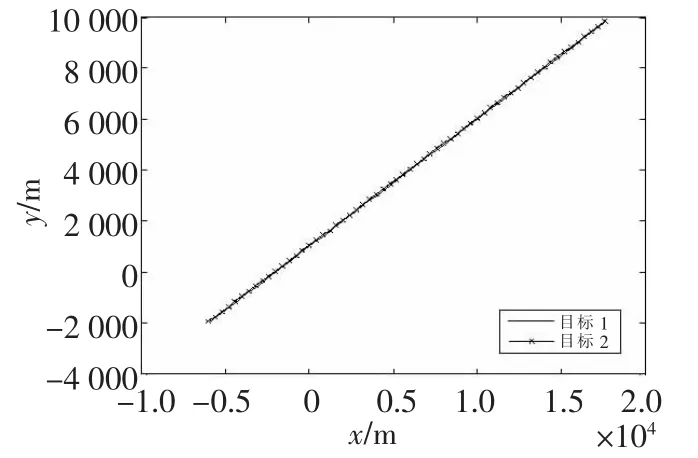
图4 两个平行目标的轨迹
目标 1:
x1(k)=18 000-200k+vx(k)
y1(k)=10 000-100k+vy(k)
z1(k)=3 000+vz(k)
目标 2:
x2(k)=18 000-200k+vx(k)
y2(k)=10 000-100k+Δy+vy(k)
z2(k)=3 000+vz(k)
整个过程中,噪声 vx(k),vy(k),vz(k)都服从 N(0,22)分布。而且在所有的场景中,雷达站均设置在笛卡尔坐标系的原点,并以 T=2 s的采样间隔利用 60组球面扫描测量值跟踪目标。 雷达测量误差的标准差为:σα= σε=10 mrad,σr=15m。
图5~图7所示的仿真结果都是通过 500次的相关检验得到,滑动窗口检验也采用了 5项传感器扫描的数据。关联测试的显著水平被设定为 95%,这意味着正确关联率应达到 95%。由图5可知,单次检验和混合检验在PCA方面具有不相上下的竞争力,其PCA值都非常接近95%。但是,滑动窗口检验由于航迹与时间相关,其PCA值只有75%左右。图6中,混合检验的PFA明显要比单次测试更佳。滑动窗口测试虽然拥有最低的PFA,但考虑到其PCA为最低,因此其整体效果并未达到理想要求。将滑动窗口检验的判决门槛提高以令其PCA提升至95%,但与此同时它的PFA会如图7所示变得比混合测试更糟糕。综上所述,从整体上看,本文所提出的混合检验设计具备最令人满意的关联性能。
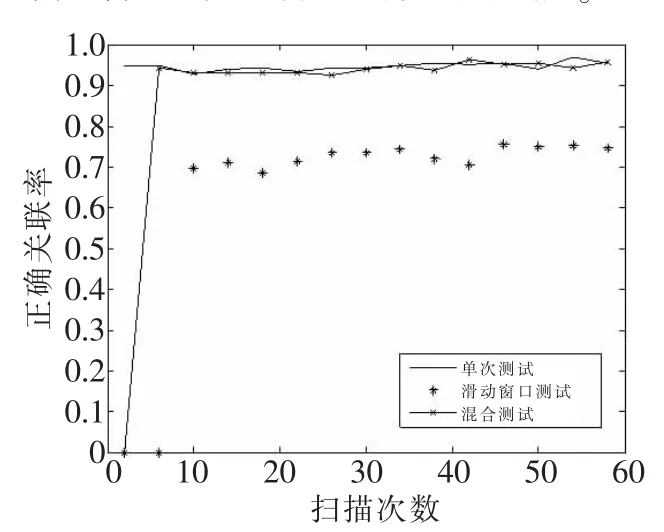
图5 正确关联率

图6 错误关联率
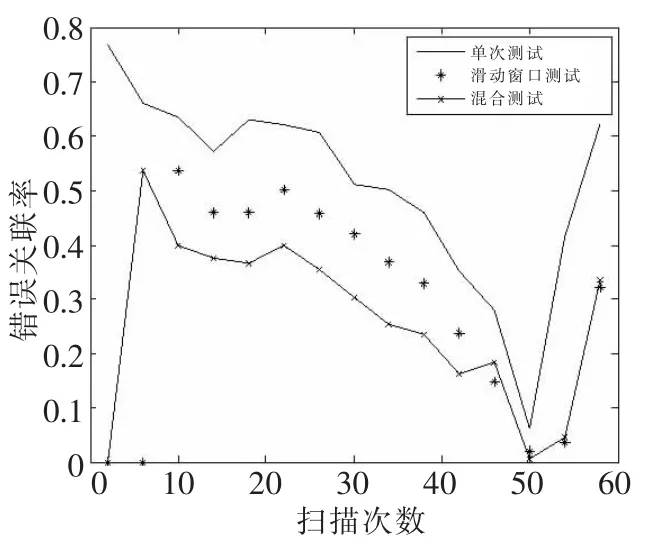
图7 将滑动窗口测试PCA提升至95%后的错误关联率
3 结论
当融合中心可直接访问传感器数据时,本文提出的基于混合检验的T2TA混合架构多传感器跟踪系统,是获得较低的流量需求以及优越的关联和融合性能的一种理想的解决方案。
[1]CHONG C Y,CHANG K C,MORI S,et al.Architectures and algorithms for track association and fusion[J].IEEEMagazine on Aerospace and Electronic Systems, 2000,15(1):5-13.
[2]SCALA B,FARINA A.Choosing a track association method[J]. Information Fusion,2002,3(2):119-133.
[3]TIAN X,BAR-SHALOM Y.Track-to-track fusion configurations and association in a sliding window[J].Journal of Advances in Information Fusion,2009,4(2):146-165.
[4]HE Y,ZHANG J W.New track correlation algorithms in a multisensor data fusion system[J].IEEE Tran.on Aerospace and Electronic Systems,2006,42(4):1359-1371.
[5]MEI W,SHAN G L.Performance of a multiscan track-totrack association technique[J].Signal Processing,2005,85(1):15-22.
[6]秦杰,杨洋,熊娟,等.FBAR传感器信号处理电路的设计[J].微型机与应用,2013,32(6):22-24.
[7]LERRO D,BAR-SHALOM Y.Tracking with debiased consistent converted measurements versus EKF[J].IEEE Trans. on Aerospace and Electronic Systems,1993,29(3):1015-1022.
[8]MEI W,BAR-SHALOM Y.Unbiased Kalman filter using converted measurements:revisit[C].Proc.of SPIE Conference on Signal and Data Processing of Small Targets,USA,San Diego,2009:74450u:1-74450u:9.
[9]ROECKER J A,MCGILLEM C D.Comparison of twosenosr tracking methods based on state vector fusion and measurement fusion[J].IEEE Trans.on Aerospace and Electronic Systems,1988 24(4):447-449.
[10]CHONG C Y,MORI S,CHANG K C.Distributed multitarget multisensor tracking[M].MA:Artech House,1990.
[11]CHANG K C,SAHA R K,BAR-SHALOM Y.On optimal track-to-track fusion[J].IEEE Trans.on Aerospace and Electronic Systems,1997,33(4):1271-1276.
[12]CHANG K C,TIAN Z,SAHA R.Performance evaluation of track fusion with information matrix filter[J].IEEE Trans. on Aerospace and Electronic Systems,2002,38(2):455-466.
[13]WANG G H,MAO S Y,HE Y.Analytical performance evaluation of association of active and passive tracks for airborne sensors[J].Signal Processing,2003,83(5):973-981.
Hybrid architecture design for multisensor tracking system
Mei Wei,Zheng Changyan
(Ordnance Engineering College of PLA,Shijiazhuang 050003,China)
Multisensor tracking systems usually use either centralized structure or distributed architecture.According to the report analysis,the multisensor tracking system with designed hybrid architecture,where the fusion center can direct access to the sensor data.It performs track-to-track association (T2TA)first and then uses a central tracker to implement measurement fusion so that association and fusion can achieve best performance simultaneously.Especially, T2TA is handled in a sliding window, which combines track estimate and the subsequent compressed measurement to form a hybrid test statistics.Simulation test shows that the proposed T2TA based on hybrid test is a desired solution.
target tracking;track-to-track association;track fusion;hypothesis test;hybrid architecture
TP399
A
1674-7720(2015)23-0076-04
梅卫,郑昌艳.多传感器跟踪系统的混合架构设计[J].微型机与应用,2015,34(23):76-79.
2015-09-12)
梅卫(1971-),男,博士,副教授,主要研究方向:目标跟踪,不确定性理论,机器学习。
国家自然科学基金(61141009)
郑昌艳(1990-),通信作者,女,硕士研究生,主要研究方向:目标跟踪,机器学习。E-mail:echoaimaomao@163.com。
