I&I镇定控制的SVC自适应控制方法
2015-07-24景军锋李鹏飞
张 蕾,景军锋,李鹏飞
(西安工程大学 电子信息学院,陕西 西安710048)
0 引 言
SVC是一种最常用的柔性交流输电系统(FACTS)装置,它通过连续调节在电网中吸收或发出的无功功率来维持接入点电压恒定,延长输电距离并提高电力系统有效传输容量,从而改善远距离输电系统的稳定性[1-3].文献[4]为SVC设计了基于DFL方法的非线性控制器,相比于基于线性最优控制方法的常规控制方式,非线性SVC控制器能显著改善电力系统的运行稳定性;文献[5]基于非线性最优控制方法为SVC设计控制器,相比于常规PID控制策略和固定电容器补偿方式,所设计的非线性SVC控制器可以显著改善电力系统的运行稳定性;文献[6]将变结构控制应用在SVC控制器的设计中,得到了不依赖于系统平衡点和结构的SVC非线性控制器,并通过对所建立的系统模型进行仿真,验证了算法的有效性;作为一种有效的非线性控制方法,Adaptive Backstepping算法近年来也逐渐在SVC控制中得到应用,文献[7]基于无源性系统理论和Adaptive Backstepping算法,解决了SVC无穷大电力系统的扰动镇定问题以及不确定参数的自适应估计问题,但是该方法设计多阶非线性系统控制律时需要构造备选Lyapunov函数(CLF),从而造成系统计算膨胀和过参数化的问题[8-9].
I&I镇定控制方法是由Alessandro Astolfi[10-11]等提出的一种新的非线性控制方法,这种方法在应用时不需要递推构造CLF,因此避免了 “计算膨胀”问题.该方法源于系统“浸入”的思想,通过将被控系统渐近“浸入”到一个全局渐近稳定的目标系统来保证闭环系统的稳定性,能将非线性系统控制律的设计问题简化为其他易于解决的子问题,例如转化为求取两个坐标系之间的映射的问题[12].
文中针对装设SVC的单机无穷大(SMIB)输电系统的稳定性问题,给出了一种基于I&I镇定控制和直接参数自适应辨识的非线性控制方法.在设计中选取二阶的目标系统,并将被控系统动态“浸入”其中,采用直接参数自适应辨识方法,为不确定阻尼系数设计了参数自适应律.所提方法不需对系统进行线性化,也不需要构造Lyapunov函数来设计控制律,避免了Adaptive Backstepping算法由于递推构造CLF导致的过参数化问题.仿真结果表明,所提算法在系统状态变量暂态响应方面得到改善.
1 系统模型和控制目标
针对输电线路中点装设SVC的SMIB输电系统,建模时发电机转子运动方程采用经典二阶模型,SVC建模为一阶惯性环节,则系统的动态方程[13-16]可表示为

式中:δ为发电机转子角,rad;ω为发电机转子角速度,rad/s;ω0为同步角速度,rad/s,ω0=2πf0;Pm为原动机输出机械功率,即发电机输入机械功率,kW;Pe为发电机电磁功率,kW;D为单位阻尼系数;H为转子转动惯量,s;Tc为SVC调节器时间常数,s;BSVC为SVC的电纳,Ω;BSVC0为电纳BL的初始值;Kc为SVC调节器的放大系数;uB为SVC调节器的控制变量.为了使所设计方法的描述更加简洁,再做如下的变量替换:
方法:洗净两个番茄,切片剁碎,热锅,放入少许植物油,把番茄切碎放入煸炒,炒至2~3分钟,香味微出,倒入火锅炉中,加足量温水,同时加入准备好的葱、姜、蒜片,慢火微炖,开锅即可开涮。


则式(1)可以表示为

假设系统初始稳态平衡点表示为x0=[δ0ω0BSVC0]T.所定义的新的状态变量x=[x1x2x3]T中,3个状态变量分别表示当前工作状态下的发电机功角、转子角速度以及SVC系统的等效电纳与它们初始稳态值之间的差值,并且满足x∈l={x1,x2,x3|0<x1<π},其中,l表示系统的工作区域.根据状态变量之间的替换,式(4)的初始稳态平衡点可表示为x0=[0 0 0]T.
将系统(23)的第二个微分方程写成如下形式:

所设计的SVC控制器是要保证式(4)的所有状态变量的暂态响应轨线一致有界,且收敛于平衡点x0上,同时对不确定参数θ设计相应的自适应估计器,实现对它的自适应辨识.
2 SVC控制律设计
下面,对闭环系统(23)中状态变量的暂态响应轨线的有界性进行证明.由状态变量的替换过程可知,状态变量x= [x1x2x3]T的工作区域为 = {δ-δ0,ω-ω0,BSVC-BSVC0|0<δ<m}.因此在系统的工作区域内,状态变量x1一致有界,也就是x1的暂态响应轨线一致有界.从式(20)可知,x3与z和m3存在关系式x3=z+m3.由式(21)可知,变量z被指定在坐标原点具有全局渐近稳定的动态特性,因此变量z的暂态响应轨线一致有界并满足;由式(16)中m3的表达式可知,π3为有界函数,因此,x3的暂态响应轨线在工作区域内一致有界.
AM2303数字温湿度传感器是含有已校准数字信号输出的温湿度复合传感器。AM2303之间的通讯采用单总线数据格式,1次通讯时间5ms左右,数据传输为40bit,高位先出。单片机发送1次开始信号后,AM2303从低功耗模式转换到高速模式,等待开始信号结束后,AM2303发送响应信号,送出40bit的数据,并触发1次信号采集。

式中,R(ξ1,ξ2)为系统的阻尼函数,H(ξ1)为系统的能量函数,是待定函数.假设ξ*= (ξ1*,0)是式(6)的全局渐近稳定平衡点.对于式(6),可定义备选Lyapunov函数(CLF)为
钢桁梁结构整体计算采用有限元空间程序MIDAS进行分析,可划分为142个梁单元以及72个节点,将空间桁架各杆件轴线形成的几何图形作为该桁架的计算图示,并假定各节点为固接,按实际支座情况加上边界条件。

阻尼函数R(ξ1,ξ2)和能量函数 H(ξ1)需满足下列条件:

对于所构造的式(7)表示的CLF,求其沿式(6)的状态轨迹,可得

在式(12)中,选择R(ξ1,ξ2)=-θ>0,显然满足式(10)表示的关于阻尼函数R(ξ1,ξ2)选取的要求.显然,再通过选取适当的能量函数H(ξ1)可以满足式(8)的要求.令,其中β>0为待定常数.那么将R(ξ1,ξ2)=-θ和代入到式(12)和式(13)可得

第二步:求取被控系统的状态变量x和目标系统状态变量ξ之间的映射m:Rp×Rn.将状态变量之间的映射关系表示为
综观国内学术界十六大以来有关中国共产党生态文明思想的文献资料可知,专家学者们根据自身的学科背景,从不同的视角对中国共产党的生态文明思想展开了广泛的探索和研究,主要如下:

式中,假设m3(ξ)是自变量ξ1的函数,其具体表达式需要通过状态变量之间的映射求得.
分别将映射关系m中x1与ξ1,x2与ξ2之间的映射关系代入式(4)中,可得

要使式(6)在平衡点ξ*=(ξ1*,0)处全局渐近稳定,需要保证式(9)的等号右边不大于零,根据这一原则,阻尼函数R(ξ1,ξ2)和能量函数 H(ξ1)需满足下列条件:


现在,控制律设计问题就简化为寻找可以满足式(14)的映射关系m3,并根据m3求取中间控制律ν(π(ξ)).根据式(14)可得

式中,η(x1,x3)=k1Pm-k2(x3+BSVC0)δsin是与x2无关的有界函数,并且由于θ=-D/H <0,式(24)对于状态变量x2是指数稳定的系统,这意味着x2一致有界.

第三步:通过中间控制律ν(m(ξ))的设计要使流形满足下面的要求,即由式(18)所表示的流形M是不变的:

其中,

第四步:通过所设计的“真实控制律”uB=ψ(x,z)要保证系统中所有状态变量的暂态响应轨线一致有界且收敛到不变集M中,即满足闭环系统的流形吸引和轨线有界性条件.为此,定义一个新的变量z=φ3(x)表示当前状态轨线与目标流形之间的距离.根据式(4),求得它的时间微分为:
党的十八大以来,敬业拼搏的天脊人,坚持精致生产的基础地位不动摇,坚持市场深耕的中心地位不动摇,坚持流动风控的关键地位不动摇,精精致致做产品,规规范范做市场,真真切切做服务,打造天脊品牌,坚定品质自信,为乡村振兴战略实施、深入推进脱贫攻坚、农民增产丰收助力加油。

从式(20)可以看出,通过SVC的真实控制律uB=ψ(x,z)的设计可以使z具有指定的动态特性,用公式表示就是通过使,使式(4)的轨线收敛到不变集M上.为了完成上述的控制目标,给z指定如式(21)所示的全局渐近稳定的动态特性,即

显然,式(21)是关于变量z的满足Lyapunov渐近稳定定理的一阶系统,z=0是系统的一个全局渐近稳定平衡点,变量z的轨线一致有界且指数收敛到零,即联立式(20)和式(21),可以求得控制律uB=ψ(x,z)为

在控制律uB=ψ(x,z)作用下构成的闭环系统为

第一步:选取低于被控系统阶数的目标系统[10].这里选取一个常用的单摆系统的二阶动态系统模型作为目标系统:
SVC控制目标是对不确定参数进行自适应辨识,并设计控制律uB,将系统轨线驱使回初始稳定平衡点x0= [0 0 0]T上,即

将式(16)代入式(15),可求取中间控制律ν(π(ξ)):
从上述证明可知,式(23)的所有状态变量一致有界且z=0是系统的全局渐近稳定平衡点,这也就是说,式(4)的状态变量的轨线将收敛到x0上.
3 参数自适应律设计
采用文献[17-18]中提出的基于自适应滑模观测器的直接参数辨识方法,为未知参数θ设计自适应估计器^θ.
根据变结构控制理论(VSC),状态变量x2的自适应观测器满足如下关系:


定义新的误差变量为

求状态误差变量x2e沿式(25)的状态轨迹为

为了保证式(28)所表示的一阶系统的稳定性和变量x2e的收敛性,需做如下假设:
如图4所示,在CB-Sync算法中使用Chirp信号作为广播消息的导频序列,其中信标节点发送的Chirp导频信号如图5(a)所示,S(t)由一串Ns个脉冲信号组成,其中第一个脉冲峰值到最后一个脉冲峰值的间距为ts.由于多径效应,在接收端,每个脉冲会出现不同的拖尾,普通接收节点上的接收机只需要检测主径上的峰值,设在接收机上检测第一个到最后一个脉冲峰值的间距是Ts.但是,在初始状态下,Ts只是不同节点未同步的时间,其相对于信标节点的时间实际是(Ts-β)/θ,因此多普勒规模因子的值应为
假设1 在式(28)中,自适应估计器的增益满足下面的条件:

在假设1成立的前提下,显然,式(28)所描述的系统是渐近稳定的,且x2e将收敛到零.这意味着,存在一个不变集,即

式(28)的状态误差变量x2e的暂态响应轨线将收敛到M1.
可以说,吕柟受学于晋人,发挥晋学,又反哺于晋学,致仕后又将晋学带回关中,成中继张载之后“关学”的领军人物,都对当时及后世的学术起到了重要作用。
通过使x2e=0求得等效控制输入ϑeq:

从物理角度来看,等效控制输入ϑeq不能直接得到,无法得到eθ的精确值.采用文献[17]中提出的平均控制向量来近似计算ϑeq,即
蓝天碧野,我的视线里有一团白云在飘。渐渐远去的白云,忽然间模糊了我的眼睛。我仿佛回到了那个遥远的夏夜,就见一轮弯月落在河里,河面上浮现了一层朦胧的亮色。
使用SPSS 17.0统计学软件处理数据,计量资料用(±s)表示,采用 t检验,计数资料用[n(%)]表示,采用χ2检验,P<0.05为差异有统计学意义。
式中,rk是指爆轰产物压力为特征压力pk时相应的爆轰产物半径。考虑爆轰产物膨胀过程中多方指数k将发生变化,这里,作简化处理,取两个值,分别为k1和k2。特征压力pk定义为多方指数发生突变时的压力[10]。假定爆轰产物初始压力p0为爆轰产物压力的一半,联立式(13)和式(14),通过半径r将爆轰产物压力p表示为

其中,τ是一个待定正常数,p也是一个正常数,表示的是目标系统的阶数,从系统模型可知,p=2.
在你心目中,端午节是什么样子?在我看来,端午节如诗如画,两岸一片笙歌,水中蛟龙飞驰;端午节如梦如幻,千人竞渡,万人欢歌;端午节如风如影,浪花激荡人心,船桨划出荣耀;端午节如痴如醉,是家乡的锣鼓、乡音、浓情。
联立式(31)和式(32),求参数估计误差eθ的表达式:
从上表4中可以看出,给矿中该矿泥-0.010 mm粒级产率占到了40.43%,锡分布率为27.59%,通过旋流器三次脱泥后,其沉砂中-0.010 mm粒级产率仅为3.34%,锡分布率为3.79%,其溢流-0.010 mm粒级产率为66.03%,锡分布率为57.40%,说明通过三次脱泥后,绝大部分-0.010 mm的粒级已进入到溢流中,满足了锡石浮选的作业条件。


式中,Kθ是一个待定正常数.将式(34)进行积分即可得到参数自适应估计值且.如果θ变化率不大,则若θ变化率很大,则此时

将参数自适应律设计的主要结果用命题1进行总结:
命题1 对于装设SVC的SMIB系统(1),由式(34)表示的参数自适应律的设计可以保证参数自适应估计器的动态特性是稳定的,并收敛于θ的真值,即
式中,x′i和y′i为各点距离区域重心的相对坐标,根据tan θ可以得到点的分布格局的转角.δx和δy即为沿x轴标准差和y轴标准差.

构造系统的Lyapunov函数,由误差变量eθ的二次型构成

根据式(25),求其对时间的微分可得

在式(38)中,如果Kθ>0,σ≥0,即可保证这意味着式(37)所表示的Lyapunov函数对于所有的eθ都保持半负定特性.由Lyapunov渐近稳定定理可知,eθ将指数收敛到零,这说明将收敛到其真值θ.并且根据La Salle-Yoshizawa定理可知,闭环系统(23)中所有状态变量一致有界.
4 仿真结果
根据所设计的基于I&I镇定控制和自适应滑模观测器的SVC自适应控制系统,采用Matlab/Simulink对式(1)所示的装设SVC的SMIB系统进行了暂态响应的仿真.为了检验方法的有效性,将其在相同初始条件下的系统暂态响应与文献[19]中的基于自适应反步法的SVC控制器的作用效果进行了比较.仿真中SMIB系统中发电机和无穷大母线相关的参数设置[20]如下:H =8,w0=314,E′q=1,Vs=1,Kc=1,Tc=1.任选一初始稳态运行工作点为[δ0ω0BSVC0]T= [0 0 1.1]T.SVC控制器相关的参数设置为β=5;λ=15,Kθ=0.000 15,κ=1,τ=1,p=2,σ=1.自适应估计器的初始状态为仿真中故障设定为在无穷大母线左侧某处发生对称三相短路,100ms后故障清除,考察在故障发生及系统恢复这一过渡过程中系统状态变量的暂态响应.
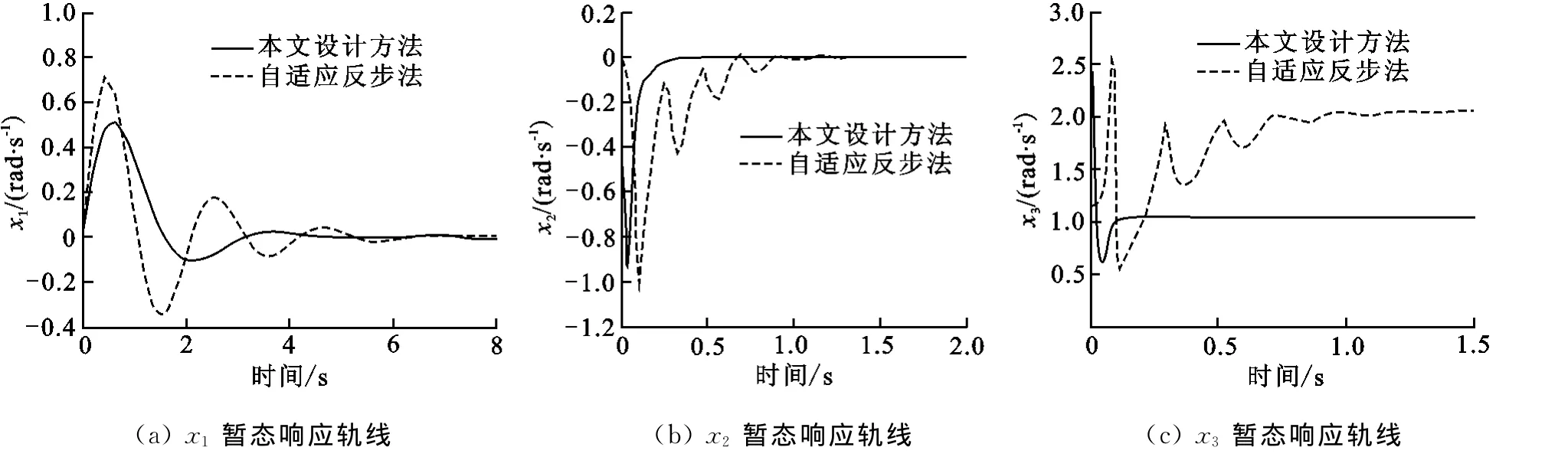
图1 状态变量x1,x2和x3的暂态响应轨线Fig.1 Transient response trajectories of states x1,x2and x3
图1(a)~(c)分别是系统状态变量x1,x2和x3在本文所设计自适应控制方法和自适应反步法的作用下的暂态响应轨线,分别对应于发电机功角、转子角速度和SVC等效导纳.从图1(a)中可看出,虽然两种控制方法均可以使系统中发电机功角回到初始稳态值,但在文中所提方法的作用下功角暂态响应的轨线收敛速度明显快于自适应反步法.另外,文中所提方法可以使状态变量暂态响应轨线在故障发生后振荡的幅值更小,从而提高了系统的暂态稳定性.同样地,从图1(b)和(c)可以看出,发电机转子角速度和SVC系统等效电纳的暂态响应速度在文中所提方法的作用下也明显快于自适应反步法,且振荡幅度更小,并很快收敛于初始稳态值.而自适应反步法则驱使轨线到达一个新的平衡状态稳定运行.另外从仿真结果也可以看出,系统状态变量x1,x2和x3的暂态响应轨线在整个运行过程中一致有界,这也与理论结果一致.
图2是所设计的自适应律对不确定参数θ的估计值响应曲线.从图2可以看出,所设计的自适应律响应时间短,并最终近似地收敛于其真值,也就是说参数估计误差近似收敛到零.这意味着所设计的参数自适应律(34)可以有效地辨识不确定参数θ.
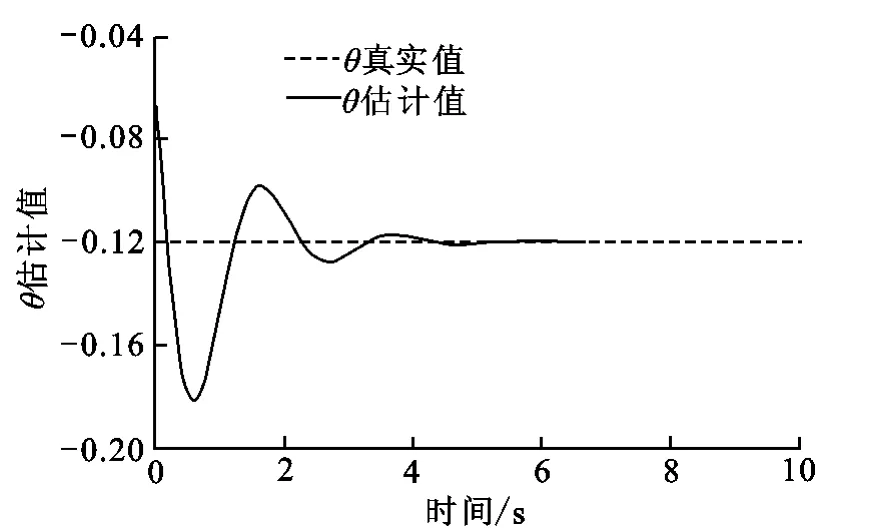
图2 参数估计值^θ响应Fig.2 Response of parameter estimator
5 结束语
基于I&I镇定控制和直接参数自适应辨识方法,为SMIB系统设计了一种非线性SVC自适应控制系统,以提高系统的暂态稳定性.所设计的控制方法不需要递推构造CLF,从而避免了“计算膨胀”这一问题,并克服了由于递推构造CLF而存在的状态变量和参数估计误差之间的耦合引起的系统暂态响应性能问题.该方法可推广到其他FACTS装置的控制器设计中,并可以结合先进参数估计方法进一步提高系统的自适应辨识能力.
[1]卢强,梅生伟,孙元章.电力系统非线性控制[M].北京:清华大学出版社,2008:404-428.LU Qiang,MEI Shengwei,SUN Yuanzhang.Power system nonlinear control[M].Beijing:Tsinghua University Press,2008:404-428.
[2]LEUNG JSK,HILL DJ,NI Y X.Global power system control using generator excitation,PSS,FACTS devices and capacitor switching[J].International Journal of Electrical Power & Energy Systems,2005,27(5/6):448-464.
[3]付伟,刘天琪,李兴源,等.静止无功补偿器运行特性分析和控制方法综述[J].电力系统保护与控制,2014,42(22):147-154.FU Wei,LIU Tianqi,LI Xingyuan,et al.Analysis of operating characteristic and survey of control methods used in static var compensator[J].Power System Protection and Control,2014,42(22):147-154.
[4]MA Youjie,CHEN Shousun,ZHANG Baolin.A study on nonlinear SVC control for improving power system stability[C]//Computer,Communications,Control & Power Engineering.Beijing:IEEE,1993(5):166-169.
[5]何振宇,李华强.发电机励磁及SVC非线性最优协调控制[J].四川电力技术,2012,35(2):85-90.HE Zhenyu,LI Huaqiang.Nonlinear optimal coordinated control of generator excitation and SVC[J].Sichuan Electric Power Technology,2012,35(2):85-90.
[6]王琦,吴启涛,纪延超.基于脉宽调制静止无功补偿器的模糊变结构控制方式研究[J].电网技术,2004,28(8):46-50.WANG Qi,WU Qitao,JI Yanchao.Study on fuzzy sliding mode controller for PWM based static var compasaiors[J].Power System Technology,2004,28(8):46-50.
[7]陈娇英,李啸骢,李文涛,等.基于自适应Backstepping的SVC鲁棒L2性能控制设计[J].电力系统保护与控制,2011,39(17):40-44.CHEN Jiaoying,LI Xiaocong,LI Wentao,et al.Robust L2performance control design for SVC based on self-adapting backstepping[J].Power System Protection and Control,2011,39(17):40-44.
[8]付俊,赵军,乔治·迪米罗夫斯基.静态无功补偿器鲁棒控制的一种新自适应逆推方法[J].中国电机工程学报,2006,26(10):7-11.FU Jun,ZHAO Jun,MIMIROVSK G M.Robust control of SVC:A new adaptive backstepping method[J].Proceedings of the CSEE,2006,26(10):7-11.
[9]ZHANG J,LIU Y.A new approach to adaptive control design without overparametrization for a class of uncertain non-linear systems[J].Science China Information Sciences,2011,54(7):1419-1429.
[10]ASTOLFI A,ORTEGA R.Imeersion and invariance:A new tool for stabilization and adaptive control of nonlinear systems[J].IEEE Trans on Automatic Control,2003,48(4):590-156.
[11]ASTOLFI A,KARAGIANNIS D,ORTEGA R.Towards applied nonlinear adaptive control[J].Annual Reviews in Control,2008,32(2):136-148.
[12]DIB W,ORTEGA R,ASTOLFI A,et al.Improving transient stability of multi-machine power systems:Synchronization via immersion of a pendular system[C]//American Control Conference(ACC),San Francisco:IEEE,2011:1408-1413.
[13]曾云,沈祖诒,曹林宁.发电机单机无穷大系统动力学模型的理论研究[J].中国电机工程学报,2008,28(17):138-143.ZENGYun,SHEN Zuyi,CAO Linning.Theoretical study on dynamical model of single-machine-infinite-bus system[J].Proceedings of the CSEE,2008,28(17):138-143.
[14]张靖,程时杰,文劲宇,等.通过选择SVC安装地点提高静态电压稳定性的新方法[J].中国电机工程学报,2007,27(34):7-11.ZHANG Jing,CHENG Shijie,WEN Jinyu,et al.A novel steady-state voltage stability enhancement method based on SVC allocation[J].Proceedings of the CSEE,2007,27(34):7-11.
[15]马幼捷,周雪松.静止无功补偿器非线性控制对系统功角稳定的影响[J].中国电机工程学报,2003,23(12):84-88.MA Youjie,ZHOU Xuesong.Study on nonlinear SVC control for improving power system stability[J].Proceedings of the CSEE,2003,23(12):84-88.
[16]刘艳红,楚冰,汤洪海.基于结构保留模型的静止无功补偿器鲁棒非线性控制[J].电力自动化设备,2012,32(4):49-53.LIU Yanhong,CHU Bing,TANG Honghai.Robust nonlinear control of static var ompensator based on structure preserving model[J].Electric Power Automation Equipment,2012,32(4):49-53.
[17]KENNE G,AHMED-ALI T,LAMNABHI-LAGARRIGUE F,et al.Nonlinear systems time-varying parameter estimation:Application to induction motors[J].Electric Power Systems Research,2008,78(11):1881-1888.
[18]AHMED-ALI T,FLORET F,LAMNABHI-LAGARRIGUE F.Robust identification and control with time-varying parameter perturbations[J].Mathematical & Computer Modelling of Dynamical Systems,2004,3(3):201-215.
[19]SUN L Y,TONG S C,LIU Y.Adaptive backstepping sliding mode H-infinity control of static var compensator[J].IEEE Transactions on Control Systems Technology,2011,19(5):1178-1185.
[20]DIB W,KENNE G,LAMNABHI-LAGARRIGUE F.An application of Immersion and Invariance to transient stability and voltage regulation of power systems with unknown mechanical power[C]//Decision and Control,Shanghai:IEEE,2009:7837-7842.
