新型自动猫道提升系统动力学分析
2015-07-22李艳娇高建强谭志松吉林大学机械科学与工程学院长春130025
李艳娇,于 萍,高建强,谭志松(吉林大学 机械科学与工程学院,长春130025)
专题研究
新型自动猫道提升系统动力学分析
李艳娇,于 萍,高建强,谭志松
(吉林大学机械科学与工程学院,长春130025)
新型自动猫道是实施深部大陆科学钻探工程的关键设备。提升系统是该猫道的动力装置,而作用在提升系统上的牵引力是一个很重要的参数。分析了猫道提升系统的结构与运动特性,建立了猫道机构的动力学理论模型,求解得到牵引力变化规律。利用A dams软件建立猫道机构动力学仿真模型,获得仿真曲线。理论分析与仿真分析结果基本一致,验证了理论牵引力数值的准确性。理论分析可作为提升系统各主要部件规格型号选取的依据,并为后续样机调试提供数据支撑。
自动猫道;提升系统;动力学分析
随着海洋石油钻井技术的进步,促进了钻井装备技术的发展,自动化石油钻机是海洋石油钻井技术的发展方向之一[1]。自动化猫道被广泛应用于海洋石油钻机,提高了钻机的作业效率和安全性。目前,在深部科学钻探领域自动化猫道正在被广泛的应用,可使钻台操作自动化和机械化,减轻操作人员的劳动强度,并提高钻机的安全性能。
根据深部大陆科学钻探项目要求以及自动化猫道的国内外现状[2]设计了如图1所示的新型自动化猫道,采用全液压驱动。其中,提升系统是猫道的动力装置,提升牵引举升滑道沿坡道运移。提升系统的牵引力是一个重要参数,合理的牵引力可作为提升系统各主要部件型号选取的有效依据。通过对提升系统进行动力学分析,对比仿真结果与理论数据,达到对牵引力分析验证的目的。
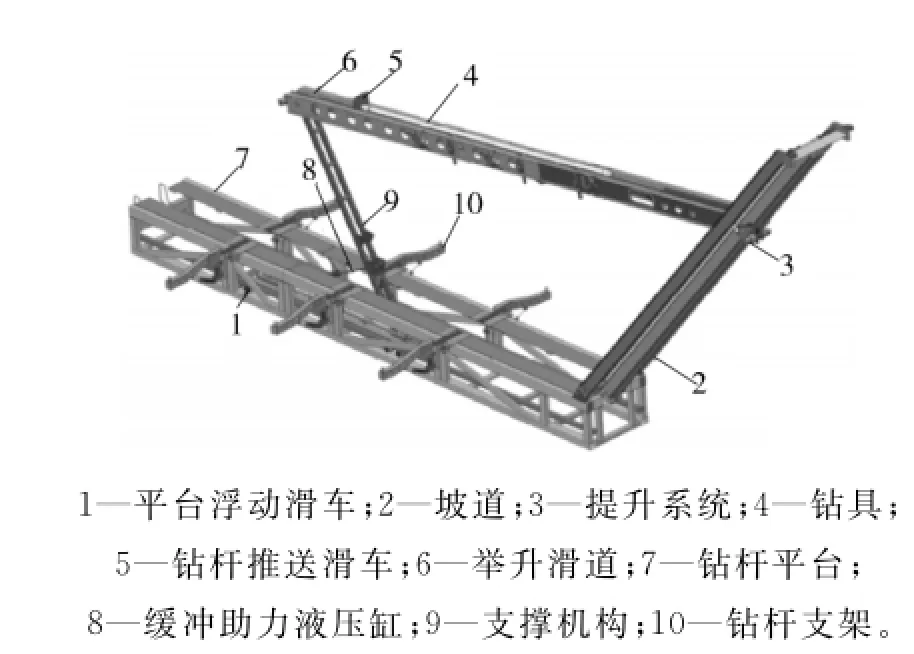
图1 新型自动猫道结构示意
1 提升系统结构组成
根据深部大陆科学钻探项目要求,结合提升系统具体功能与实际工作环境,设计的一种链传动提升系统如图2所示。

图2 提升系统结构示意
提升系统主体安装在猫道坡道两侧的钢轨上,主要包括提升滑车、翻转机构、链条张紧装置。提升滑车主要作用是承受载荷,同时也是翻转机构、驱动装置的安装载体;驱动装置和链条传动为提升滑车提供驱动牵引力;翻转机构先将举升滑道抬升一定角度便于提升,后作为固定连杆;链条张紧装置用于调节链条的预紧力与垂度,确保链条与链轮准确啮合,减小链传动过程中产生的动载荷冲击。提升系统的稳定性影响着猫道整体运行的工作效率与安全性。为了确保猫道可靠平稳的运行,对提升系统进行动力学分析是非常重要的。
2 提升系统动力学分析
2.1 猫道机构简化
根据猫道各主要部件的结构及运动状态,将其简化为如图3所示平面连杆机构,其中支撑机构、举升滑道、平台浮动滑车、提升滑车分别简化为连杆AB、连杆BC、滑块AH、滑块D,钻杆平台、坡道、缓冲助力液压缸分别简化为固定的水平滑道、具有一定角度的固定滑道、长度可变的连杆EH,翻转机构简化为连接杆件CQ,一端固定在提升滑车上,另外一端与举升滑道前端铰接。经计算此机构具有2个自由度[3](2个输入控制变量),分别是提升滑车沿坡道的直线运动和缓冲助力液压缸的伸缩运动。

图3 机构运动示意
在提升滑车牵引提升举升滑道向上运行过程中,翻转机构实际工作状态是充当固定连杆,起着传递动力的作用。根据刚体平移定义,滑块D上的点Q与连杆CQ上点C的运动轨迹、速度、加速度分别相同[4-5]。因此,为降低机构的复杂程度,便于分析,对机构做进一步简化,如图4所示。

图4 简化的机构运动示意
2.2 猫道机构受力分析
由于提升系统是在翻转机构完成对举升滑道一定角度的翻转后才真正向举升滑道提供提升拉力。因此,考虑提升滑车沿坡道开始爬行,到达坡道预定位置而停止运行这段时间相关部件之间的运动关系和受力分析。用解析法建立图4的数学模型,根据实际工作原理与运动关系可知,连杆E H的长度变化可由连杆A B的角位移的变化进行等效,得到如图5所示的机构运动分析示意图,相关符号说明如表1。

图5 机构运动分析示意

表1 图5相关符号说明
通过建立机构运动学方程式求得点A(xA,yA),点B(xB,yB),点C(xC,yC),连杆A B质心(x1,y1)、连杆B C质心(x2,y2)的位移坐标表达式,再分别对位移表达式求一阶、二阶导数后获得速度和加速度表达式。在猫道机构运动学分析的基础上对图4进行动力学分析,采用动力学方程序列求解法求解各构件的受力情况[5-6]。图6为机构受力分析图。其中F为力,Fx,Fy分别为x,y方向分力,m为质量,m为转矩,W为重力,x,y分别为x,y方向的加速度。

图6 机构受力分析
1) 对滑块AH的受力分析。

2) 将EH简化为二力杆,对EH杆受力分析。

3) 对连杆AB受力分析。式中:J1A表示以A点为矩心杆件AB的转动惯量。

4) 对杆件BC受力分析。



分别求解推导出:FCx与FCy的表达式:


作用在提升滑车的有效牵引力F的表达式:

2.3 提升系统牵引力数值求解
由项目实际设计要求确定的2个输入控制变量提升滑车和缓冲助力液压缸的运行方案为:启动时间5 s,匀速运行时间70 s,制动时间5 s。为了简化运算的同时保障一定的计算精度,将猫道机构的运行过程分为16个区段,每个区段时间为5 s。匀速运行过程中每个区段各个构件上点的轨迹使用关于变量t的6次多项式进行有效替代;启动与制动过程使用三次多项式逼近Heaviside阶跃函数来表达,目的是使提升滑车的加速度从零过渡到一个数值,再逐步过渡回零,尽量实现提升滑车平稳启动与制动。利用m atlab软件高效的数值计算功能对推导所得牵引力F进行快速求解[8-9],简化运算得到提升滑车运行过程中的近似有效牵引力表达式

牵引变化规律如图7所示。提升滑车启动过程中,牵引拉力是按照提升滑车预设的速度形式产生的加速度变化规律,先缓慢增加到某个数值后缓慢下降到另一个数值,牵引力大小变化连续,无尖点突变现象,牵引力数值上的变化量不超过0.3k N,其波动幅值较小;匀速运行过程中,牵引力沿一条曲线缓慢减小,变化非常平缓,将此阶段的牵引力变化近似为线性递减;制动过程中,牵引力变化规律与启动过程相反,先缓慢减小再缓慢增加到某个数值。
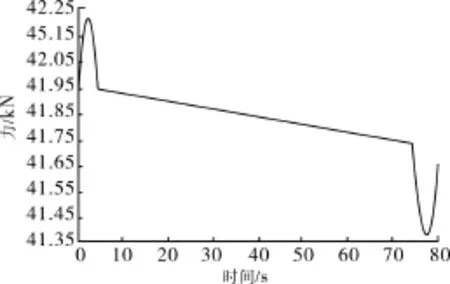
图7 牵引力变化规律
提升滑车运行时,举升滑道作用在连接点C处的作用力的变化是一个重要参数,它的数值大小和变化幅度将决定翻转液压缸选型,影响举升滑道动作的平稳性。因此在求解提升滑车的牵引力变化规律的同时,需要分别求解出点C处x与y轴方向作用力FCx与FCy随时间的变化规律,如图8~9所示。
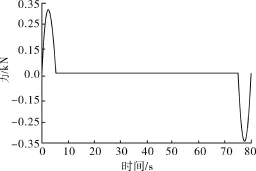
图8 点C处的x轴方向作用力
点C处y轴方向的作用力在提升滑车匀速运行阶段数值时非常小,如图8所示,充分说明了举升滑道在水平方向的运行较平稳,也不会对提升滑车产生水平冲击载荷。
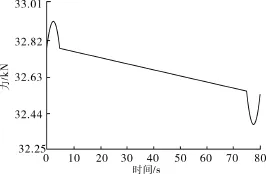
图9 点C处的y轴方向的作用力
由于承受举升滑道因重力产生的静态载荷和举升滑道在y轴方向做匀速直线运动产生的动载荷,如图9所示,在连接点C处y轴方向的作用力较大,在提升滑车匀速运行过程中,点C在y轴方向的作用力呈线性递减规律变化,递减趋势平缓且幅值变化量小。
2.4 提升系统牵引力数值验证
利用Adams对新型自动猫道的虚拟样机模型进行动力学仿真[9]。创建猫道的仿真模型如图10所示。

图10 猫道的仿真模型
对提升滑车与缓冲助力液压缸的启动与制动速度在A dams中设置为阶跃函数模式进行仿真:提升滑车速度设置形式为:
STEP(TImE,0,0,5,0.173)+STEP(TImE,5,0,75,0)+STEP(TImE,75,0,80,-0.173)
缓冲助力液压缸速度设置为:
ST EP(TIm E,0,0,5,0.02156)+ST EP(TIm E,5,0,75,0)+ST EP(TIm E,75,0,80,-0.02156)
获得相关仿真数据后将理论数据导入A dams中,进行理论数值与仿真数据对比[10-11],得到3组对比曲线如图11~13所示。

图11 牵引力对比变化曲线
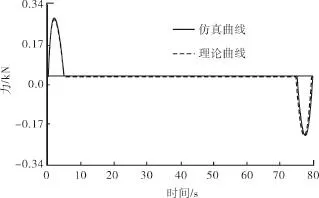
图12 点C处的x轴方向作用力对比曲线

图13 点C处的y轴方向作用力对比曲线
通过对比3组曲线可以看出,理论数据与仿真数据随时间的变化趋势基本一致,数值差别较小。可以验证理论运算数据的可靠性。但理论数据与仿真数据之间存在一定的相对误差,这一点可以从3个方面进行解释。
1) 在使用简化模型计算牵引力时,将模型中的缓冲助力液压缸简化为无质量的刚性二力杆。但在A dams中是按照实际参数赋予其相应的质量属性。
2) 理论计算使用的平面连杆机构模型,各杆件的质心都在两个铰链点的连线上,并且所有构件的质心在同一平面。实际各部件的质心位置不在连线上,而在距离连线非常近的位置,只是这个距离相对与构件两铰接点之间的距离非常小。
3) 在平面连杆机构的模型运算中,对各杆件点的轨迹使用的是多项式方程所表达的近似轨迹方程,各时间区段中数据运算存在积累误差。
3 结论
1) 作为猫道动力装置的提升系统,其驱动装置的牵引力的变化直接影响其提升滑车的运移平稳性,间接影响整机运行的平稳性与可靠性。
2) 通过把猫道模型进行合理简化为双自由度平面连杆机构,对其进行运动学分析与求解,确定了主要构件的具体运动参数以及相应变化规律。列出机构的动力学方程组,利用matlab求解出驱动提升滑车的有效牵引力的变化规律,运用A dams对结构虚拟样机模型进行动力学分析。
3) 对比理论数据与仿真数据,两者之间的变化趋势相一致,在允许的误差范围内,验证了理论分析的正确性与可靠性,可作为提升系统中液压马达的动力参数和链条传动的链轮与链条型号规格选取的依据,并为后续样机调试提供数据支撑。
[1] 崔学政,刘平全,肖文生,等.海洋钻井平台自动化猫道机设计[J].石油矿场机械,2011,40(2):20-23.
[2] 赵淑兰,李文彪,聂永晋,等.动力猫道技术国内外现状和发展趋势[J].石油矿场机械,2010,39(2):13-15.
[3] 孙桓,陈作模,葛文杰.机械原理[m].北京:高等教育出版社,2006.
[4] 林文惠.刚体运动学的几何讨论[J].力学与实践,2005,27(5):71-72.
[5] 哈尔滨工业大学理论力学教研室.理论力学[m].6版.北京:高等教育出版社,2002.
[6] 张国凤,赵匀,陈建能.基于动力学序列求解法的椭圆齿轮动力学分析[J].浙江理工大学学报,2005,22(2):157-161.
[7] 成大先.机械设计手册[K].5版.第一卷.北京:化学工业出版社,2007.
[8] 田亚平,王小荣.平面铰链五杆机构的m atlab动力学求解[J].机械研究与应用,2009(5):26-29.
[9] 张德丰,杨文茵.m A T L A B仿真技术与应用[m].北京:清华大学出版社,2012.
[10] 郑建荣.A D AmS—虚拟样机技术入门与提高[m].北京:机械工业出版社,2002.
[11] 罗贤勇.超深井石油钻机提升系统动力学建模与分析[D].武汉:华中科技大学,2008.
Dynamic Analysis of Hoisting System of the New Automatic Catwalk
LI Yanjiao,Y U Ping,G A O Jianqiang,T A N Zhisong
(College ofmechanical Science and Engineering,Jilin University,Changchun130025,China)
The new automatic catwalk is the key equipment of Deep Continental Scientific Drilling Project.H oisting system is the power plant of catwalk,and the traction force is an im portant parameter w hich roles in hoisting system.T he structure andmotion characteristics of hoisting system are analyzed,the kinetic theorymodel of the catwalkmechanism is established and solved to get the variation of traction force.A dams software is used to establish dynamic sim ulationmodel on catwalkmechanism to obtain sim ulation curves.T he result shows that:theoretical analysis and sim ulation results are basically the same to verify the accuracy of the value of theoretical traction force.T he theoretical analysis can be used as the effective basis of the components selection of hoisting system,and also provides data support for the subsequent prototype debugging.
automatic catwalk;hoisting system;dynamic analysis
T E923
A
10.3969/j.issn.1001-3842.2015.05.001
1001-3482(2015)05-0001-05
2014-11-19
国家深部探测技术与实验研究专项资助项目(SinoProbe-09-05)
李艳娇(1991-),女,吉林长春人,硕士研究生,研究方向:石油机械结构设计与优化,E-mail:13604307924@163.
