SRD长电缆驱动及其过电压抑制技术的研究
2015-07-18丁金龙
丁金龙
(北京中纺锐力机电有限公司,北京101102)
SRD长电缆驱动及其过电压抑制技术的研究
丁金龙
(北京中纺锐力机电有限公司,北京101102)
开关磁阻电机调速系统采用长电缆驱动方式运行时,会导致电机侧过电压,进而影响电缆、电机寿命。基于传输线理论,在分析脉冲波在电缆上传输及反射过程的基础上,结合开关磁阻电机调速系统的功率电路拓扑结构和控制特点,提出dv/dt抑制方案以及电机、电缆的设计使用原则,并通过仿真和样机验证。
开关磁阻;调速电机;长电缆驱动;dv/dt抑制
开关磁阻电机调速系统(switched reluctance drive,SRD)是20世纪80年代逐渐发展起来的一种新型的调速系统[1],通过最近20 a的技术提升和应用,国内已有各种类型的批量产品在各行各业发挥着重要作用,并且仍然不断地在向新的应用领域拓展。
开关磁阻电机调速系统在矿用刮板运输机应用中,由于设备巷距离综采工作面很远,导致开关磁阻控制器距离开关磁阻电机分开远距离布置,这时需要采用长电缆驱动方式运行,长电缆驱动会导致电机侧过电压,过高的dv/dt会影响电缆、电机绕组寿命,电缆、电机表面漏电流增大[2],若接地不良还将产生安全事故隐患。
本文基于传输线理论,在分析脉冲波在电缆上传输及反射过程的基础上,结合开关磁阻电机调速系统的功率电路拓扑结构,提出dv/dt抑制方案和电机、电缆的设计使用原则,并通过仿真和样机验证。
1 开关磁阻电机调速系统概述
目前,国内工业领域大量应用的均为三相结构开关磁阻电机系统,其功率电路拓扑结构及其电机的一相绕组控制基本原理如图1所示。
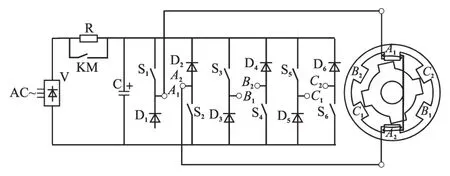
图1 开关磁阻电机调速系统原理图Fig.1 Schematic diagram of switched reluctance motor speed control system
调速系统的控制电路通过检测电机转子位置,对三相功率开关S1~S6进行控制,使功率电路的A,B,C三相电压轮流施加到电机的三相定子绕组上。由机电能量转换原理,当电机绕组通电时,转子向磁阻减小的方向旋转,实现电能到机械能的转换[3],电机工作于电动运行状态;转子向磁阻增大的方向旋转,实现机械能到电能的转换,电机工作于发电运行状态。
不同于异步电动机的工作原理,开关磁阻控制器的功率电路以及电机的绕组三相之间是互相独立的,电机侧没有类似于异步电机的星形或三角形接法。每相的功率开关与电机绕组是串联关系,不存在上下桥臂直通的危险,中小功率的开关磁阻电机调速系统一般采用IGBT作为功率开关,采用PWM控制方式。
针对开关磁阻电机的相电流控制,为了提高电流利用率,减小电磁噪声,在上下桥臂的功率开关控制技术中一般采取零压续流的工作方式,即在相电流超过给定限制值时,只关掉该相的一个功率开关,另一只功率开关保持开通,使电机绕组上的电流在零电压的状态下保持续流,其工作原理如图2所示。为了均布开关损耗,在多次零压续流控制过程中,一般上下2个功率管采取轮流关断的方式工作。
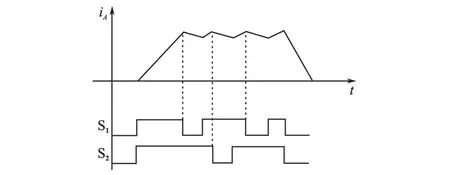
图2 零压续流控制示意图Fig.2 Schematic diagram of zero pressure and continued flow control
2 长电缆驱动过电压分析
开关磁阻电机调速系统为三相对称结构,设ZL为电机侧等效阻抗,Z0为电缆等效阻抗,开关磁阻电机调速系统的一相等效电路如图3所示。
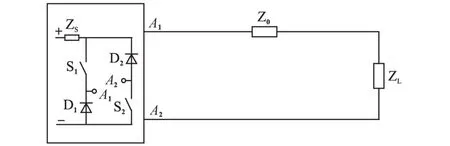
图3 等效电路示意图Fig.3 Schematic diagram of equivalent circuit
根据传输线理论定义,行波的反射系数Γ为反射电压与入射电压之比,电机侧的反射系数ΓL与电缆阻抗和负载阻抗之间的关系可以用下式表示为

对于无损电缆(电阻分量为零),其特征阻抗为

式中:L0,C0为电缆的等效电感和电容。
由于电机的等效阻抗ZL远大于电缆特征阻抗Z0,二者相差一个数量级[4],对于PWM脉冲信号,电机侧的反射系数ΓL≈1。
由此可知,当一个PWM脉冲电压信号到达电机侧时,将反射回相等的电压,与入射电压叠加后,电机端的电压将变为入射电压的2倍。
对于开关磁阻控制器侧而言,其内阻定义为ZS,根据传输线反射系数定义,控制器的反射系数ΓS如下式所示:

由于电源内阻ZS接近于0,由式(3)可知,控制器侧的反射系数接近于ΓS≈-1。当一个正电压的行波传输到控制器侧时,其反射电压将是一个负电压,其效果是与入射电压相抵消。
PWM波在电缆上的传输速度等效微波传输速度:

则PWM波在电缆上的传输时间tp与电缆长度l成正比:

由式(5)可知,PWM波传输时间与电缆参数相关。
在trise=tp情况下电机侧的反射和叠加关系如图4所示[5]。虚线1表示控制器向电机传输的PWM波,其上升沿时间为trise,幅值为Us,经过tp时间后抵达电机侧;虚线2表示电机侧反射电压为入射电压的2倍,再经过tp时间,抵达控制器侧;虚线3表示电机反射波2在控制器侧被再次反射后,与PWM波1叠加后的波形,经过tp时间后再次传输到电机侧,其幅值为负;虚线4为虚线3抵达电机侧后被再次反射加倍后的波形。实线5为电机侧的由曲线2和4合成的端电压反射波形,其震荡周期为4tp,由于反射系数定义-1<Γ<1,因此其震荡幅值是衰减的。电机端电压最大值为输入电压的2倍。
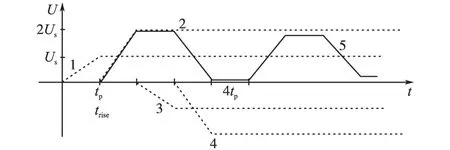
图4 电机端电压反射叠加示意图Fig.4 Schematic diagram of the motor terminal voltage reflection stack
由于端电压波形震荡周期只是关于tp的函数,因此当trise与tp相对时间发生改变时,电机端电压的幅值会出现变化。例如,当trise>2tp时,由于在tp时刻电机侧发生反射时,入射电压还没有达到额定电压,因此反射叠加电压会小于2Us;当trise>4tp,电机端电压反射叠加的影响基本可以忽略,trise=4tp波形如图5所示,虚线1表示控制器向电机传输的PWM波,虚线2表示电机端反射电压,曲线5为电机端合成电压。
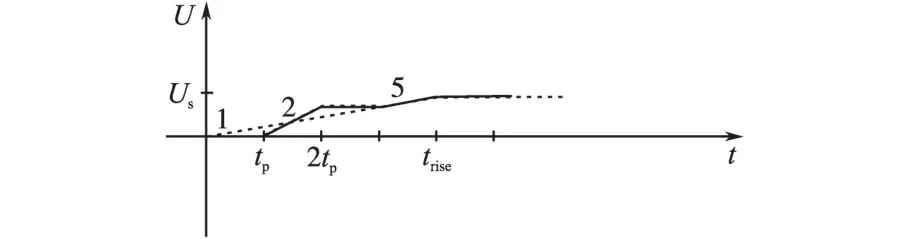
图5 电机端电压反射叠加示意图Fig.5 Schematic diagram of the motor terminal voltage reflection stack
通过以上分析可知,在电路中存在阻抗不匹配的情况下,PWM波会在电缆端部产生反射现象,导致负载侧及电缆局部出现过电压,该过电压的震荡周期与电缆参数相关,幅值与信号的上升沿时间及其在电缆中的传输时间相关,而传输时间又取决于电缆的长度。
电机采用长电缆驱动时,由于传输时间较长,在电机端将产生幅值为2倍控制电压的周期性震荡电压,过高的dv/dt会给系统和环境带来强电磁干扰,并造成电缆和电机绕组漏电流增大,使得绝缘老化速度加快。
3 过电压抑制技术
通过上一小节分析可知,改善过电压的途径可以采取以下3种方式。
1)改善电缆参数。在设备的现场应用中,功率电缆的长度应尽量短,且应尽量选择分布参数小的电缆,由式(5)可知,这样可以使得传输时间尽量减小,使其小于PWM信号的上升沿时间,达到改善电机侧过电压震荡、幅值的目的。另外,电缆分布电容小,可以有效地减小dv/dt引起的电机和电缆的漏电流,提高人员的安全和设备的可靠性。
2)阻抗匹配措施。由反射系数的定义可知,采取阻抗匹配措施,使负载端的反射系数接近于0,可以非常有效地减少反射电压。
常用的一阶阻抗匹配网络如图6所示,其可以并联在电机侧使用。
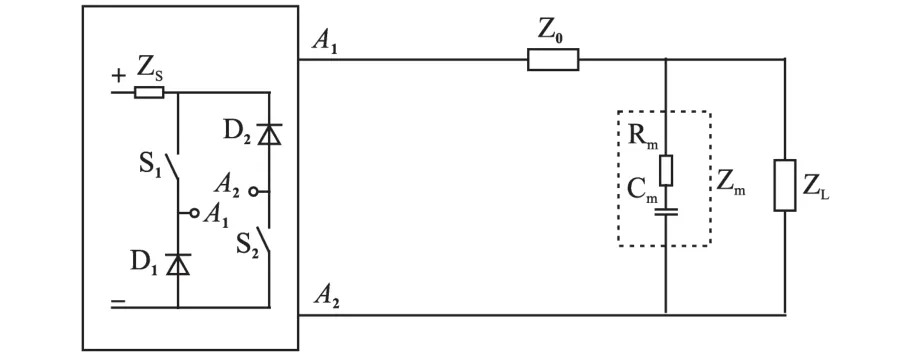
图6 阻抗匹配网络示意图Fig.6 Schematic diagram of impedance matching network
由于ZL远大于Z0,令阻抗匹配网络Zm=Z0,由反射系数式(1)可知,则可以获得ΓL接近于0,Rm和Cm的参数选择可以通过下式计算:

为避免出现谐振,同时参数应选择满足过阻尼状态[6]:

3)增加输出dv/dt滤波器。在电机侧增加阻抗匹配网络对抑制过电压会比较有效,但在现场实际使用中存在诸多不便,一般电机设计不会预留阻抗网络的安装位置,尤其是隔爆型的产品,不允许在隔爆结构以外设置非本安电路。因此,在已有的电路结构中增加输出dv/dt滤波器,减少电缆上的高频分量,增大PWM信号上升沿时间,从而达到改善电机侧过电压的目的是比较实用和可行的方案。一种安装于开关磁阻控制器侧的二阶dv/dt滤波器示意如图7所示。

图7 dv/dt滤波器示意图Fig.7 Schematic diagram of dv/dt filter
该滤波器的传递函数为

在工程设计上,从功耗、系统效率等方面考虑,电抗器的参数应考虑基波压降不大于母线电压的3%[7]。
为了取得好的滤波效果,尽可能增加PWM上升沿时间,但又不能影响正常PWM输出,滤波器截止频率一般按PWM最小占空比周期计算获得的频率的2倍进行选取,一般取截止频率处的衰减倍数为-3 dB,衰减倍数计算公式:

从阻抗匹配角度调整滤波器参数,由于控制器侧的内阻ZS接近于0,Lm等效为控制器侧的内阻,与Rm,Cm网络构成并联关系,从电缆看向控制器侧,有滤波器等效阻抗:

根据式(10),对于高频信号有Zm≈Rm,为了使控制器侧的反射系数接近于0,从而减少负反射导致的电压震荡,同时考虑过阻尼抑制,即式(8)分母表达式存在两实根,可以确定:

实际应用中,电缆的长度可以根据测量获得,其分布参数也可以通过手册查找或者直接由电缆厂商提供,再根据式(8)~式(11)基本可以确定Lm,Rm,Cm的取值,并根据应用效果对Rm,Cm做进一步调整。
由于开关磁阻电机调速系统的每相有2根电缆,且控制方式为零压续流方式,IGBT轮流对称工作,因此滤波器输入端设计应考虑阻抗匹配,将电感均分至2根输出电缆,轮流斩波时会获得比较一致的过电压抑制效果,系统连接如图8所示。
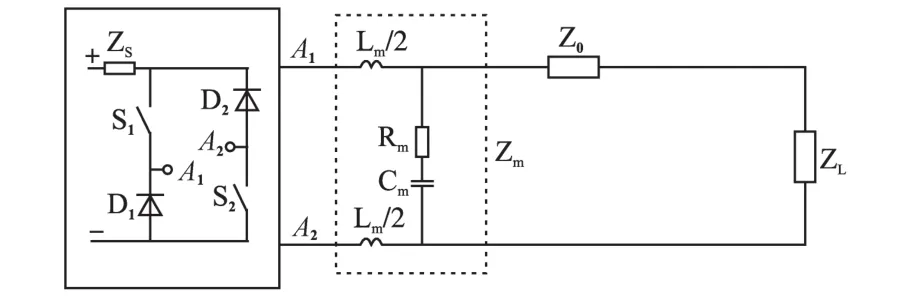
图8 阻抗匹配dv/dt滤波网络示意图Fig.8 Schematic diagram of impedance matching dv/dt filter network
4 仿真及样机验证
为了验证上述分析的正确性,本文通过仿真和样机测试对控制器侧安装输出dv/dt滤波器进行了分析和验证。
样机的主要技术参数为:开关磁阻电机调速系统额定功率400 kW,直流侧母线额定电压Us= 1 540 V,IGBT开关频率2 kHz,上升时间800 ns,电缆长度200 m,分布电容C0=0.01 nF,电感L0= 0.4 μH,可计算特征阻抗Z0=200 Ω。未增加输出dv/dt滤波器时电机端电压实测波形如图9所示,最高电压已经接近3 000 V,约为2Us。
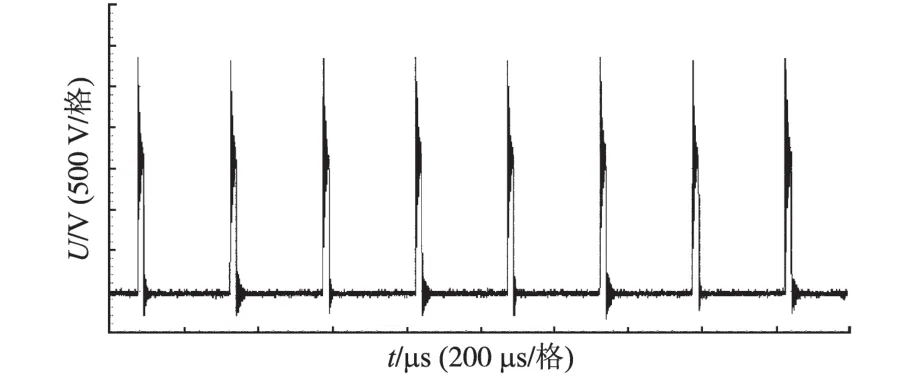
图9 无措施情况下电机端电压波形Fig.9 The motor terminal voltage waveform under the condition of no measures
验证系统采用图8所示连接方式,取Rm=200Ω,Lm=2×0.5 mH,Cm=0.16 μF,通过仿真验证此组滤波器参数,峰值电压被抑制到小于2 000 V,如图10所示。
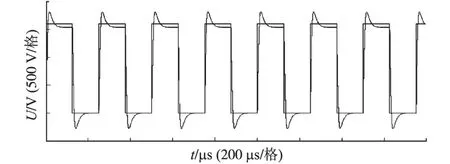
图10仿真波形Fig.10 The simulation waveform
图11 为采用仿真参数在实验样机上测试获得的电机端电压波形,其中图11a只在A1上串接电感,可见相邻2个波形过电压的幅值会产生差异,滤波器对上下2只轮流工作的IGBT开通边沿产生的过压抑制作用不对称。图11b为在A1,A2均串接电感,过压抑制效果较好,电机端电压的峰值被控制在2 000 V以内。
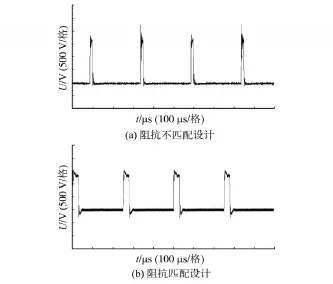
图11 实际测量波形Fig.1 1Measured waveforms
5 结论
综上所述,本文基于传输线理论,在分析脉冲波在电缆上传输及反射过程的基础上,结合开关磁阻电机的功率电路拓扑结构和控制特点,提出过电压抑制的解决方案,并取得了明显效果。
因为dv/dt滤波器参数需要根据电缆参数及现场的实际使用距离等因素确定,出于系统可靠性和批量生产考虑,建议采用PWM控制技术的调速系统设计,其电机绕组及电缆的绝缘材料的选用较工频使用时提高一个耐压等级。
[1]吴建华.开关磁阻电机设计与应用[M].北京:机械工业出版社,2000.
[2]伍云山.电动机机壳表面带电现象分析[J].电机电器技术,1992(4):20-21.
[3][日]宫入庄太.机电能量转换[M].北京:机械工业出版社,1982.
[4]Bentley J M,Link P J.Evaluation of Motor Power Cables for PWM AC Drives[J].IEEE Trans.on IA,1997,32(2):342-358.
[5]万健如,林志强,禹华军.高频PWM脉冲波传输引起电机端子过电压的研究[J].中国电机工程学报,2001,21(11):43-47.
[6]张兴,张显立,谢震,等.双馈风力发电变流器长缆驱动及其过电压抑制[J].电力系统自动化,2006,30(21):44-47.
[7]颜斌,陈希有.变频器输出RLC正弦波滤波器的工程设计[J].电机与控制学报,2002,6(3):256-270.
Research of Overvoltage Suppression Technique and Long Cable Driving for SRD
DING Jin⁃long
(China Tex Mechanical&Electrical Engineering Ltd.,Beijing 101102,China)
When the driving mode with long cable switched reluctance motor drive system,will cause the motor overvoltage,thereby shortening the cables and the motor life.Based on the transmission line theory,based on wave transmission on the cable and the reflection process analysis of pulse,combined with the power circuit topology and control characteristics of switched reluctance motor drive system,dv/dt suppression scheme and the motor and cable use principle was put forward,and is verified through the simulation and prototype.
switched reluctance;speed control motor;long cable driving;dv/dt suppression
TM346
A
2014-08-18
修改稿日期:2015-03-04
丁金龙(1979-)男,高级工程师,Email:dingjinlong@263.net
