自平衡两轮车的线性霍耳位置检测技术研究
2015-07-18谭俊杰杨振强杜署明
谭俊杰,杨振强,杜署明
(大连理工大学电气工程学院,辽宁大连116024)
自平衡两轮车的线性霍耳位置检测技术研究
谭俊杰,杨振强,杜署明
(大连理工大学电气工程学院,辽宁大连116024)
针对自平衡两轮车平稳行驶需提供高精度电机转子位置信号的问题,提出并实现基于线性霍耳传感器的永磁同步电机控制系统。采用设计的零漂抑制电路,消除位置信号的零点漂移;通过DSP分区间读取位置传感器信号,解决运算溢出问题,提高了位置信号解算精度。实验结果表明:该方法能有效抑制线性霍耳位置零漂,保证永磁同步电机位置检测精度要求,实现自平衡两轮车平稳控制。
自平衡两轮车;线性霍耳传感器;永磁同步电动机
自平衡两轮车是一种类似倒立摆的两轮车,轮子左右分布。其在没有控制的情况,不能保持直立平衡,因此需要控制芯片维持平衡。其运作原理主要是建立在一种被称为“动态稳定”(dynamic stabilization)的基本原理上,利用车体内部的陀螺仪和加速度传感器,来检测车体姿态的变化,并利用伺服控制系统,精确地驱动电机进行相应的调整,以保持系统的平衡。平衡车除了有电源开关外,基本没有其他开关用于控制。只要电源有足够的电量,就不会跌落,与需要人自己控制行进的滑板车等交通工具不同。该系统灵活性强且结构简单、操作容易、无污染,可作为大众在多种场合的代步工具[1]。
1 永磁电机基于线性霍耳的优势
永磁电机的转子采用永磁体,无需励磁电流就能产生转子磁场,提高电机的有功输出。其性能高、体积小、重量轻、功率密度大,能减小对有效车载空间的占用,且转动惯量比大,过载能力强,能满足电动汽车快速启动、频繁起停的要求[2]。永磁同步电机采用空间矢量脉宽调制技术(SVPWM)驱动时,能在电气和机械方面做到更加平滑安静,转矩脉动非常小。因此,保证自平衡车两轮平稳行驶,轻盈灵活,即开即停等性能,应采用永磁同步电机。
永磁同步电机的SVPWM驱动需要实时检测转子位置和速度作为反馈信号,进行坐标变换来实现对电流大小和方向的控制。位置检测的方法主要有光电码盘,旋转变压器和霍耳传感器等[3]。
光电码盘和旋转变压器的成本高,开关型霍耳传感器的位置检测精度低不适合用于平衡车系统中。而线性霍耳位置传感器检测位置,有较高的精度,较宽的频带和较好的稳定性、抗干扰性,成本低,安装简单,是一种性价比较高的位置检测方式,可以应用在各个领域[4]。因此,电机的位置检测采用线性霍耳位置传感器。
线性霍耳位置传感器的原理就是一种霍耳效应,并且在一定范围的磁场内随着磁密大小的变化正比的线性输出电压信号。是一种磁敏式传感器。因其线性正比于转子磁场的输出特性,当永磁同步电机运转时,转子位置的改变就会改变磁场大小,相应的线性霍耳传感器输出电压信号也会改变,这样通过线性霍耳传感器就可以获得转子的连续位置和速度信号[5]。
通过对永磁体磁环的优化可使其产生正弦的气隙磁场,这样线性霍耳传感器输出电压信号也是一个正弦信号。然而,只采用1个线性霍耳传感器时,其在1个电气周期产生的正弦电压信号的同一个电压值对应于2个电角度值,不能直接检测出转子位置信号。在此,采用双霍耳进行转子位置检测,即在永磁同步电机上安装2个电角度相差90°的线性霍耳传感器。这样线性霍耳传感器产生2路正交的电压信号,分别作为转子位置电角度的正、余弦,可以直接检测转子位置和速度信号。其输出电压波形如图1所示。
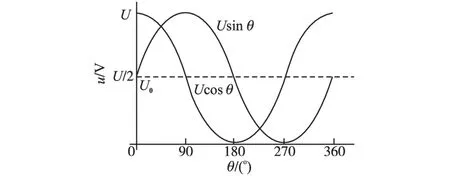
图1 线性霍耳传感器的输出电压波形Fig.1 The output voltage waveform of linear hall⁃effect sensors
其中2个霍耳传感器的电压信号为

式中:θ为永磁同步电机转子位置的电角度;U为最大磁密时,线性霍耳传感器输出电压;U0为零磁密时,线性霍耳传感器输出电压。
由于安装误差,以及环境温度和器件本身的因素影响,并且线性霍耳传感器在采集信息时同时也向控制应用系统引入干扰,导致电压信号产生零点漂移(U0值的偏移)。因此,需要对电压信号进行抑制零漂电路的零点U0校正,使U0维持在一定值不变,改善输出特性。
2 抑制零漂电路
一般抑制零点U0漂移的方法采用霍耳传感器互补组合法,在同一位置安装2个霍耳传感器,同一敏感面相叠放在一起,即方向相反。这样输出2个互差180°(电角度)的电压信号,具有差分特性,通过减法电路后,达到抑制共模信号、放大差模信号的功能[6],抑制零点U0漂移,详见文献[6]。采用互补组合法时,需要安装4个霍耳传感器,安装精度和工艺要求高,尽管采用相同型号批次的霍耳传感器,每个霍耳传感器受外界影响时的零点漂移也各不相同,由此2个霍耳传感器差分放大输出的零点漂移依然存在。在此,采用一种抑制零漂电路,在原有2个霍耳传感器的基础上,通过反馈补偿来抑制零点U0的漂移。
抑制零漂电路是由运放、TL431、电阻和电容搭建而成,对以U0=1.5 V为基准的电压信号进行零点抑制,原理图如图2所示。
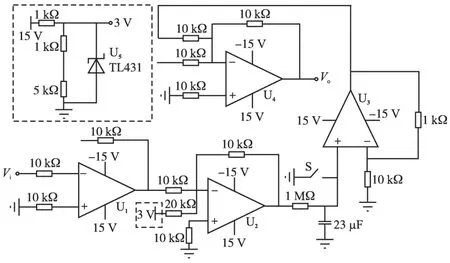
图2 抑制零漂电路原理图Fig.2 Zero drift suppression circuit schematic
图2 所示电路是单个霍耳传感器的抑制零漂电路,霍耳传感器的输出作为电路输入电压信号波形Vi(U0=1.5 V),电路的输出电压信号为Vo。Vi输入经过U1运放,输出方向相反的电压波形。然后波形分为2路:一路经过U2运放和3 V,20 kΩ的直流量(相当于1.5 V)相加输出与Vi同相的以零电压为基准的电压波形,如果输入Vi零点U0向上漂移,此时经过U2输出的电压波形的正值部分大于负值部分,经过后面由RC搭建的滤波电路,输出的电压波形,正充电大于正放电,正直流量一直在累加,进而得出零点U0向上漂移的的直流量,为正电压值;同理,如果输入Vi零点U0向下漂移,经过U2的电压波形正值部分小于负值部分,经过RC电路时,负充电大于负放电,一直累加得出零点U0向下漂移的直流量,为负电压值;亦可知,如果输入Vi零点U0没有漂移,经过U2的电压波形正值部分与负值部分相等,经过RC电路时,负充电等于负放电,无直流量。经过RC电路后得出漂移量经过运放U3作为反馈信号。Vi经过U1后,另一路与反馈信号相加抑制零点U0漂移(当Vi向上漂移时,经过反向后向下漂移,反馈值经上述分析为正电压值,相加抑制零点U0漂移;反之同理可得抑制零点U0漂移),经过U4反向电路得出输出电压波形Vo,与输入Vi同向。此时,输出电压波形Vo是抑制零点U0漂移后的霍耳电压信号,具有良好的输出特性。
图2中,U0=1.5 V的电压由3 V,20 kΩ产生,其3 V电压由TL431稳压产生。TL431是可控精密稳压源,其输出电压受温度影响小、性能好、价格低,能提供准确、受周围环境影响小的稳定电压,保证U0=1.5 V不漂移。图2中虚线部分,是TL431的应用电路,用2个电阻1 kΩ,5 kΩ设定输出电压3 V,用来提供U0=1.5 V的电压。
在电机没有运转的情况下,磁场大小不变,线性霍耳输出是直流电压量不变,此时,若进行零漂抑制,RC电路前面一直是直流电压,反馈值不是漂移量,导致输出电压信号错误,故不应使用抑制零漂电路;当电机运转起来后,方能使用抑制零漂电路。通过软件控制图2中的开关S,在电机停的时候,开关S闭合,相应的反馈量为零,抑制零漂电路不起作用,读取电压信号;当电机运转后,开关S断开,相应的反馈量取出电压信号的漂移量,抑制零漂电路工作,抑制零漂读取电压信号。
3 芯片解码
由于线性霍耳位置传感器随着转子的改变,输出的信号为2个正弦余弦波形,需由DSP芯片TMS320F28069进行解码。DSP芯片对电压信号AD采样后,再计算出反正切函数值并折算得出电机转子的位置信号,DSP芯片可以用解码得到的转子位置信号对电机进行SVPWM驱动。在F28069芯片中,有反正切函数的算法,即arctan(Usin/Ucos),这种求反正切函数算法又称为“直接法”。进行位置解码时,程序简单易行是其最大优点。但是该方法有个缺点:精度低,主要原因是必须先做除法运算后再求反正切函数,而此时的Usin和Ucos的误差会通过除法运算而被放大,特别当Ucos在0附近时更会如此,且有可能溢出,因此需要进行软件处理,避开该缺点。
首先,对比各个三角函数的分辨率,在角度位置为90°和89°的正弦值为1和0.999 8,此处,相差1°对应的正弦值相差为0.000 2,在此把0.000 2叫做90°正弦的分辨率。由此可以依次求出正弦余弦和正切余切在特殊点的分辨率。正弦余弦和正切余切在特殊点的分辨率对比如表1所示。

表1 三角函数分辨率对比Tab.1 Comparison of trigonometric function resolution
从表1可以看出,正弦和正切在90°和270°附近分辨率低,误差高;而余弦和余切在0°和180°附近分辨率低,误差高。因此,为了提高位置角度的精度,采用的方式是,正切余切切换,避开分辨率低、误差高的地方。正切余切的函数图如图3所示。
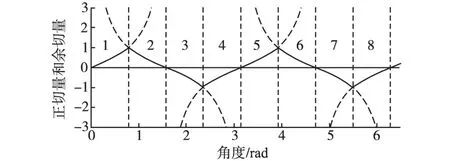
图3 正切余切函数图Fig.3 Function diagram of tangent and cotangent
对一个360°(电角度)周期进行细分,分为8个区间,每个区间大小是45°(电角度),如图3所示。在区间1,4,5,8内,采用反正切函数进行计算转子位置电角度;在区间2,3,6,7内,采用反余切函数进行计算转子位置电角度。这样避免小数做除数时误差被放大和溢出的可能,提高转子角度的检测精度。芯片解码时,首先找出转子位置角度处于哪个区间。判断依据如表2所示,其中a是正弦值,b是余弦值,1为真,0为假。
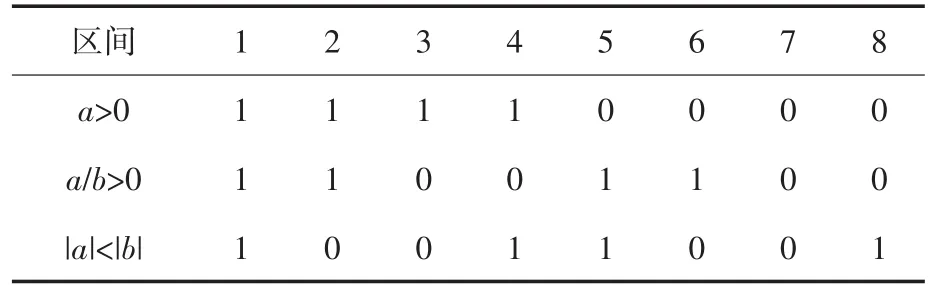
表2 区间判断依据Tab.2 Basis of interval judgment
由上述判断依据可知,在芯片编程时,可以这样实现:在|a|<|b|时,采用反正切求得;在|a|>|b|时,采用反余切求得。这也就是前面所说的避免小数做除数,减少误差。由于正切余切为180°一个周期,在芯片求反正切时,所得角度为(-90°,90°),且没有反余切算法,因此,需要做一些变换,反余切的算法可以通过90°减去用反正切算法对余切值进行运算得到的角度得到。区间1由反正切直接求得无需折算;区间2和区间3由上述求反余切的方法求得;区间4由180°加去反正切求得角度值折算所得;区间5,6,7,8与区间1,2,3,4对称,可有对应区间求得的角度值加上180°折算所得,将其转换到360°周期里。
综上所述,在DSP芯片里计算角度,总结为下述函数表达式:
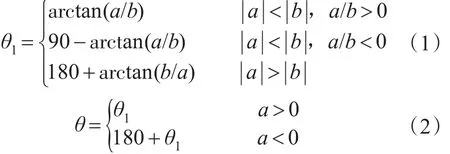
位置角度的检测主要在PWM中断服务程序中进行,具体的程序流程设计如图4所示。
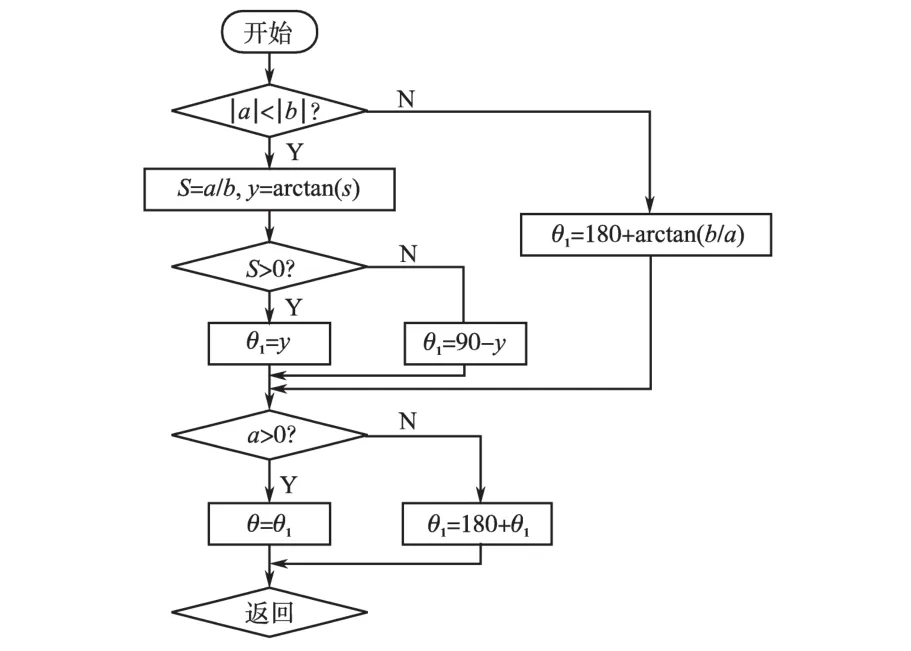
图4位置检测流程图Fig.4 Flow chart of position detection
图4 中θ为所需求得的转子位置角度,减少误差和溢出的可能,提高了角度位置的精度。
4 实验结果与分析
4.1 抑制零漂电路仿真测试
通过Multisim仿真软件的电路搭建对抑制零漂电路进行仿真,验证能否抑制零点U0漂移,以及抑制零点U0漂移的效果,仿真电路如图5所示。
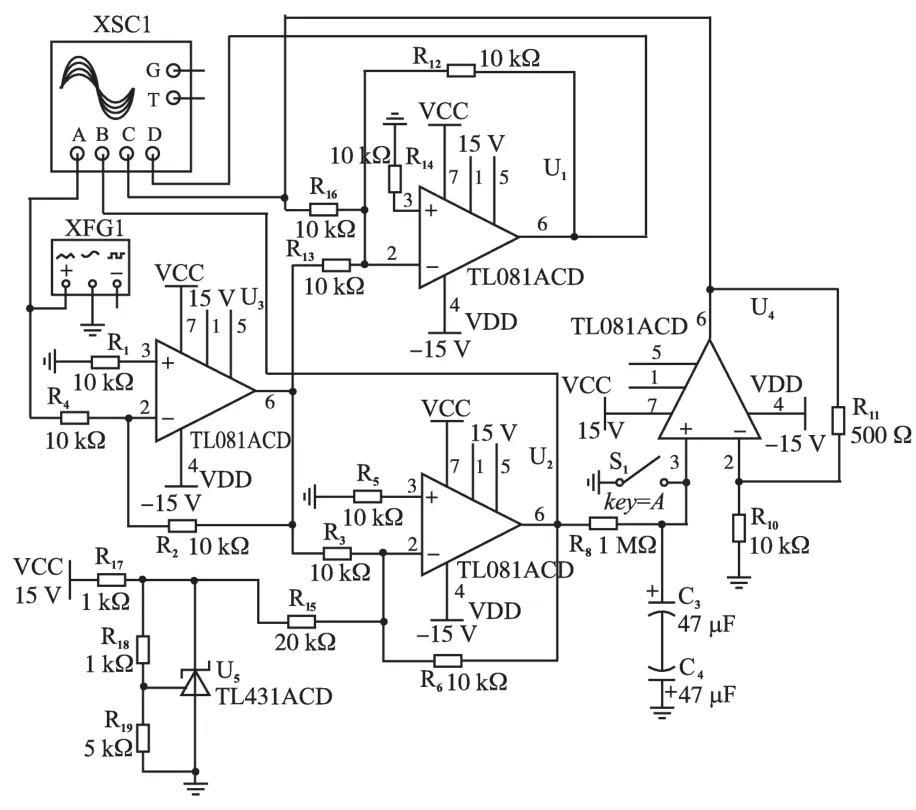
图5 仿真电路图Fig.5 Simulation diagram
输入信号由软件信号发生器提供,用示波器观察信号波形,输入电压信号以U0=1.5 V为基准,上下漂移时观测波形。示波器中:A代表输入电压信号,B代表经过U2后以零电压为基准的电压信号,C代表反馈电压信号,D代表输出电压信号。
首先验证开关S1的作用,当图5中的开关S1闭合时,输入信号零点U0向上漂移时,示波器波形如图6所示。
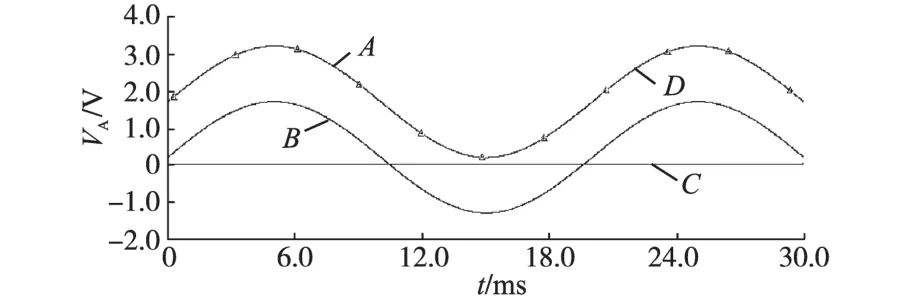
图6 开关闭合时向上漂移信号波形Fig.6 Upward drift signal waveform when switch on
由图6可验证,当开关S1闭合时,输入输出完全相同,抑制零漂电路不工作。
当图5中的开关S1断开时,上下漂移观测波形如下:
1)当输入信号零点U0向上漂移时,示波器波形如图7所示。

图7 开关断开时向上漂移信号波形Fig.7 Upward drift signal waveform when switch off
2)当输入信号零点U0向下漂移时,示波器波形如图8所示。
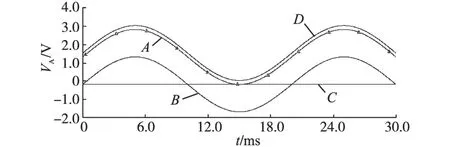
图8 开关断开时向下漂移时信号波形Fig.8 Downward drift signal waveform when switch off
通过示波器观测,当开关S1断开时,抑制零漂电路工作,当输入A上移或下移的时候,抑制零漂电路会取出其上移或下移的漂移量C作为反馈与输入相加,将其向下或者向上进行抑制零点U0漂移。
在不同漂移量下,计算经过抑制零漂电路得到位置角度的精度。分别对理想电压信号和经过零漂电路的电压信号,应用芯片解码中式(1)和式(2)计算出对应的位置角度θ0(真实值)和θ1(测量值),计算绝对误差:

首先根据式(3)计算U0=1.42 V,漂移量为-0.08 V,在(1°,360°)区间的绝对误差(步长为1°),绘制出图9。
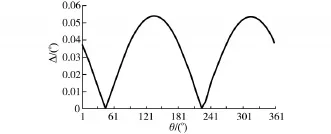
图9 绝对误差Fig.9 The absolute error
由图9可以看出,随着角度的增大,绝对误差近似正弦变化,取最大绝对误差表示位置角度的精度。在不同漂移量下,经过抑制零漂电路得到的输出电压信号相对以U0=1.5 V电压为基准的理想正弦信号的差值,且计算出角度的最大绝对误差,绘制出表3。
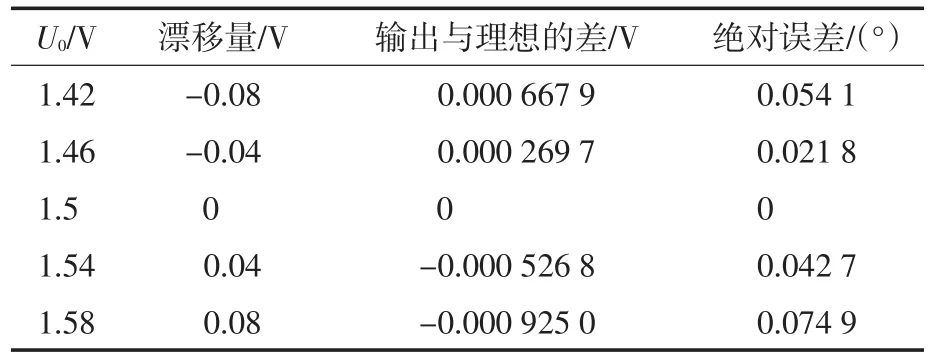
表3 不同漂移量下输出和理想正弦信号的差Tab.3 Difference between the output and the ideal sinusoidal signal under different amount of drift
由表3可知,当输入漂移时,经过抑制零漂电路得到输出电压信号与理想电压信号差值很小,抑制了零漂,有良好的输出特性的输出电压信号,零漂基本消除,说明抑制零漂电路起到抑制零点U0漂移的作用,且效果显著。位置角度精度比较高,在上下漂移量为0.08 V的范围内,可以保证绝对误差在0.074 9°范围内,满足自平衡车的控制要求。
4.2 自平衡车平台测试
为了验证仿真结果的正确性,选取TMS320F28069作为控制芯片,采用MPU6050惯性传感器作为车身倾角检测装置,利用互补滤波算法解算得到车身倾角[7],以永磁同步电机作为平衡车动力驱动。
在自平衡两轮车上加入抑制零漂电路,电机线性霍耳传感器的输出接抑制零漂电路输入,抑制零漂电路输出接芯片AD口进行实验,转动电机观测抑制零漂电路输入输出电压信号波形如图10所示。
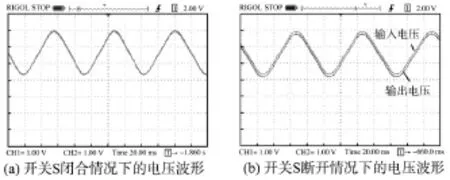
图10 抑制零漂电路在工作和不工作情况下的信号波形Fig.10 Signal waveform of zero drift suppressioncircuit at work and do not work situations
图10 a是在开关S闭合情况下的电压波形,此时抑制零漂电路不工作,输入输出相同,电路正确。图10b是在开关S断开情况下的电压波形,输入信号向上有漂移,经过电路输出向下抑制,电路正确。
位置检测方法采用开关型霍耳元件和线性霍耳元件试验对比,见表4。
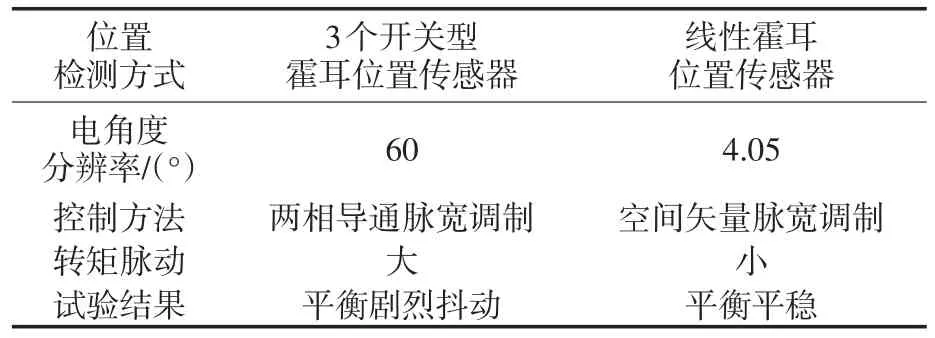
表4 试验对比Tab.4 The comparison of tests
采用开关型霍耳元件进行位置检测时电角度分辨率为60°,在自平衡车上,当电机转过一定角度时,位置检测不到,且采用两相导通脉宽调制控制,转矩脉动大,平衡时剧烈抖动。由于自平衡两轮车采用了线性霍耳位置传感器和抑制零漂电路的检测技术,位置检测精度高,在电动车中间平衡位置的时候,能精确地找到电机转子的位置,采用空间矢量脉宽调制,根据不同的位置给出相应的占空比,输出转矩脉动小,实现平衡车的平衡控制和平稳运行。
5 结论
由于自平衡两轮车采用了装有线性霍耳位置传感器的永磁同步电机,位置检测精度高,且通过抑制零漂电路进行抑制和减小外界干扰造成的零点漂移,以及通过软件分区间进行解码处理,保证位置读取的可靠性和精准度,为空间脉宽调制技术提供实时准确的位置信号,提高驱动性能,实现系统转矩脉动小、平稳安静的运行。为自平衡两轮车平稳行驶、平衡运动控制实现提供了保证。
[1]Tsai M C,Hu J S,Hu F R.Actuator Fault and Abnormal Op⁃eration Diagnoses for Auto⁃balancing Two⁃wheeled Cart Con⁃trol[J].Mechatronics,2009,19(5):647-655.
[2]杨帆.电动车用永磁同步电机无传感器矢量控制系统[D].大连:大连理工大学,2013.
[3]付彦超.基于线性霍耳的交流永磁同步电机伺服驱动系统[D].哈尔滨:哈尔滨工业大学,2011.
[4]张永宜,郗珂庆.基于线性霍耳器件的位置解码方法[J].电子科技,2008,21(8):9-11.
[5]叶伟,张晓光,孙力.基于线性霍耳传感器的高速永磁同步电机控制系统设计[J].伺服控制,2010,10(3):41-44.
[6]邱召运,姜广东,刘其涛,等.线性霍耳元件的互补组合及其差分式应用[J].自动化仪表,2010,31(4):19-21,24.
[7]梁延德,程敏,何福本,等.基于互补滤波器的四旋翼飞行器姿态解算[J].传感器与微系统,2011,30(11):56-58.
Motor Position Detection Method by Linear Hall⁃effect Sensors of Two⁃wheeled Self⁃balancing Vehicle
TAN Jun⁃jie,YANG Zhen⁃qiang,DU Shu⁃ming
(College of Electrical Engineering,Dalian University of Technology,Dalian 116024,Liaoning,China)
To achieve smooth driving of the two⁃wheeled self⁃balancing vehicle which requires highly precise motor rotor position signal,a permanent magnet synchronous motor(PMSM)control system based on linear hall⁃effect sensors was developed.A drift suppression circuit was designed to eliminate the zero drift of position signals; processing the position signals with different methods according to different ranges using digital signal processor(DSP)solved arithmetic overflow and improved the accuracy of the position signal.Experimental results illustrate the proposed method can effectively eliminate zero drift of linear hall⁃effect sensors which ensure PMSM position detection accuracy and achieve smooth control of two⁃wheeled self⁃balancing vehicle.
two⁃wheeled self⁃balancing vehicle;linear hall⁃effect sensors;permanent magnet synchronous motor(PMSM)
TM351
A
2014-10-27
修改稿日期:2015-04-09
谭俊杰(1990-),男,硕士研究生,Emial:junjiedlut@163.com