一种基于一维元胞自动机的灾害后果推演模型
2015-07-07荣莉莉周培亨
荣莉莉, 周培亨, 张 荣
(大连理工大学 系统工程研究所,辽宁 大连 116024)
一种基于一维元胞自动机的灾害后果推演模型
荣莉莉, 周培亨, 张 荣
(大连理工大学 系统工程研究所,辽宁 大连 116024)
突发事件发生后,其灾害后果随时间不断演变。了解灾害后果的发展趋势,有助于快速应急响应,为此提出了一种灾害后果推演模型。首先从承灾体角度,考虑灾害后果的共性,描述了突发事件灾害后果的演化机理;然后提出基于一维元胞自动机的灾害后果推演模型,完成了对元胞、元胞空间、邻居和规则的设置。最后,通过两个算例说明了本文提出模型的有效性。该模型适用于多种突发事件,推演的结果能为应急决策提供支持。
应急管理;承灾体;元胞自动机;灾害后果;应急决策
0 引言
近年来,各类突发事件频繁发生,造成了严重的灾害后果,同时也突显出当今社会对应急管理的迫切需求。突发事件是随时间不断演变的复杂系统,这种演变使得应急决策主体所面对的突发事件状态不断变化。应急决策主体在制定应急行动时,如果能事先知道突发事件随时间发生发展的趋势,可以达到提高效率、降低损失、避免灾害后果扩大化的目的。应急行动方案对应的是灾害后果,从应急需求角度考虑,对灾害后果的严重程度及其走向有所了解,有助于决策者动态调整应对方案,减轻突发事件带来的损失。
目前关于突发事件推演的研究主要可归纳为两个方面,一方面是相关概念的研究,主要是对情景及情景相关概念的界定。“情景”一词最早出现于1967年Kahn和Wiener合著的《2000年》一书中[1],不同学者根据自己的领域和研究需要对情景作了不同的定义,如姜卉[2]等从情景演变的角度,将情景定义为决策主体所正在面对的突发事件发生发展的态势,其中“态”是指突发事件当前所处的状态,是事件在过去的时间段里发展到现在的一个结果,“势”是指事件在当前状态的基础上在未来的发展趋势;刘铁民[3]认为,情景不是一个具体事件的投影,而是无数同类事件和预期风险的集合,突发事件情景可以代表性质基本相似的事件和风险,尤其是基于“真实事件”而凝练、集合成的“虚拟事件”情景,更能体现出各类事件的共性与规律;王文俊等人[4]认为,情景是指某一时刻现场的情景或应急处置力量的状态,包括空间的信息、伤亡信息和资源消耗等;吴广谋等[5]将重特大事故应急决策中的情景定义为在重特大事故中,决策主体所面对的事故发生、发展的各个阶段的状态。
另一方面则是针对具体推演模型的研究。方志耕等[6]运用GERT模型,构建了包含突发事件自身演化过程和抢险救灾行动的GERT网络,并建立了基于贝叶斯推理的灾害后果演化动态GERT网络模型;柳春光[7]提出了一种基于元胞自动机的城市地震次生火灾蔓延模型,对区域内火灾的蔓延情况进行了模拟;袁晓芳等[8]运用PSR模型构建了突发事件的“压力-状态-响应”网络表达式,并基于贝叶斯网络理论构建了突发事件的情景推演模型;Hoya[9]提出了基于元胞自动机的传染病传播模型,将元胞状态表示为该元胞内易感(S)、感染(I)、康复(R)三类人所占的比例,模拟了传染病的传播;Stéphane Hallegatte[10]提出了一种适应区域的投入产出模型,并将该模型应用到对卡特里娜飓风造成的经济损失的分析中;Kenneth G. Crowther[11]等给出了一种系统的风险评价IIM模型,并用该模型评估了风险管理政策的影响。
从目前对突发事件演化的研究来看,主要以情景为核心描述推演的对象和模型,其中一般是针对一种特定情景建立一种推演模型。另一方面,众所周知,突发事件的应急响应是针对灾害后果的,虽然关于情景的研究涉及了“态”、“势”,并没有明确强调灾害后果,但灾害后果显然是突发事件情景的重要组成部分,对灾害后果的推演即是对事件中态和势随时间发生发展过程的推演。突发事件种类繁多,其灾害后果各不相同,需要针对每一种灾害后果研究推演模型。针对这一情况,本文提出从承灾性出发,研究灾害后果演化的机理,获取灾害后果演化的共性,在此基础上构建突发事件灾害后果的推演模型。并以传染病和城市火灾为例进行了说明。与同类模型相比,该模型能反映灾害后果随时间发展变化的趋势,并能在一定的时间步之后得到稳定的灾害后果。
1 基于承灾体拓扑关系的突发事件灾害后果演化机理
在对突发事件灾害后果的研究中,自然灾害领域在早期就有关于灾害后果的定义:灾害后果,又名灾情,是指在一定的孕灾环境和承灾体条件下,因灾而导致某个区域内的生命和财产损失情况。灾害系统论认为灾害后果(D)的发生是由致灾因子(H)、孕灾环境(E)和承灾体(S)共同作用的结果(图1)[12]。
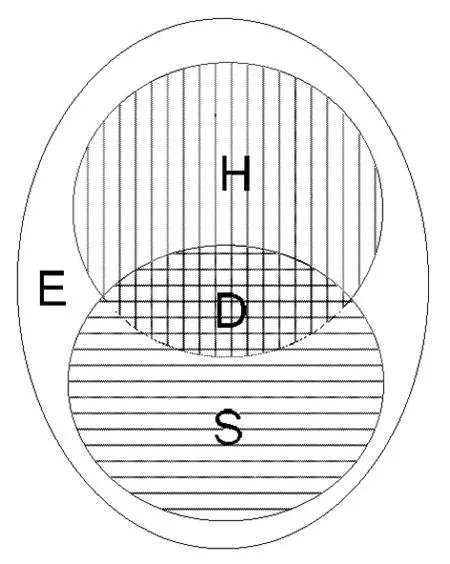
图1 灾害系统结构图
承灾体是致灾因子的作用对象,也是突发事件发生后应急救援的对象,是人类及其所在社会与各种资源的集合。因此,灾害后果的具体内容就体现为突发事件对承灾体的破坏和影响。突发事件发生时,致灾因子作用于部分承灾体使其受损,随着时间的推移,受损的承灾体可能恢复到正常状态,也可能作用于其他承灾体,造成进一步的灾害后果。区域内的所有承灾体最终将达到一个稳定的状态,这一变化过程就是突发事件灾害后果的演化。
突发事件发生后,区域内最终受损的承灾体总数和承灾体间的拓扑关系是相关的。当具体的时空条件确定后,承灾体之间的物理拓扑关系就是固定的,用相离、相邻、相交和包含四种关系来描述(图2),承灾体之间的物理拓扑关系只和区域内承灾体的空间分布有关。
承灾体之间的物理拓扑关系并不能代表承灾体间的影响关系。以有毒气体泄露为例,当有毒气体装置与人相距较远时,人和有毒气体装置之间是相离的关系,但是当有毒气体泄露以后,随着有毒气体的扩散,人会中毒,说明有毒气体的影响范围是包含人的。因此,需要引入影响拓扑关系来描述承灾体间的影响关系,同样用相离、相邻、相交和包含四种关系来描述(图3)。当承灾体受损造成灾害后果后,会有自己的影响范围,这个影响范围一般大于或等于它的物理空间,即承灾体间的影响拓扑关系是大于或者等于承灾体间的物理拓扑关系的。
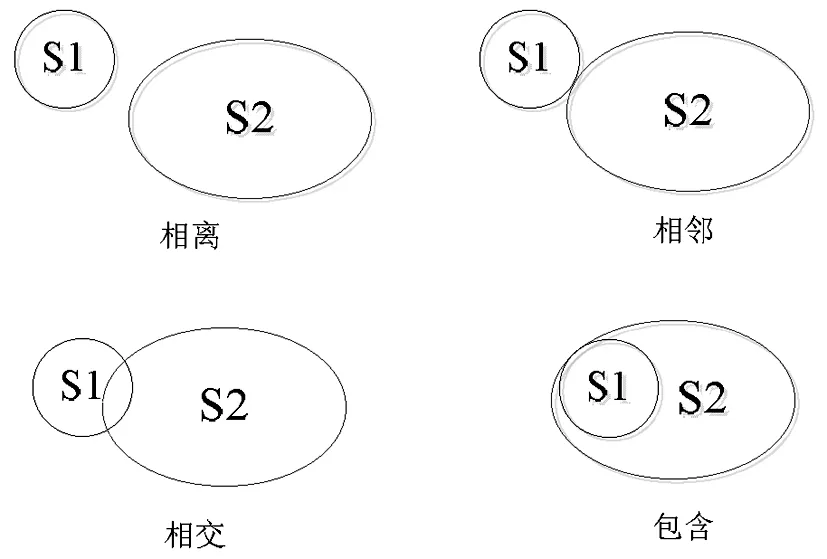
图2 承灾体间物理拓扑关系示意图

图3 承灾体间影响拓扑关系示意图
当承灾体间的影响拓扑关系为相离时,承灾体之间不会产生影响;当承灾体间的影响拓扑关系为相邻、相交或者包含时,受损承灾体会对另一个承灾体产生影响。由此可见,突发事件灾害后果形成的过程中,受损的承灾体间影响拓扑关系应当是相邻、相交或者包含的。
2 突发事件灾害后果推演模型
标准的元胞自动机是一种时间、空间、状态都离散的非线性动力学系统。大量的元胞通过简单的局部规则可以形成复杂的宏观现象,这一过程和突发事件灾害后果的演化过程是相似的。因此,本文从承灾体的角度出发,抽取致灾因子、承灾体间相互作用及承灾体脆弱性等因素之间的共性规则,构建基于元胞自动机的推演模型。
2.1 一维元胞自动机的优势
元胞自动机(Cellular Automata,简称CA)最早是由冯·诺依曼提出的一类离散的动力学系统,与传统的方法相比,元胞自动机能更好地模拟晶格生长、流体形成、雪花形成等难以解析表达的复杂现象,因此常用于模拟各种复杂系统的演化[13]。图4为90号规则的标准一维元胞自动机。

图4 标准一维元胞自动机示例
元胞自动机可以表示为一个四元组:A=(Ld,S,N,f)。在这里A代表元胞自动机系统;Ld代表元胞空间,即元胞所处的空间,是一种离散的空间网格,d表示元胞空间的维数;S是元胞离散且有限的状态集合;N代表元胞的邻居集合,一维元胞自动机的邻居通常用半径r来表示,在中心元胞半径r范围内的所有元胞即为该中心元胞的邻居;f是元胞自动机状态转换的局部规则,即根据t时刻某个元胞的所有邻居的状态组合来确定t+1时刻该元胞的状态值。
元胞自动机本质上是一种计算模型,它将元胞空间内所有元胞在t时刻的状态作为输入,计算其在t+1时刻的状态作为输出。一维元胞自动机被证明是可以进行普适计算的[14]。A R Smith III构建了一种18状态的邻居半径为1的一维元胞自动机,该模型具有普适计算能力[15]。这一模型中元胞状态数由J Albert和K Culik II减少到了14[16]。Jean-Baptiste Yunès[17]通过构建一种“网格”,使一维元胞自动机实现了通用计算。基于一维元胞自动机的上述优势,以及相对于高维元胞自动机在规则上的简洁性,本文选择一维元胞自动机来推演突发事件所导致的灾害后果随时间发展变化的过程。
2.2 基于一维元胞自动机的推演模型
本节从承灾体的角度出发,根据对突发事件灾害后果产生过程的分析,从中抽取规则,构建灾害后果推演模型。构建元胞自动机推演模型的关键就是完成对元胞空间、元胞、邻居及规则四部分的设置。
2.2.1 元胞与元胞空间
(1)元胞空间
模型推演的具体区域即为元胞空间,本文采用的是一维元胞自动机模型,所以需要将现实中的空间区域转化到一维空间中。转化后元胞的邻居半径取为1,即每个元胞的邻居为其左右的两个元胞。
(2)元胞
区域内的承灾体即为元胞,本文提出的模型中元胞都是同质的。元胞的状态空间如下,一个元胞在任意时刻可能处于其中的一种状态:
①正常状态的承灾体,未受到外界作用力造成相应的灾害后果,或曾受损但已恢复到正常状态且不具有免疫力,用0表示该状态。②承灾体受到外界作用力造成相应的灾害后果,且会对周围其他承灾体造成影响,用1表示该状态。③承灾体受到外界作用力造成相应的灾害后果,但不会对周围其他承灾体造成影响,用2表示该状态。④承灾体受损后恢复到正常状态,且对其它受损承灾体的影响具有免疫力,用-1表示该状态。
以上四种状态中只有元胞状态为1时相应的承灾体才会对其他承灾体产生影响,只有元胞状态为0时相应的承灾体才会受其他承灾体影响。
2.2.2 推演规则分析与构建

依次对处于0、1、2、-1状态的元胞进行分析。当元胞状态为0时,若邻居中没有状态为1的元胞,则其状态保持不变。若邻居中有状态为1的元胞,则其下一时刻状态可能由0变为1,即对应的承灾体受损;当元胞状态为1时,该元胞下一时刻可能变为状态2、-1或0,分别对应进一步受损、恢复且对其它受损承灾体的影响具有免疫力、恢复但对其它受损承灾体的影响不具有免疫力;当元胞状态为2或-1时,元胞状态不会再改变。
元胞状态发生改变的概率P和时空环境、周围元胞状态、元胞对应的承灾体脆弱性、人为干预等因素有关,即:P=F(E,C,BD,H),其中E表示突发事件发生的时空环境对灾害后果的影响,C表示周围受损承灾体对该元胞对应的承灾体的影响,BD表示承灾体相对该种突发事件的脆弱性,H表示人为干预造成的影响。
因此,构建模型规则如下:

若周围两个元胞状态都不为1,则该元胞t+1时刻状态仍为0。
若邻居中有一个元胞状态为1,则该元胞t+1时刻以P1的概率变为1,以其余的概率保持不变,其中Δ表示元胞状态中任意不等于1的值:
P(f(Δ,0,1)orf(1,0,Δ)=1)=p1
(1)
P(f(Δ,0,1)orf(1,0,Δ)=0)=1-p1
(2)
若邻居状态都为1,则该元胞t+1时刻以P2的概率变为1,以其余的概率保持不变:
P(f(1,0,1)=1)=p2
(3)
P(f(1,0,1)=0)=1-p2
(4)

该元胞t+1时刻状态变为0的概率为q0,其中*表示元胞状态中的任意值:
P(f(*,1,*)=0)=q0
(5)
该元胞t+1时刻状态变为-1的概率为q1:
P(f(*,1,*)=-1)=q1
(6)
该元胞t+1时刻状态变为2的概率为q2:
P(f(*,1,*)=2)=q2
(7)
由(5)(6)(7)式可知该元胞t+1时刻状态保持不变的概率为1-q0-q1-q2:
P(f(*,1,*)=1)=1-q0-q1-q2
(8)
3 仿真算例
根据所提出的突发事件灾害后果推演模型,分别对传染病发生后人的感染数量、城市火灾中建筑物受损数量进行推演。假设区域内具有100个承灾体,这些承灾体以一维的方式排列。采用定值型边界,边界值取为0,对模型中参数取不同值情况下灾害后果的演化情况进行仿真,每种情况仿真100次,总损失采用这100次数据的平均值。
3.1 城市火灾算例研究
城市中建筑物排列密集,由于危险源的存在以及人为的疏忽导致火灾后,可能引发非常严重的后果。如1923年9月1日中午时分,日本东京因8.2级地震所造成的火灾,共引发了上百处的起火点,再加上当天风势大,大火迅速蔓延最终导致了市区内三分之二以上的建筑物被烧毁。而对于大多数的城市火灾,起火点可能仅为一处。
因此,本文分别仿真一处起火点和多处起火点的城市火灾情况,多处起火点的数量定为该区域内建筑物总量的5%;设置了四种承灾体脆弱性不同的情况:易燃建筑物比例高,区域密度较大;易燃建筑物比例高,区域密度较小;易燃建筑物比例低,区域密度较大;易燃建筑物比例低,区域密度较小。模型中的一个元胞代表一小块区域。建筑物被引燃的概率和易燃建筑物比例、区域内建筑物的密度相关,估计P1,P2的值如表1所示。

表1 不同易燃建筑物比例、区域密度下P1,P2值
建筑物处于正常状态、燃烧状态和已烧毁状态分别对应元胞状态空间中的0、1、2状态。在不考虑人为干预的情况下,元胞由状态1只会变为状态2,故q0=0,q1=0。设定q2=0.1,即元胞在下一时刻由状态1变为状态2的概率为0.1。
从图5可以看出,经过一段时间以后,区域内烧毁的建筑物数量将达到稳态。由图5(a)和图5(b)的对比可知,着火点的数量越多,烧毁的建筑物数量也将越多。由同一幅图中曲线高度的不同可知,区域脆弱性越高,烧毁的建筑物数量也越多。因此,为了降低火灾所造成的建筑物损失,建筑物的材质应尽量避免木材等易燃材料,多采用防火型的材料;同时建筑物间的距离应遵守国家规定的标准规范,避免建筑物间隔太小。在火灾发生后,应尽快采取应急行动,这样可以有效减少房屋烧毁的数量。

图5 不同着火点时的建筑物损失数
文献[7]提出了基于元胞自动机的城市地震次生火灾蔓延模型,模拟了一处起火点情况下某小区的火灾蔓延过程,并分别截取30min、60min、90min、120min时小区内火灾蔓延状态图作为仿真结果。该模型适用于表现某一时间点上二维空间下区域内建筑物的状态,相对地,本文提出的模型能够表现灾害后果随时间连续变化的走势图,并能得到稳定的灾害后果。
3.2 传染病算例研究
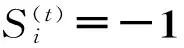
对传染病算例进行仿真时,人处于健康且不具有免疫状态、染病状态、死亡状态和健康且免疫状态分别对应元胞状态空间中的0、1、2、-1状态。设置如下:初始时刻有5%的人感染疾病,即初始时刻元胞空间中有5%的元胞状态为1;当一个人周围邻居都感染疾病而这个人健康且不具免疫力时,下一时刻其一定会感染疾病,即p2=1;病人康复后有免疫能力,由模型可知q0=0;病人死亡的概率为0.005,即q2=0.005。分别仿真有隔离和治疗措施及没有的情况,当没有隔离与治疗措施时,疾病传播能力较强,康复率较低,设定p1=0.8,q1=0.02;当有隔离和治疗措施时,疾病的传播能力下降,康复率上升,设定p1=0.4,q1=0.05。仿真结果如图6所示。
在图6(a)中,状态为0的元胞比例迅速下降,而状态为1的元胞比例先迅速上升,然后逐渐下降为零。经过一定的时间步后,区域内各种状态的元胞所占比例达到稳定,最终大多数元胞处于具有免疫力的-1状态,一部分元胞处于2状态,极少数元胞仍处于0状态。而在图6(b)中,达到稳定状态时,状态为0的元胞远多于图6(a),状态为2的元胞少于图6(a)。
由仿真结果可以看出:当缺乏隔离和治疗措施时,区域内受感染和死亡人数较多。采取适当的隔离和治疗措施后,传播过程中感染人数大量减少,死亡比例也显著降低。所以,当发生传染病时,应当尽可能地减少疾病的传播,可以通过减少人群接触,佩戴口罩等等方式来达到;同时,应加强医疗救助的水平,增加医院的接诊率等。
文献[9]使用二维元胞自动机模型研究传染病的传播问题,模拟了50×50的元胞空间下传染病的传播,分别对Moore邻居和Von Neumman邻居的情况进行了仿真。通过比较可以发现,用本文提出的一维元胞自动机模型的仿真结果(图6(a))与该文中的结果趋势相符。
图6 传染病算例仿真结果
通过3.1和3.2节的仿真可以发现,本文提出的模型适用于多种突发事件情景,并不局限于特定的突发事件。在图5和图6及大量仿真实验中,虽然模型的参数设置不同,但在一定的时间步后,模型都能收敛到一个稳定的结果。
4 结论
本文从承灾体的角度出发,利用元胞自动机模型研究了突发事件灾害后果推演的问题。首先介绍了应急领域对突发事件推演的研究现状,并界定了灾害后果的相关概念,然后提出了基于一维元胞自动机的灾害后果推演模型,制定了推演规则,通过对传染病疫情、城市火灾两个算例进行推演,验证了模型的有效性。该模型从承灾体的角度推演灾害后果,适用于多种突发事件情景,因此具有良好的可扩展性。推演结果反映了灾害后果随时间发展变化的趋势,可以为决策者提供应急行动的决策支持,推演的灾害后果最终将达到稳定状态,为突发事件损失的定量评估提供了一定的参考。
[1] 宗蓓华.战略预测中的情景分析法[J].预测,1994,02:50-51,55.
[2] 姜卉,黄钧.罕见重大突发事件应急实时决策中的情景演变[J].华中科技大学学报(社会科学版), 2009,23(1):104-108.
[3] 刘铁民.应急预案重大突发事件情景构建——基于“情景-任务-能力”应急预案编制技术研究之一[J].中国安全生产科学技术,2012,8(4):5-12.
[4] 王文俊,刘昕鹏,罗英伟,等.应急事件Ontology语义模型及其应用[J].计算机工程,2005,31(10):10-12, 44.
[5] 吴广谋,赵伟川,江亿平.城市重特大事故情景再现与态势推演决策模型研究[J].东南大学学报(哲学社会科学版),2011,13(1):18-25.
[6] 方志耕,杨保华,陆志鹏,等.基于Bayes推理的灾害演化GERT网络模型研究[J].中国管理科学, 2009,17(2):102-107.
[7] 柳春光,王碧君,潘建伟.基于元胞自动机的城市地震次生火灾蔓延模型[J].自然灾害学报,2010,19(1):152-157.
[8] 袁晓芳,田水承,王莉.基于PSR与贝叶斯网络的非常规突发事件情景分析[J].中国安全科学学报,2011,21(1):169-176.
[9] Hoya White S, Martín del Rey A, Rodríguez Sánchez G. Modeling epidemics using cellular automata[J]. Applied Mathematics and Computation, 2007, 186: 193-202.
[10] Stéphane Hallegatte. An adaptive regional input-output model and its application to the assessment of the economic cost of Katrina[J]. Risk Analysis, 2008, 28(3): 779-799.
[11] Kenneth Crowther G, Yacov Haimes Y. Application of the inoperability input-output model(IIM)for systemic risk assessment and management of interdependent infrastructures[J]. Systems Engineering, 2005, 8(4): 323-341.
[12] 史培军.再论灾害研究的理论与实践[J].自然灾害学报,1996,5(4):6-17.
[13] Stephen Wolfram. Statistical mechanics of cellular automata[J]. Reviews of Modern Physics, 1983, 55(3): 601- 644.
[14] Kristian Lindgren, Mats Nordahl G. Universal computation in simple one-dimensional cellular automata[J]. Complex Systems, 1990, 4: 299-318.
[15] Smith III A R. Simple computation-universal cellular spaces[J]. Journal of the ACM, 1971, 18(3): 339-353.
[16] Albert J, Culik II K. A simple universal cellular automaton and its one-way and totalistic version[J]. Complex Systems, 1987, 1: 1-16.
[17] Jean-Baptiste Yunès. Grids and universal computations on one-dimensional cellular automata[J]. Natural Computing, 201, 11(2): 303-309.
A Consequence Deduction Model of Emergency Based on One-Dimensional Cellular Automata
RONG Li-li, ZHOU Pei-heng, ZHANG Rong
(Institute of Systems Engineering of Dalian University of Technology, Dalian 116024, China)
The consequence of emergencies evolves over time. In order to have a general idea of the developing trend of the consequence, a consequence deduction model of emergency is proposed in this paper. Firstly, concerning the similarities of emergency consequences, a description of the principle of consequence evolution is given from the perspective of hazard bearing body. Then, this paper proposes a consequence deduction model of emergency based on one-dimensional cellular automata and all the properties of the model are built. Finally, the validity of the model is illustrated by two numerical examples. The model can be used for various emergencies and the result can support emergency decision-making.
emergency management; hazard bearing body; cellular automata; emergency consequence; emergency decision-making
2013- 08-30
国家自然科学基金资助项目(91024003,91024031,71371039)
荣莉莉(1964-),女,教授,博士生导师,研究方向:应急管理、计算智能、复杂网络;周培亨(1993-),男,硕士研究生,研究方向:应急管理;张荣(1989-),女,硕士研究生,研究方向:应急管理。
N945
A
1007-3221(2015)03- 0158- 07