新型带式输送机巡检机构系统设计
2015-07-07武倩平邱明权
张 行,李 伟,武倩平,邱明权,任 勇
(中国矿业大学 机电工程学院,徐州 221116)
0 引言
带式输送机在我国煤炭资源开采中举足轻重,矿井工作环境较为恶劣,瓦斯浓度、CO气体浓度等超标易造成井下安全事故,同时带式输送机自身驱动装置、改向装置和承载托辊等也会发生故障,都有可能影响到带式输送机的安全运行。因此,对矿井下带式输送机运输工况下的各项参数进行实时监测与预警,并做出应急动作对矿井安全生产意义深远。
受煤矿生产技术限制,我国为数较多的矿井在带式输送机的控制方式上,仍然沿用传统的人工手动、现场控制方式,在一定程度上耗费了人力和物力资源,极大地影响了煤炭开采效率,也给整个煤矿开采工作带来巨大的安全隐患。目前已有的自动巡检技术主要有无人机巡检[1]和机器人巡检两种方式,矿井开采环境复杂多变,现有巡检方式抗干扰能力差,且由于设备技术含量要求很高,维护相对困难,不易推广。本文设计的带式输送机巡检机构系统稳定可靠、装卸维护方便,规避了现有技术的不足。此外,通过上位机控制,巡检机构的巡检设备可沿工字钢轨道平稳运行;该设备还可用于供电装置、数据采集装置及无线传输装置的安装,实现对带式输送机各项参数的数据采集和无线传输,大大减少了监测环节,并有效解决了井下布线不便问题。随着计算机控制技术和远程监控技术的发展,基于状态监测及故障诊断技术[2],采用自动巡检系统来代替手动现场控制,对煤矿资源开采意义重大。
1 总体结构及工作原理
带式输送机巡检机构系统主要由机头部分、巡检设备和机尾部分等组成。图1为该系统的现场布置示意图。

图1 系统安装示意图
新型带式输送机巡检机构系统设计,运用了无极绳牵引单轨吊[3]的原理。整个系统由防爆三相异步电机驱动,以工字钢作为运行轨道,其中巡检设备与工字钢轨道采用轮轨接触方式,电机的运转通过PLC控制技术[4]实现,在钢丝绳摩擦力作用下,拖动巡检设备运行。
2 巡检机构系统设计
2.1 机头和机尾部分
机头部分由驱动电机、减速机、改向轮和安装支架等主要部件构成,作为巡检机构系统的动力传输部分,通过改向轮可实现钢丝绳变向。如图2所示,安装支架由顶部支撑板、支撑立柱和固定板组成,用于设备的安装。机尾部分由改向轮、支撑钢架和张紧装置构成,改向轮用于钢丝绳改向,受到钢丝绳长度的影响,张紧装置可使钢丝绳保持足够的张力,防止钢丝绳下坠并确保钢丝绳与驱动轮之间有足够的摩擦力。

图2 机头部和机尾部安装示意图
2.2 巡检设备与运行轨道

图3 巡检设备装配图
2.2.1 巡检设备
巡检设备作为整个巡检机构系统的核心部分,主要由行走机构、清扫装置、减速电机和巡检箱等部件构成,如图3所示。
行走机构主要包括行走轮、轴承和导向轮等部件,采用焊接和螺栓连接方式将各部件集成安装于组合板上;减速电机通过紧固螺栓固定,其输出轴与行走轮轴孔紧连接,行走轮运转同时可以带动减速电机旋转,有效地实现了机械能向电能转化,减速电机转化的电能可用于对巡检箱内供电装置充电,供电装置可对数据采集装置和无线传输装置供电;清扫装置由连接板、橡胶板、固定块三部分构成,矿井煤灰、粉尘的堆积会影响巡检装置的正常运行,清扫装置可实现对异物的清扫;配备有热像壳的巡检箱,可用于传感器、供电设备以及无线数据发射设备等的集成安装。
2.2.2 运行轨道和其它组件
运行轨道由工字钢焊接而成,以连接槽钢为中间部件,用螺栓将运行轨道和带式输送机支架连接为一体;巡检箱上表面置有焊接板,行走机构通过焊接方式与巡检箱连接;钢丝绳用钢丝绳夹固定,通过联结块与巡检设备联结;托轮组件由托轮和活节螺栓组成,是一种位置可调装置,可用于行走机构的固定,在导向轮协同作用下,可实现行走轮沿运行轨道对称布置,确保巡检设备运行的可靠性;在运行轨道的起始和终点位置安装限位开关,可用于巡检设备运行状态控制和位置控制等。
3 应用实施方案
3.1 主要技术参数
根据巡检系统现场安装情况,得到主要技术参数如表1所示。

表1 巡检装置主要技术参数
3.2 主要技术参数的确定与校核
3.2.1 参数设计计算
1)巡检设备运行速度v(m/s)

式中,K为蠕动系数,k=0.98.

图4 简化模型
2)钢丝绳张力计算
(1)防止钢丝绳打滑和脱绳,钢丝绳必须具有一定初张力,图4为机构系统简化模型。

式中,Smin为最小张力,N;C为挠度系数,C=800。
(2)当F1—F4侧为上升(动力运行状态)时,

(3)各点张力计算:

式中,w为运行阻力系数,w=0.02;µ1为行走轮和运行轨道之间摩擦因数,0.5;µ2为驱动轮与钢丝绳间摩擦因数,取0.25。

考虑到富裕系数L'=2m
3.2.2 参数校核
1)运行轨道强度校核
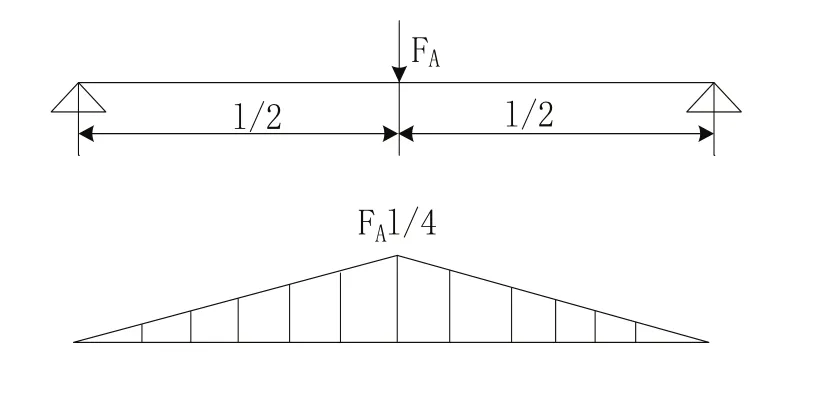
图5 轨道受力和弯矩
最大弯曲正应力:

式中,Mmax为工字钢截面最大弯矩;l为轨道的跨度;FA为巡检设备对工字钢总作用力;Wz为相对于中性轴的抗弯截面系数。
σmax=86.33MPa≤[σ]=215MPa,Wz=Wx=77.1cm3,弯曲正应力满足强度条件。
2)驱动轮防滑校验[5]:
钢丝绳牵引可靠性取决于是否有足够的摩擦力在极限动力运行状态,由欧拉方程:

式中,F1为重载侧张力;F2为轻载侧张力;e为自然底数;µ为衬垫与钢丝绳的摩擦系数,µ=0.2;β为驱动轮围包角,β=π。满足防滑安全要求。
3)钢丝绳校核:

其中,Sk为钢丝绳破断力总和;Sm为最大张力点张力,5.47KN;m为最低钢丝绳安全系数;mA为钢丝绳安全系数。

4)电动机校核:

式中,Kµ为防爆三相电机功率备用系数,Kµ=1.2;η为传递效率,η=0.79。
考虑到增加运量,矿用防爆立式安装电机YBK2-112M-6(B5)。
5)减速器校核:
(1)设备输出扭矩

选减速机为B3HV07-63,TN=20000>T=454.4N/m,满足条件。
(2)设备输出功率

η0为减速机传递效率,取为0.98;P1为减速机额定功率,大小为0.72kw。
3.3 巡检轨道有限元仿真
运行轨道受到载荷冲击会发生结构变形,造成结构不稳定。巡检设备位于轨道中部位置时为工字钢轨道最危险工作状态,本文基于ANSYS14.0选择四个行走轮共同加载的方式对工字钢轨道进行了集中载荷静力学有限元分析[6],得到应力应变云如图6所示。应力变形为1.38×10-5m,应力变化范围为1596Pa~4.84MPa,巡检轨道应力应变在合理范围内,满足要求。
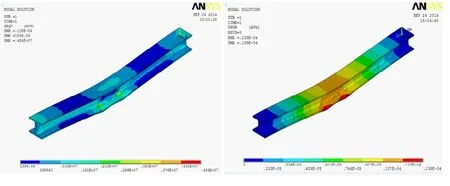
图6 应力应变云图
3.4 应用效果分析
3.4.1 设计效果
本文所设计的新型巡检机构系统,结构简单、灵活性强,通过PLC控制技术使整个系统平稳运行,具体实施流程如图7所示。

图7 巡检装置运行流程图
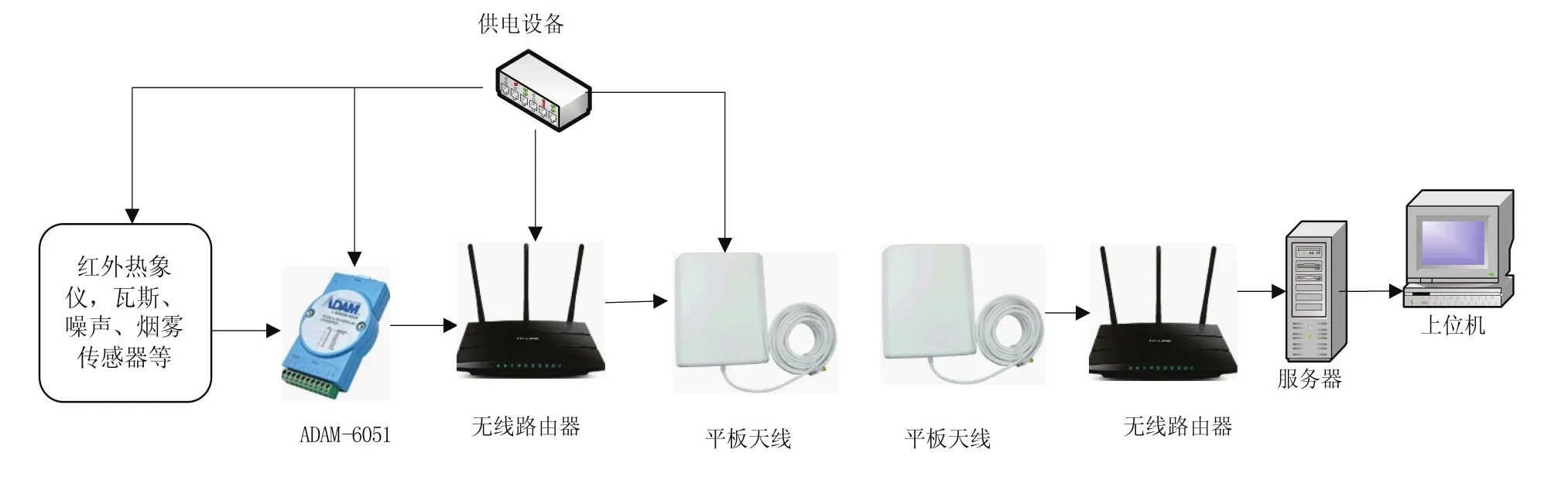
图8 信号无线传输原理图
此外,巡检箱内安装的瓦斯传感器、噪声传感器等,传感器具有自动预警功能,可用于噪声、瓦斯气体浓度等的监测;红外热像仪既可完成温度监测[7],又能对生产现场进行图像采集。传感器监测数据经研华数据采集卡进行数据采集,通过无线路由器进行数据中转,通过无线天线板实现点到点信号传输,基于无线发射技术,进一步数据传输至上位机做进一步分析处理,对突发状况可实现远程监控。信号传输原理如图8所示。
3.4.2 现场应用
本文设计的新型带式输送机巡检机构系统,在中煤平朔井工一矿得到了很好的运用。系统巡检设备在带式输送机巷道运行状态良好,减速电机和供电装置自动充放电方案可行,很好地实现了对多个传感器和无线传输装置供电。此外,实现了带式输送机运行工况下多传感器数据的集中采集和信号的无线传输,图9为系统现场安装图。

图9 现场安装图
4 结束语
与传统的智能巡检系统相比,新型矿用带式输送机巡检机构系统,具有装卸方便、便于维护和节能环保等突出优点。此系统可实现多传感器数据采集、自动充放电以及无线数据传输,为井下带式输送机远程监控和自动巡检提供了一种新的巡检方式,取代了人工作业,可对突发危险状况及时预警并采取有效的停机保护措施,应用前景广泛。
[1]朱为维,王启源.基于无人机的线路巡检技术研究[J].电子制作,2013,21:13-14+6.
[2]Andrew K.S.Jardine,Daming Lin,Dragan Banjevic.A review on machinery diagnostics and prognostics implementing condition-based maintenance[J].Mechanical Systems and Signal Processing,2005,207.
[3]张秋灵,王健,杜忠宇.无极绳单轨吊运人装置的研究与应用[J].科技资讯,2012,33:72+74.
[4]郭飒.PLC上位机监控系统的研究.设计及应用[D].东华大学,2004.
[5]洪晓华.矿井运输提升[M].徐州:中国矿业大学出版社,2005:261-267.
[6]黄志辉,赵红伟.钢轨应变分布场的有限元分析[J].机电工程,2007,04:13-14+22.
[7]QUAN Yanming,XU Hao,KE Zhiyong.Research on some influence factors in high temperature measurement of metal with thermal infrared imager[J].Physics Procedia,2011,19.
