海杂波测量定标的姿态修正数据处理方法
2015-07-05张玉石尹雅磊许心瑜李慧明张浙东吴振森
张玉石尹雅磊许心瑜李慧明张浙东吴振森
①(西安电子科技大学物理与光电工程学院 西安 710071)
②(中国电波传播研究所青岛分所 青岛 266107)
海杂波测量定标的姿态修正数据处理方法
张玉石*①尹雅磊②许心瑜②李慧明②张浙东②吴振森①
①(西安电子科技大学物理与光电工程学院 西安 710071)
②(中国电波传播研究所青岛分所 青岛 266107)
针对岸基海杂波测量雷达下视外定标海浪运动的影响问题,该文提出一种基于坐标变换的姿态修正方法,该方法结合雷达信号采集过程和雷达方向图因子,能够有效解决外定标过程中海面晃动对定标精度的影响。利用L波段岸基海杂波测量雷达获取的外定标试验数据,分析试验结果并对比姿态修正前后定标精度的改善效果,结果表明该方法可大大提高定标精度,可为改善岸基海杂波测量数据的普适性提供重要的技术支持。
雷达;海杂波;外定标;测量雷达;有源雷达定标器;坐标变换
1 引言
为了有效解决海杂波对雷达目标检测影响的抑制问题,海杂波特性研究多年来一直受到雷达领域广泛的关注[1-7]。利用雷达测量实际海面的回波,并进行实测数据分析是研究海杂波特性一种最直接和有效的方法[8-10]。若要一部雷达测量的海杂波数据具有普适性,将其研究成果可应用于其他雷达中,该雷达在杂波测量前必须进行定标(或校准)[11]。可以说雷达系统定标是地海杂波测量必不可少的一个重要环节,定标主要分为内定标和外定标。通过内定标可以消除雷达收发通道增益起伏、漂移等因素引起的信号相对变化,即对系统内部误差的校正;外定标是对杂波测量雷达整体的绝对标定,目的是获得杂波散射特性的绝对值,即通过对已知雷达散射截面积(Radar Cross Section, RCS)目标的测量来获得未知目标RCS的准确值,这是与其他测量结果进行对比的必要条件。
用于雷达定标已知RCS的目标称为定标体,根据采用的定标体类型,外定标又可分为无源定标和有源定标。无源定标采用无源目标,主要指金属圆球、角反射器和龙伯透镜反射器等[11];有源定标采用有源目标,通常指有源定标器(Active Radar Calibrator, ARC)[12]。雷达的承载平台不同,所采用的外定标方法也不同[13-18],如车载平台常采用上视无源定标,机载平台则需采用下视有源定标。
岸基雷达通常指架设于海岸或海岛上用于观测海面杂波或用于警戒的雷达。受到架设场地和观测区域的影响,制约了定标方案的实施。虽然利用空中定标体进行定标,可以大大减少背景杂波的影响,但是受到升空高度和空中管制等限制,实施困难较大,所以采用下视定标仍不失为一种简单的方法。但与机载地杂波测量雷达定标相比,定标体需布置于海面上,定标时海面背景的影响比地面更复杂。原因是,(1)定标体需要搭载的载体,为方便实施,可采用木质渔船或快艇,此时不仅只是海面作为定标背景,船只也作为定标背景的一部分,这就要求定标体的RCS要足够大,以提高信杂比;(2)海面背景的运动将引起定标体晃动与漂移等,从而导致进行定标时雷达采集到的定标信号起伏较大,定标数据结果不理想。
本文详细阐述了海杂波测量定标原理与基本方法,提出了岸基雷达下视外定标基于坐标变换的姿态修正方法,利用L波段海杂波测量雷达的外定标试验数据,分析了定标时船只姿态的影响及姿态修正后的结果,结果表明通过姿态修正方法进行定标数据处理,可以获得较高的定标精度,说明该方法的可行性和有效性,可为岸基雷达外定标提供重要的技术支撑,进而提高海杂波测量数据的普适性。
2 海杂波测量定标方法
2.1 定标原理
测量雷达的外定标需对已知RCS目标进行测量,获得雷达系统常数,进而可得到海杂波散射系数的绝对值。外定标一般在雷达测量的有效距离段区间布设已知RCS目标,目标可以是多个或对单个RCS目标进行多次重复测试,为增大RCS目标与背景之间的信杂比,通常采用ARC。ARC通常具有对雷达信号接收、放大及转发功能。当雷达发射功率、天线方向图等参数和ARC天线参数已知时,雷达接收ARC转发定标信号的功率为

式中,Pt为雷达发射功率,Gr0为雷达接收天线增益,Gt0为雷达发射天线增益,Gr(θ(t),φ(t))为雷达接收天线方向性因子,Gt(θ(t),φ(t))为雷达发射天线方向性因子,θ(t)为俯角,φ(t)为方位角,λ为波长,σc为定标器RCS值,Gp为雷达接收衰减,R(t)为雷达与ARC间的距离,L为系统双程损耗。
ARC的RCS值与波长、收发天线增益、电路系统增益成正比[12]。定标中当雷达波束主轴与ARC主波束对准时,雷达接收ARC的RCS值最大,即ARC设计的理想RCS。但实际定标试验时,常常存在波束不对准的情况。假设当雷达回波数据中ARC出现最大值时的俯仰方位角度为(θm,φm)。而ARC的理想RCS值σcm已知,则t时刻实际RCS为

式中,Gct(θc(t),φc(t ))为ARC发射天线方向性因子,Gcr(θc(t),φc(t ))为ARC接收天线方向性因子。由此,将实际RCS值代入式(1)即可求得雷达系统常数。
2.2 试验方法
岸基雷达在进行海杂波测量时,雷达波束下俯指向海面,接收海面后向散射回波信号。为获取较大角度范围下的杂波数据并降低周围地物环境对杂波测量的影响,岸基海杂波测量雷达通常架设于沿岸或距离海面较近的高地上。因此,对其进行外定标,在下视模式情况下往往需将定标体投放在海面上。为获得较高的定标信杂比,要求定标体具有较大的RCS值,较为常用的定标体为ARC。将ARC放置于海上定标时ARC随着海面状态变化会出现漂移、方位俯仰角度偏转等现象,需要进行有效的姿态修正。
定标试验时通常将ARC架设于反射截面较小的木质渔船或快艇上。岸基雷达由于不像机载雷达那样受飞行时间和架次的限制,对于定标试验来讲,其可操控性较强。因此,若实现在其波束照射范围内多个定标点的定标,可通过架设一套ARC后渔船航行至指定定标点的方式来实现。
试验过程中,首先需要进行时间同步,确保雷达采集回波数据和ARC记录数据时间保持在一个基准上,以便对照准确的采集时间进行定标信号的详细分析;接着需要对ARC的GPS位置和姿态的实时记录,用于定标数据处理过程的姿态修正;另外需要对试验过程中一些异常现象进行详细记录,为数据处理与分析提供最直接的依据,以便在数据中剔除异常信号。
3 定标数据处理方法
一次定标试验获取的数据主要包括以下几类:(1)雷达采集的回波数据,含海杂波数据、搭载船只回波数据、船只与ARC回波数据;(2)ARC采集数据;(3)全球定位系统(Global Positioning System, GPS)及姿态数据。定标数据处理首先需要根据GPS时间和位置信息,寻找定标信号最大值;接着进行信杂比估算和异常信号剔除,保留有效数据;最后在进行姿态修正基础上根据雷达方程计算系统常数。
3.1 坐标变换
试验过程中,波浪将引起船只横滚、倾斜和方位姿态的变化,使得ARC在雷达天线波束中的位置以及雷达在ARC天线波束中的位置随时间变化,将导致ARC的RCS发生变化。也就是说,在雷达系统常数计算过程中需考虑两者方向图因子实时变化的影响并进行修正。这些参数的计算需要在不同的坐标系下进行,这就涉及到坐标转换的过程[19-21],本试验涉及到的两个主要坐标转换为:ARC坐标转换和雷达坐标转换。
3.1.1 坐标系定义 本试验数据处理主要涉及到的坐标系定义为:(1)地理参考坐标系XnYnZn,以地理正北为基准(Xn轴)的地理坐标系,Zn向上,呈右手螺旋关系;(2)ARC理想坐标系XaYaZa,以雷达天线指向在地面投影指向的反方向为Xa,向上为Za; (3)ARC实际坐标系XbYbZb,以指向雷达天线的方向为Xb,向上为Zb; (4)ARC俯仰坐标系为XcYcZc, ARC俯仰角为α(上仰为正);(5)ARC横滚坐标系为XdYdZd,横滚角为β(当船只与雷达垂直时,顺时针为正);(6)雷达指向坐标系XsYsZs,以雷达天线指向的方向为Xs,向上为Zs; (7)雷达实际坐标系XrYrZr,以雷达实际指向ARC所在位置的方向为Xr,向上为Zr。
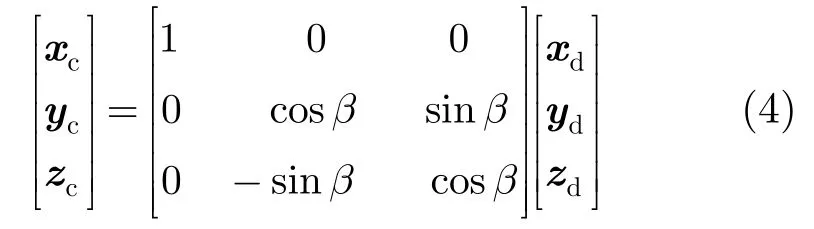
3.1.2 ARC坐标系转换 设回波数据中ARC出现最大值时,以雷达为视角时,ARC的位置为(θm,φm)。则坐标变换关系为:(1)理想坐标系到俯仰坐标系变换矩阵为(沿Y轴旋转,上仰取正,下俯取负,即迎Y轴看顺时针旋转)

(2)俯仰坐标系到横滚坐标系的变换矩阵为(沿X轴旋转,迎ARC逆时针为正)
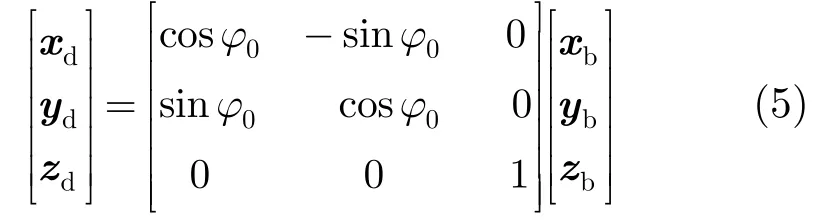
(3)横滚坐标系到ARC实际坐标系变换矩阵为(沿Z轴旋转,即迎Z轴看顺时针旋转为正)
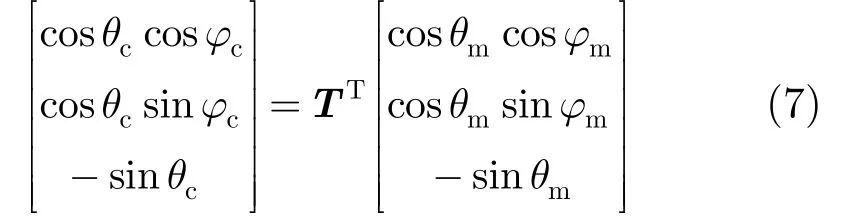
则,总变换过程为

即,T=TαTβTφ0。根据式(7)即可求出ARC实际指向雷达的俯仰角和方位角(θc,φc)
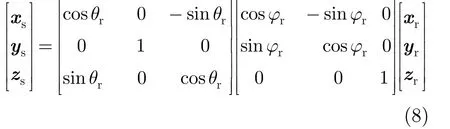
3.1.3 雷达坐标系转换 ARC出现最大值时,ARC为视角时雷达位置为(θsm,φsm),有关系φsm=φm-π,从雷达指向坐标系到实际坐标系变换矩阵为(先沿Y轴旋转,上仰取负,下俯取正;再沿Z轴旋转,即迎Z轴看顺时针旋转为正):XsYsZs即
3.2 姿态修正
设雷达每次采集用时为Δt1,记海浪变化周期为Δts,姿态记录间隔为Δt0。为提高定标精度,姿态记录采样频率和海浪周期间需至少满足Δts/Δt0>100,以确保姿态记录采样样本点数。在实际的定标试验中,根据ARC搭载船只类型的不同,导致其横滚角和倾斜角变化不同。设横滚角、倾斜角、方位角的变化周期分别为Δta,Δtb,ctΔ,那么在进行姿态修正时,则令Δts=min{Δta,Δtb,Δtc},即依据姿态变化最快原则确定需修正的最短间隔。在此基础上,进一步根据雷达采集时长,确定姿态修正的优选时间段为
当前雷达采集数据的对应时刻为t时,外定标目标有效姿态数据段为[t-Δt,t]时间内的姿态数据。确定有效姿态数据段后,在坐标变换基础上,即可获得某一个具体时刻雷达方向图因子和ARC的方向图因子,进而完成对姿态变化影响的修正。上述的过程需对雷达每一次的采集回波数据进行,并在一段时间内进行统计平均处理,最终获得一次定标的系统常数。
4 试验结果分析
4.1 试验过程描述
为验证基于坐标变换的姿态修正方法用于岸基雷达外定标的有效性,利用中国电波传播研究所架设于海拔100 m高沿岸平台上的L波段海杂波观测雷达[22]开展了外定标试验。试验雷达和参试ARC的主要技术参数如表1所示。
ARC的搭载船只选用木质渔船,在雷达观测的擦地角范围内,设定了3个定标点,分别为1, 2, 3号点,对应擦地角分别为3.0°, 4.4°, 1.5°。在试验前,采用GPS设备对所有参试设备进行对时,确保时间基准。采用姿态记录仪实时记录定标器天线的姿态变化,记录姿态数据包括横滚角、倾斜角、方位角,其采集步长为10 ms。试验过程中,当船只航行至指定定标点后,将船只抛锚,雷达随后采集一段时长数据,即船只和海面背景回波数据;接着打开ARC的转发功能,ARC开始工作,雷达采集一段时长数据,即ARC定标信号数据;一个定标点数据获取后,航行至下一个定标点,如此反复,获取多组定标数据样本。试验需选择海情较低以及能见度较好的天气进行,一方面便于海上外场试验的实施,另一方面降低海浪运动引起船只晃动的幅度,降低数据的离散度以提高外定标的精度。以下给出的试验结果均是在2级海况下开展试验获得的。
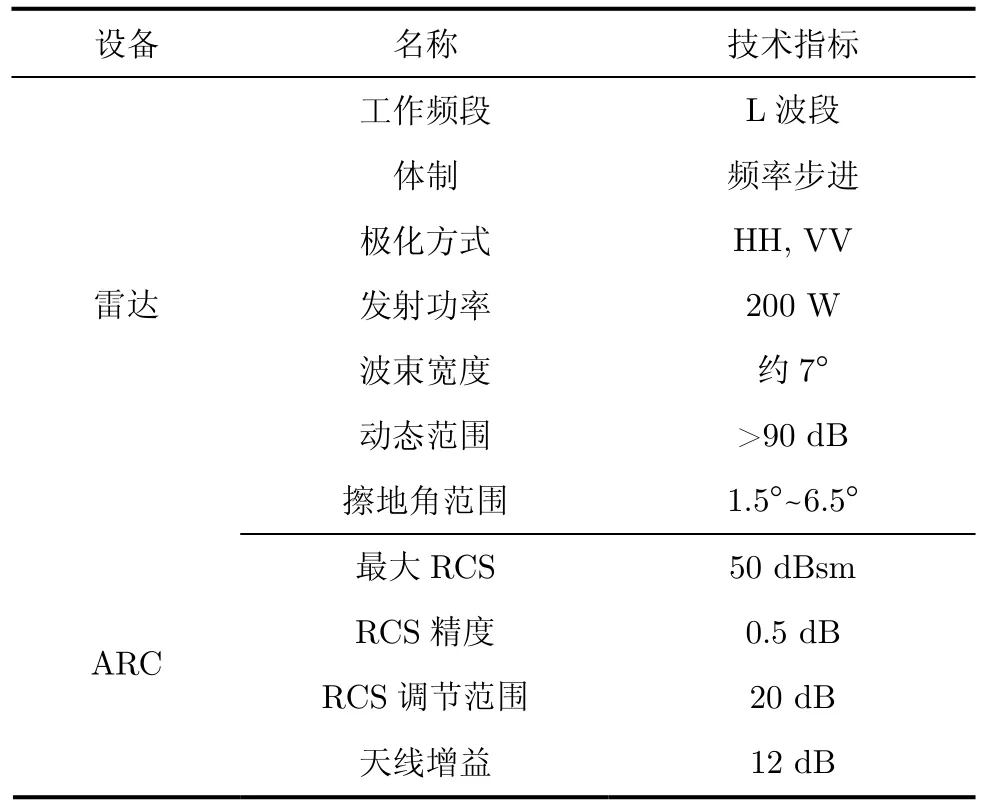
表1 外定标试验雷达与ARC主要技术参数
4.2 试验结果
图1给出了某次定标数据的雷达回波灰度图,可以看出ARC在开和关状态下信号的差别非常明显。ARC在关断状态下,雷达采集海面和船只回波信号,即定标时的背景回波;ARC开启状态下,ARC作为标准RCS点目标信号,接收雷达信号并转发给雷达。对比两种状态可知,定标时的信杂比在30 dB以上,定标数据有效,可进行定标数据处理。
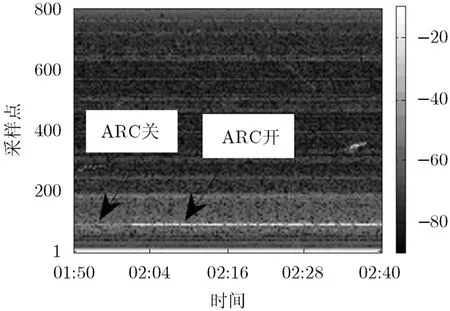
图1 ARC开与关两种状态下雷达回波灰度图
由姿态记录设备实时采集的某次定标姿态角度信息如图2所示。从结果可以看出,横滚角度的起伏变化较小,倾斜角度变化较大,最大达到了10°。角度范围变化最大的是方位角度,有些情况下偏离理想指向约15°,但方位角度变化速率较慢,而横滚和倾斜角度变化速率较快,小的抖动较多。这些姿态角度的变化将引起雷达定标信号的剧烈起伏,定标数据处理中必须予以修正。
图3给出了采用姿态修正和不采用姿态修正两种情况下多次定标得到的雷达系统常数,姿态修正前后与分别获得的系统常数相对偏差结果如图4所示,其中相对偏差用(L为实际定标值,为其平均值)衡量。可以看出在姿态修正前,多次定标试验结果间的离散度较大,其中系统常数的标准偏差达到了4.8 dB;采用基于坐标变换的姿态修正方法后,结果得到了明显改善,其系统常数的标准偏差降低至0.9 dB,获得了较高的定标精度。
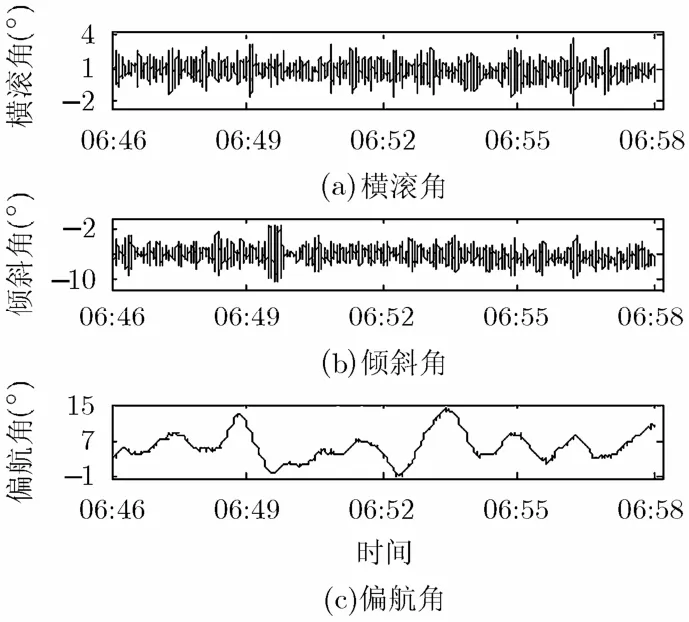
图2 同步采集定标器天线的姿态角度变化

图3 定标姿态修正前后两种状态雷达系统常数对比
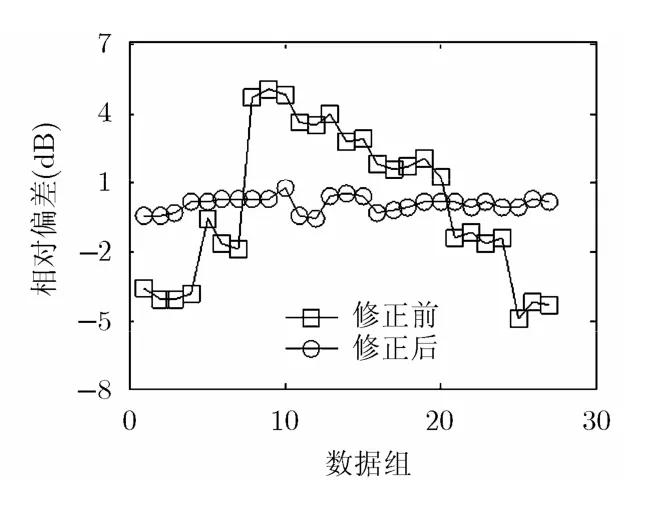
图4 两种情况下系统常数的相对偏差对比
4 结束语
将定标体放置于晃动的海面上,是岸基海杂波测量雷达的最容易实施的一种下视外定标方法,但同时也带来了海面晃动对定标精度影响的问题。通过基于坐标变换的姿态修正数据处理方法,将搭载船只姿态变化对外定标结果的影响进行修正。通过对L波段雷达外定标试验数据结果的对比分析,可以看出该修正处理方法能够较好地补偿船只晃动对定标结果的影响,获得了较高的定标精度,说明了该方法的可行性和有效性。
[1] Posner F L. Spiky sea clutter at high range resolutions and very low grazing angles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2002, 38(1): 58-73.
[2] Melief H W, Greidanus H, Genderen P V, et al.. Analysis of sea spikes in radar sea clutter data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2006, 44(4): 985-993.
[3] Watts S. Modeling and simulation of coherent sea clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(4): 3303-3317.
[4] Karimian A, Yardim C, Gerstoft P, et al.. Multiple grazing angle sea clutter modeling[J]. IEEE Transactions on Antennas and Propagation, 2012, 60(9): 4408-4417.
[5] Dong Y. Optimal coherent radar detection in a K-distributed clutter environment[J]. IET Radar, Sonar & Navigation, 2012, 6(5): 283-292.
[6] Ward K, Tough R, and Watts S. Sea Clutter: Scattering, the K Distribution and Radar Performance[M]. 2nd Edition, London: The Institution of Engineering and Technology, 2013: 17-52.
[7] 张玉石, 许心瑜, 尹雅磊, 等. L波段小擦地角海杂波幅度统计特性研究[J]. 电子与信息学报, 2014, 36(5): 1044-1048.
Zhang Yu-shi, Xu Xin-yu, Yin Ya-lei, et al.. Research on amplitude statistics of L-band low grazing angle sea clutter[J]. Journal of Electronics & Information Technology, 2014, 36(5): 1044-1048.
[8] Walker D. Doppler modelling of radar sea clutter[J]. IEE Proceedings-F Radar Sonar and Navigation, 2001, 148(2): 73-80.
[9] Greco M, Gini F, and Rangaswamy M. Statistical analysis of measured polarimetric clutter data at different range resolutions[J]. IEE Proceedings-F Radar Sonar and Navigation, 2006, 153(6): 473-481.
[10] Dong Y and Merrett D. Analysis of L-band multi-channel sea clutter[J]. IET Radar, Sonar & Navigation, 2010, 4(2): 223-238.
[11] Ulaby F T, Moore R K, and Fung A K. Microwave Remote Sensing Vol. II: Radar Remote Sensing and Surface Scattering and Emission Theory[M]. Massachusetts: Addison-Wesley, 1982: 190-205.
[12] Brunfeldt D R and Ulaby F T. Active reflector for radar calibration[J]. IEEE Transactions on Geoscience and Remote Sensing, 1984, GE-22(2): 165-168.
[13] Freeman A, Alves M, Chapman B, et al.. SIR-C data quality and calibration results[J]. IEEE Transactions on Geoscience and Remote Sensing, 1995, 33(4): 848-857.
[14] Li L H, Heymsfield G M, Tian L, et al.. Measurements of ocean surface backscattering using an airborne 94-GHz cloud radar-implication for calibration of airborne and spaceborne W-Band radars[J]. Journal of Atmospheric and Oceanic Technology, 2005, 22(17): 1033-1045.
[15] Freeman A. SAR calibration: an overview[J]. IEEE Transactions on Geoscience and Remote Sensing, 1992, 30(6): 1107-1121.
[16] Herselman P L, Baker C J, and de Wind H J. An analysis of X-band sea clutter and small boat reflectivity at medium-to-low grazing angles[J]. International Journal of Navigation and Observation, 2008, 2008: Article ID 347518.
[17] 朱金台, 董晓龙, 林文明, 等. Ku波段旋转扫描扇形波束散射计地面扩展目标在轨定标[J]. 电子与信息学报, 2013, 35(8): 1793-1799.
Zhu Jin-tai, Dong Xiao-long, Lin Wen-ming, et al.. Calibration of the Ku-band rotating fan-beam scatterometer using land extended-area targets[J]. Journal of Electronics & Information Technology, 2013, 35(8): 1793-1799.
[18] 何杰颖, 张升伟. K波段微波辐射计通道优化和定标研究[J].电波科学学报, 2012, 27(5): 1012-1018.
He Jie-ying and Zhang Sheng-wei. Channel selection and calibration of K band microwave radiometer[J]. Chinese Journal of Radio Science, 2012, 27(5): 1012-1018.
[19] 康士峰, 罗贤云, 葛德彪, 等. 任意姿态机载PD雷达三维地杂波算法研究[J]. 电子学报, 2000, 28(3): 21-24.
Kang Shi-feng, Luo Xian-yun, Ge De-biao, et al.. Study on algorithm of 3D terrian clutter for airborne PD radar with arbitrary postures[J]. Acta Electronica Sinica, 2000, 28(3): 21-24.
[20] 李亮, 洪峻, 明峰, 等. 一种基于有源定标器的电离层对星载SAR定标影响校正方法[J]. 电子与信息学报, 2012, 34(5): 1096-1101.
Li Liang, Hong Jun, Ming Feng, et al.. An approach for ionospheric effects correction on spaceborne SAR calibration based on active radar calibrator[J]. Journal of Electronics & Information Technology, 2012, 34(5): 1096-1101.
[21] 李飞, 纠博, 刘宏伟. 基于随机霍夫变换的干涉ISAR横向定标算法[J]. 电子与信息学报, 2013, 35(1): 49-55.
Li Fei, Jiu Bo, and Liu Hong-wei. A novel method of cross-range scaling interferometric ISAR based on randomized Hough transform[J]. Journal of Electronics & Information Technology, 2013, 35(1): 49-55.
[22] Zhang Yu-shi, Wu Zhen-sen, Zhang Zhe-dong, et al.. Applicability of sea clutter models in nonequilibrium sea conditions[C]. Proceedings of the IET International Radar Conference, Guilin, China, 2009: 12.
张玉石: 男,1978 年生,高级工程师,博士生,研究方向为地海杂波测试系统与方法、地海杂波特性与建模等.
尹雅磊: 女,1982 年生,工程师,硕士,研究方向为雷达信号处理、杂波数据模拟及分析.
许心瑜: 女,1982 年生,工程师,硕士,研究方向为海杂波数据处理及特性研究.
李慧明: 男,1981 年生,工程师,研究方向为地海杂波测试与软件及地海杂波数据库与应用技术.
张浙东: 男,1976 年生,高级工程师,研究方向为地海杂波数据库与应用技术.
吴振森: 男,1946年生,教授,博士生导师,研究方向为随机介质、非均匀介质中电磁(光)波的传播与散射、目标激光散射特性和电磁散射等.
Data Processing Method of Posture Correction for Calibration of Sea Clutter Measurement
Zhang Yu-shi①Yin Ya-lei②Xu Xin-yu②Li Hui-ming②Zhang Zhe-dong②Wu Zhen-sen①
①(School of Physics Optoelectronic Engineering, Xidian University, Xi’an 710071, China)
②(China Research Institute of Radiowave Propagation, Qingdao 266107, China)
The external calibration of shore-based sea clutter measurement radar faces the problems with influence of sea wave motion. This paper proposes a posture correction method based on a coordinate transformation. The proposed method which combines the radar signal acquisition process and radar antenna direction factor, can effectively solve the effect of sloshing on the accuracy of the external calibration. Using the external calibration trial data collected by L-band shore-based sea clutter measurement radar, the experimental results are analyzed and compared with posture correction improvement on the calibration accuracy. The results show that the proposed method can greatly improve the accuracy of the calibration and is important to provide technical support for universal adaptability of the real sea clutter data.
Radar; Sea clutter; External calibration; Measurement radar; Active radar calibrator; Coordinate transformation
TN957.51
A
1009-5896(2015)03-0607-06
10.11999/JEIT140659
2014-05-19 收到,2014-07-18改回
*通信作者:张玉石 zhang10695@126.com
