船舶系泊动力分析数值模拟计算研究
2015-06-29高峰沈文君李焱谭忠华
高峰,沈文君,李焱,谭忠华
(交通运输部天津水运工程科学研究所港口水工建筑技术国家工程实验室工程泥沙交通行业重点实验室,天津300456)
船舶系泊动力分析数值模拟计算研究
高峰,沈文君,李焱,谭忠华
(交通运输部天津水运工程科学研究所港口水工建筑技术国家工程实验室工程泥沙交通行业重点实验室,天津300456)
利用动力分析方法的数学模型SHIP⁃MOORINGS对船舶系泊过程中的运动、波浪载荷及橡胶护舷的碰撞力进行了数值模拟计算。试验中,系泊船舶运动量、系缆力和撞击力随着波高的增大而增大,随着波浪周期的增大一般也增大,其变化关系还与船舶本身的自摇周期有关。当45°斜浪和90°横浪作用时,横移<1.0 m(PIANC,1995)的要求最容易超标,为该浪向作用下船舶作业标准的主要控制指标;当0°顺浪作用时,升沉<1.0 m的要求最容易超标,为顺浪作用下船舶作业标准的主要控制指标。在45°斜向浪作用时,沿船长方向布置的护舷所受碰撞力分布不均衡,艏、艉处的碰撞力较大,而在90°横浪和0°顺浪作用时,作业和系泊条件略好,因此控制浪向为艏来45°斜浪作用。其中,10 000DWT的船型由于吨位相对较小,风浪流作用下,运动量较大,其中横摇、横移表现最为明显。对于各泊位所选择的护舷型号,计算表明,系缆力控制工况下,护舷所受到的最大撞击力均小于其设计反力,护舷型号选择合理。
船舶系泊;波浪;运动量;护舷;数值模拟
对于大型船舶的系泊问题研究,国内较常用的方法是在波浪水池中采用船模试验进行测试,得到所需船舶运动量、系缆力等参数,为码头设计方案确定系泊及作业条件。相比物理模型研究,国内的数值研究从20世纪90年代才开始。随着计算机技术和理论方法的进步,船舶系泊数值研究水平以及计算方法都得到了较好的发展。数值模拟需要时间短,经济效益好,可以随时增加分析功能,并且通用性好[1]。系泊系统的数值模拟分析方法分为静力分析和动力分析。前者以船舶受到的一切外载荷均按照静力考虑,如风荷载、水流力均按照OCIMF(石油公司国际航运论坛)的推荐公式和系数进行计算,而波浪力只计入定常漂移力。而后者利用频域下的波浪激振力、附加质量和辐射阻尼,得到时域下的波浪作用力、附加质量和迟滞函数,最终求得船舶运动响应和系泊系统内部应力。对基于动力分析系泊模型主要考虑的外界作用包括:波浪、流、风、潮汐等。波浪包含规则波和不规则波、流包含潮流和非潮流、风场包含稳定场和不规则场、潮汐包含潮流和潮汐[2]。因此,该类型的系泊分析计算就比较复杂,具有一定难度。SHIP⁃MOORINGS是荷兰Alkyon Hydraulic Consultancy&Research开发的典型动力模型分析计算平台,该计算平台由计算模块SHIP⁃MOOR⁃INGS和后处理模块POSTMOORINGS组成一个完整系统,是一款可以模拟风、浪、流条件下系泊船舶和其他系泊或锚泊物体的动力行为的计算平台。其系泊船舶的运动是在时域内求解,系统在水平面内无约束,其计算采用的瞬态响应函数是基于Cummins[3]提出的方法在时域内求解船舶的运动方程,而系泊船舶的水动力荷载在频域内求解,然后采用Oortmerssen[4]提出的方法将频域内的水动力荷载转换到时域内[5]。浅水区的低频二阶波浪激振力通过Pinkster理论进行模拟。SHIP⁃MOORINGS可计算多种外界作用,包括波浪激振力、水动力、水静力、风荷载、水流力、缆绳力等。波浪激振力可以计算不同形式的波,包括一阶不规则波,二阶长波,微幅波漂移力等。该计算平台采用三维势流理论,对护舷刚度进行建模时,可以考虑橡胶护舷的非线性刚度,且按照护舷三维的实际作用点进行计算,而不是象通常的做法那样把防护舷当作一维作用力处理,受力计算会随船舶位置变化而变化。
1 计算模式简介
1.1 基本理论
(1)船舶运动量方程。
在SHIP⁃MOORINGS中船舶运动量通过在时间域求解六自由度运动方程计算得到

对船舶惯性以及所有外部力量,模型假设船x-z面是一个平面的对称。同时,还假设这船舶是一个常数和固定的质量分布刚体。
(2)外部荷载。
船舶运动引起的水动力反应荷载主要基于Cummins制定时域中的势能理论[6]

式中:Fi表示第i项水动力荷载项;m表示无限频率的附加质量系数;uj为第j个速度分量;Kij即为第i和第j项速度延迟函数。无限频率的附加质量和延迟函数主要通过频率依赖的附加质量和水动力阻尼系数求解计算,使用势能理论三维衍射模型[7]。
风荷载基于相对于船舶自身速度与航向的风速及风向的函数计算,包括考虑了船舶自身运动的影响。对于船舶纵移、横移、横摇和回转运动量的风力系数可作为相对于气流角α的函数,表示为

式中:Fi表示第i项风荷载项;Ci表示第i项风力系数;α表示(水平面上)相对气流夹角;ρa为特定的空气质量;Vw为表示(水平面上)相对风速;Ai表示第i项参考区面积(对于纵移即正面投影平面区域,对于其他项即横向平面投影面积);Si表示风矩长度(对于纵移和横移S=1,对于横摇S=HM,即工程区域的平均高度;对于回转S=Lpp)。对于升沉运动,风荷载Fi为0,而对于纵摇即等于FX·HM。
在SHIP⁃MOORINGS中,粘性横摇阻尼作为横摇速度的线性函数来模拟

式中:Kvis表示粘性横摇阻尼矩;dp表示粘性横摇阻尼系数;p表示横摇速度。波浪漂移力作类似于风和水流力的处理:

式中:Fi表示第i项平均漂移力;Ci表示特定波谱的平均波浪漂移力系数;α表示相入射波角度;Hm0表示有效波高。
1.2 基本数据输入
数据输入通过交互式界面或者ASCⅡ码文件进行输入,布置图辅助有关泊位与船型信息等输入,并可提供模拟结果的动态显示,其主要输入构成如图1所示,其中包括:
(1)船型数据:基本数据由数据库直接调入,船型特征主要由船-护舷相互作用的3D描述、流体静力学特性和质量惯性、静态流动系数(冲击角函数)、动态流动系数(有旋或粘性流)、风力系数(冲击角函数)、船舶动力特性附加质量、波浪力传递函数、迟滞函数等。

图1SHIP⁃MOORINGS输入系统构成示意图Fig.1Input system of SHIP⁃MOORINGS
(2)波浪数据:可输入几个主波系(main wave system),这是为了考虑集中波共同作用。对于主波系,可采用JONSWAP谱定义,由有效波高、最大周期和增强因子等,定义与主波系有关的各种二阶波系,诸如反射与绕射问题;包含长波效应、平均波浪漂移力。此外,还允许采用用户自定义波系等。
(3)其他环境参数:这些参数的数值或方向在空间与时间上是变化的,诸如风、流和水位。
(4)系泊参数:缆绳布置、缆绳特征、护舷布置、护舷特性等。
1.3 系泊模型坐标系
SHIP⁃MOORINGS采用两个坐标系统,一个是地球固定坐标系一个是船体坐标系(图1)。两个坐标系统的OXY平面都平行于码头平面。地球固定坐标系统是为了指定环境工况以及船舶的初始位置和方向。X1轴指向右,Z1轴的原点位于水平面。船体坐标系用于与船舶相关的输入和输出,例如导缆孔及护舷的位置。船体坐标系的原点位于船舶的中心,Z1轴位于初始静水面。该系统的x轴也平行于码头泊位平面,但根据船的方向,X2轴的正方向可指向右也可指向左。当鸟瞰图中船艏指向右时,船体坐标系的X2轴也指向右,且相应的Y2轴指向上。当鸟瞰图中船艏指向左时,船体坐标系的X2轴也指向左,且相应的Y2轴指向下。外界环境载荷对船体的作用方向,按照绕地球固定坐标系X轴的逆时针方向指定,如图2所示。

图2坐标系示意图与环境载荷角度意图Fig.2Coordinate system and environment load direction
2 系泊试验模拟条件
2.1 试验船型主尺度
船型主尺度见表1。船舶装载状态包括满载、半载和压载三种状态。
2.2 风浪流
(1)风况。风速18 m/s;风向为东南向。对于#A1和#A2泊位为艉来顺风,对于#B1和#B2泊位为吹开横风。
(2)波浪。试验波浪条件主要参考前期数学模型试验结果,主要波浪要素如表2所示。在数值模拟计算中,采用JONSWAP对波浪进行模拟,谱峰因子取值为3.3。
(3)潮流。工程前实测潮流流速不大,最大流速在0.17~0.31 m/s。潮流数学模型计算表明,工程实施后,码头回旋区形成回流,流速不大,综合考虑,计算时码头前沿水流为0°(艉来顺流),#A1、#A2泊位前的流速为0.15 m/s,#B1、#B2泊位前的流速为0.10 m/s。

表1设计船型统计表Tab.1Statistics of design ship type
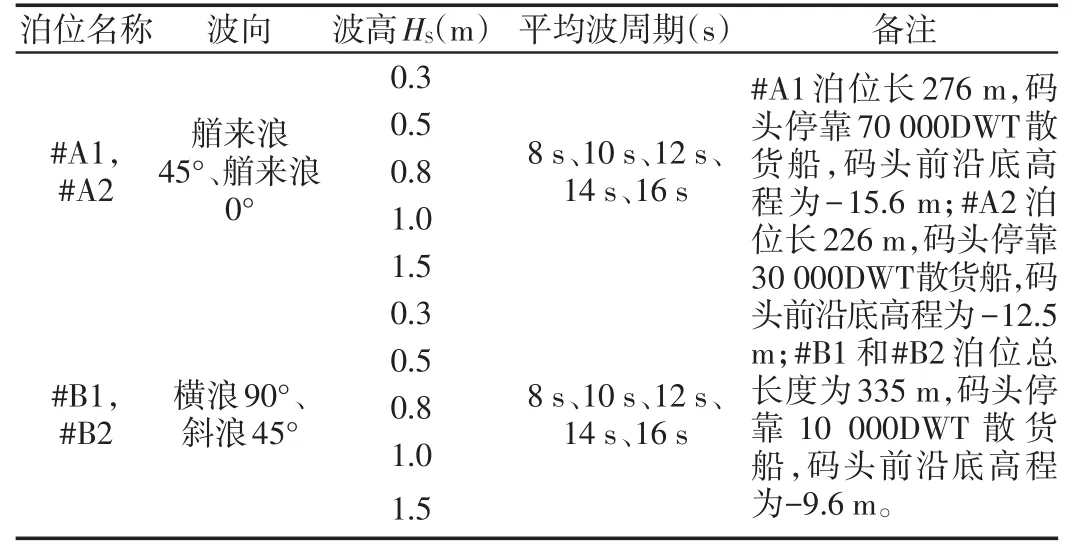
表2波浪要素表Tab.2Design wave conditions
2.3 缆绳与系泊设施
根据设计船型情况,结合相关工程经验,确定缆绳采用尼龙缆。其中70 000DWT散货船尼龙缆直径72 mm,缆绳破断力为740 kN,系缆方式为3:3:2(图3-a),单根缆绳初始力12 t;30 000DWT散货船尼龙缆直径64 mm,缆绳破断力为580 kN,系缆方式为3:3:2(图3-b),单根缆绳初始力10 t;10 000DWT散货船尼龙缆直径52 mm,缆绳破断力为390 kN,系缆方式为3:3:2(图3-c),单根缆绳初始力10 t。对于70 000DWT船舶,系缆设施为1 000 kN系船柱,30 000DWT船舶的系缆设施为650 kN系船柱,10 000DWT船舶的系缆设施为400 kN系船柱。
模拟计算时对每根缆绳建模分析。计算条件下,70 000DWT、30 000DWT和10 000DWT的散货船的缆绳总数均为16根,每根缆绳的受力变形曲线根据通用的WILSON公式[8]计算获得(图4)。
2.4 护舷
#A1码头采用单鼓SUC1600H低反力型护舷型式,计算时参考码头布置图以及系缆示意图,设置了15个护舷结构,部分间距为16 m,部分间距为21 m。#A2码头采用单鼓SUC1450H低反力型护舷型式,计算时参考码头布置图以及系缆示意图,设置了12个护舷结构,部分间距为16 m,部分间距为20.5 m。#B1和#B2码头采用单鼓SCK1150H低反力护舷型式,计算时参考码头布置图以及系缆示意图,设置了9个护舷结构,部分间距为16 m,部分间距为18.5 m。各护舷性能如表3所示,受力变形曲线如图4所示。
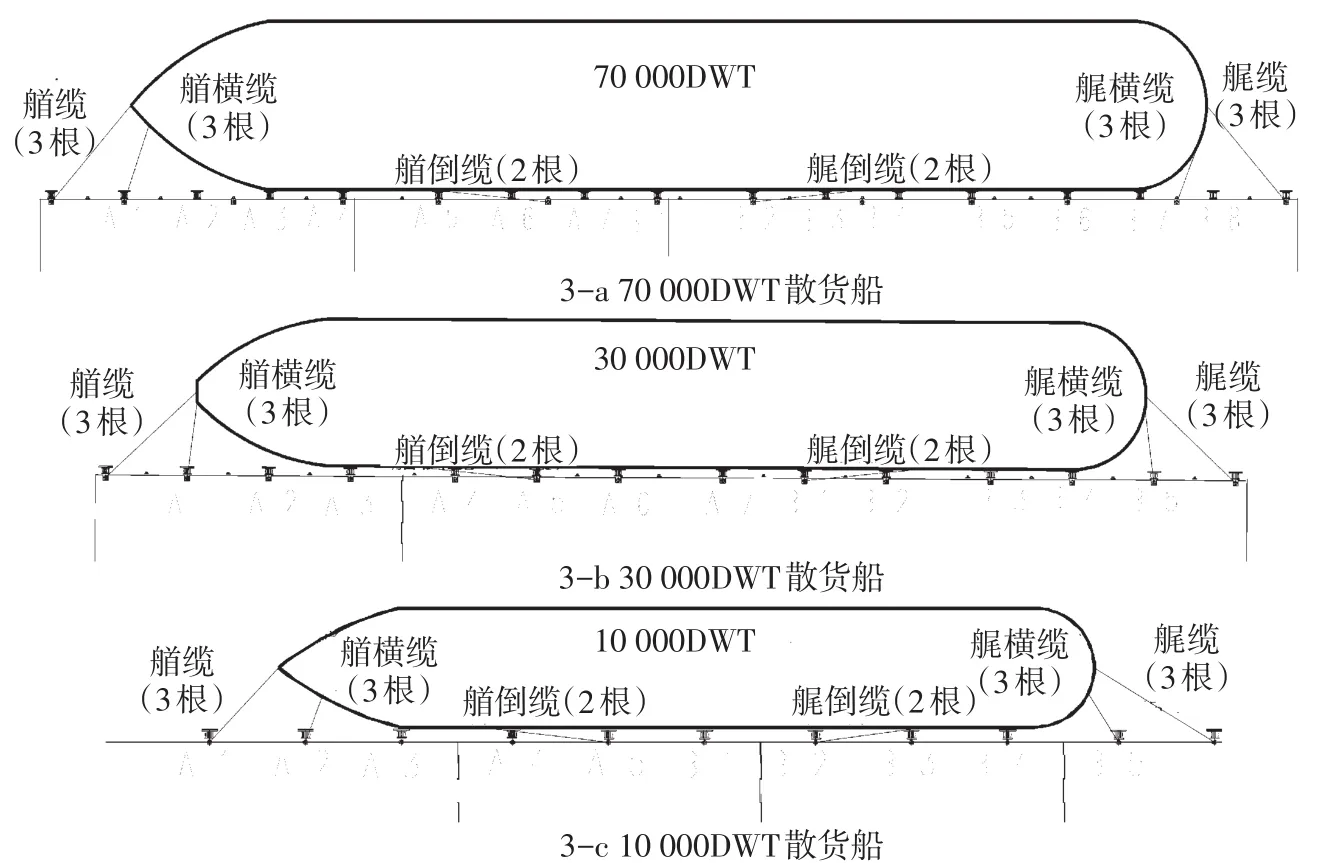
图3系缆及护舷布置示意图Fig.3Arrangement of mooring lines and fenders

表3护舷性能表Tab.3Fender performance
3 系泊参考标准
3.1 船舶运动量标准
系泊船舶运动量是衡量船舶作业条件的重要技术指标之一,包括船舶的纵移、横移、升沉、纵摇、横摇、回旋共计6个自由度。根据技术要求,本次试验运动量标准采用国际航运会议常设协会(PIANC)于1995年推荐的抓斗式散货船允许运动量[9](表4)。
3.2 船舶系缆力标准
根据石油公司国际海事论坛(OCIMF)《Mooring Equipment Guidelines(2008)》的规定,“对于钢缆(steel wire),其缆绳所受拉力不应大于其最小破断力(MBL)的55%。对于合成纤维缆(synthetic rope),其缆绳所受拉力不应大于其最小破断力的50%;对于尼龙缆(polyamide rope),其缆绳所受拉力不应大于其最小破断力的45%”[10]。因此,本次试验系缆力标准如下:70 000DWT船舶单根缆绳的最大受力应小于Φ72 mm的尼龙缆的最小破断力的45%,为333 kN(33.9 t);30 000DWT船舶单根缆绳的最大受力应小于Φ 64 mm的尼龙缆的最小破断力的45%,为261 kN(26.6 t);10 000DWT船舶单根缆绳的最大受力应小于Φ52 mm的尼龙缆的最小破断力的45%,为175.5 kN(17.9 t)。

表4散货船允许运动量(PIANC,1995)Tab.4Allows movement of bulk carrier

图4缆绳与护舷受力变形曲线Fig.4Fender stiffness curve
4 计算结果与分析
试验分别对三种船型在风浪流共同作用下的泊位作业条件和系泊条件进行了分析,三种船型的模型建立以及各泊位的位置分布如图5所示。
数模试验中,作业条件主要以船舶作业时允许的6个自由度运动量为依据进行判断,试验中当45°斜浪和90°横浪作用时,横移<1.0 m的要求最易超标,故为该条件下的主要控制指标;当0°顺浪作用时,升沉<1.0 m的要求最易超标,故为该条件下的主要控制指标。对应的系泊条件,则主要以缆绳所受系缆力不应大于其最小破断力的45%为依据进行判断。
4.1 70000 DWT船型计算结果
试验进行了包含艏来45°斜浪和艏来0°顺浪两个浪向与风、流组合的计算,其中艏来45°斜浪条件下,进行了设计高水位和设计低水位两个水位条件下的计算。结果表明,水位的变化对系泊船舶的运动量、系缆力和撞击力的影响不大,故艏来0°顺浪时只进行了设计低水位的计算,相应其他船型也对水位组合进行了简化。试验结果表明可知,70 000 DWT船在艏来45°斜浪作用下,横缆力一般大于其他缆力。对比满足作业条件限制波高工况与满足系泊条件的限制波高工况可知,系泊条件的允许波周期可大于作业条件的允许波周期。在艏来0°顺浪与风、流共同作用下,6个运动量中以船舶升沉为控制因素。顺浪作用下,船舶系缆力不大,各试验条件下系缆力均未超过Φ72 mm的尼龙缆的最小破断力的45%,故70 000DWT船的系泊条件由45°斜浪控制。斜浪与顺浪作用下,船舶护舷所受的撞击力均小于护舷的设计反力,表明护舷设计型号满足要求。该船型的主要试验计算结果见表5所示。

图5三种试验船型的模型布置图Fig.5 Layout of three kinds of ship model
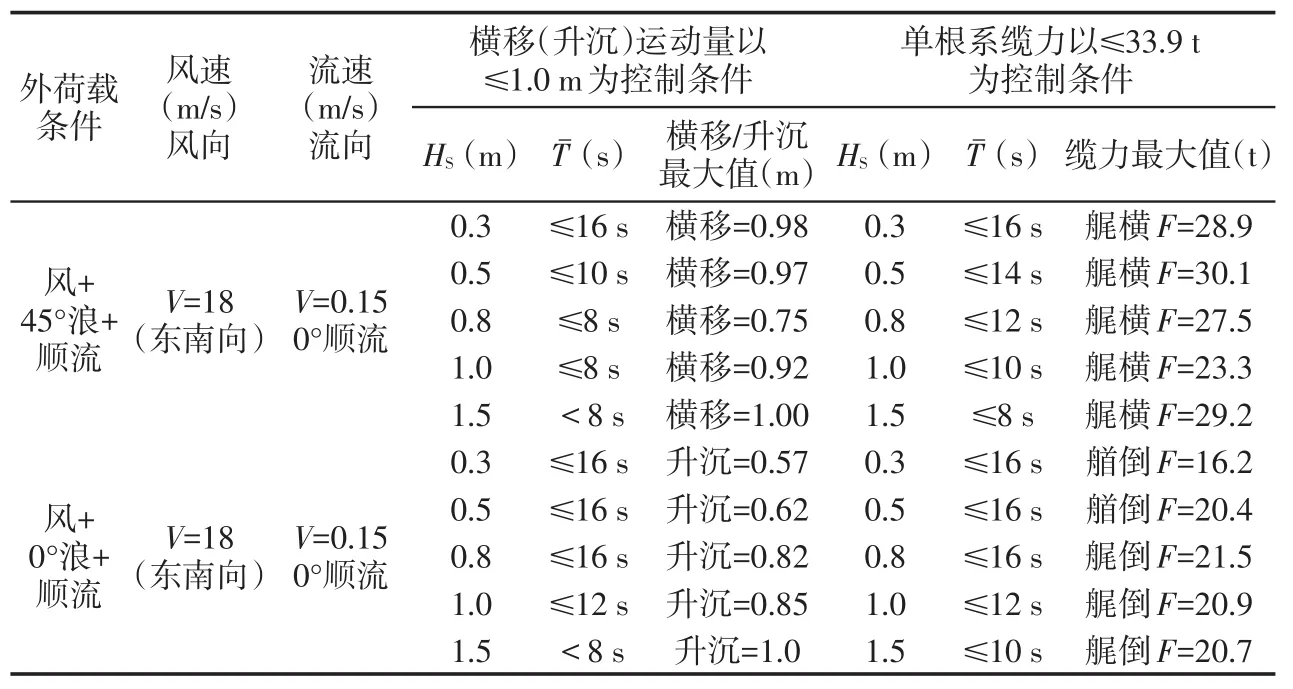
表570 000 DWT船分别以运动量和系缆力为控制条件的作业和系泊条件Tab.5With movement and mooring force control condition of assignments and mooring conditions for 70,000 DWT ship
4.2 30000 DWT船型计算结果
艏来45°斜浪与风、流共同作用下,当有效波高达到1.0 m时,横移已略有超标,达到1.5 m时,横移超标较大,因此建议作业允许的有效波高不应大于1.0 m。试验表明,30 000DWT船在艏来45°斜浪作用,横缆力一般大于其他缆力,对比满足作业条件限制波高工况与满足系泊条件的限制波高工况可知,系泊条件的允许波周期要大于作业条件的允许波周期。艏来0°顺浪与风、流共同作用下,6个运动量中船舶升沉为控制因素。顺浪作用下,船舶系缆力不大,各试验条件下系缆力均未超过Φ64 mm的尼龙缆的最小破断力的45%,故30 000DWT船的系泊条件由45°斜浪控制。斜浪与顺浪作用下,船舶护舷所受的撞击力均小于护舷的设计反力,表明护舷设计型号满足要求。该船型的主要试验计算结果见表6所示。
4.310 000DWT船计算结果
在90°横浪作用下,当有效波高达到1.0 m时,横移超标较大,因此建议作业允许的有效波高应小于1.0 m。10 000DWT船在90°横浪作用,横缆力一般大于其他缆力,对比满足作业条件限制波高工况与满足系泊条件的限制波高工况可知,波高在0.3~0.8 m时,系泊条件的允许波周期可大于作业条件的允许波周期。45°斜浪与风、流共同作用下,当有效波高达到1.0 m时,横移超标较大,因此建议作业允许的有效波高应小于1.0 m。对比满足作业条件限制波高工况与满足系泊条件的限制波高工况可知,波高在0.3~0.8 m时,系泊条件的允许波周期要大于作业条件的允许波周期。斜浪与顺浪作用下,船舶护舷所受的撞击力均小于护舷的设计反力,表明护舷设计型号满足要求。该船型的主要试验计算结果见表7所示。

表630000DWT船分别以运动量和系缆力为控制条件的作业和系泊条件Tab.6With movement and mooring force control condition of assignments and mooring conditions for 30,000 DWT ship

表710 000 DWT船分别以运动量和系缆力为控制条件的作业条件和系泊条件Tab.7With movement and mooring force control condition of assignments and mooring conditions for 10,000 DWT ship
5 结语
采用基于动力分析方法的船舶系泊数值模拟计算平台,通过对不同设计船型在风浪流共同作用下的系泊试验分析,给出了70 000DWT、30 000DWT和10 000DWT散货船以是否满足运动量和系缆力要求的作业和系泊控制条件,并得出如下结论:
(1)以船舶运动量作为标准,45°斜浪、90°横浪作用时横移(Sway)是船舶作业控制指标,而当0°顺浪作用时升沉(Heave)为船舶作业的控制指标。系泊船舶的运动量、系缆力和撞击力随着波高、波周期的增加有增大趋势,其变化幅度与不同船型本身的固有周期有关。系泊船舶在45°斜向波浪作用时,护舷所受碰撞力分布不均衡,以艏艉处的碰撞力较大,在90°横浪作用时,护舷所受碰撞力分布较为均衡。
(2)各试验船舶均在0°顺浪作用时的作业和系泊条件明显好于45°浪,故其系泊控制条件为艏来45°斜浪作用时,10 000DWT船型由于吨位相对较小,受风浪流影响较大,以横摇、横移表现最为明显。在系缆力控制工况下,护舷所受到的最大撞击力均小于其设计反力,护舷型号选择合理。
(3)船舶系泊数值计算分析在我国使用不够普遍,大部分还是以物理模型试验为主。与目前国内各主要设计单位采用的静力分析方法为主的系泊计算相比,由于波浪等因素的动力作用不应被忽略或简化,因此静力模型具有一定局限性,因此还是应该选用以动力模型为基础的软件进行分析计算,并随着今后相关数、物模以及原型试验的比较积累更多的经验。
参考文献:
[1]孙明坤.系泊系统分析计算软件概述[EB/OL].北京:中国科技论文在线[2006-06-07].http://www.paper.edu.cn/releasepaper/ content/200606-107.
[2]邱大洪,薛鸿超.工程水文学:第三版[M].北京:人民交通出版社,1999.
[3]Cummins W E.The impulsive response function and ship motions[J].Symposium on ship theory,Institute fur Schiffbaudren Univer⁃sität Hamburg,Hamburg,Germany,1962(1):25-27.
[4]Van Oortmerssen G.The motions of a moored ship in waves[D].The Nederlands:Delft University of Technology,1976.
[5]Alkyon.SHIP⁃MOORINGS Introduction[M].The Nederlands:Alkyon Hydraulic Consultancy&Research,2001.
[6]Cummins W E.The impulse response function and ship motions[R].Washington D.C.:D.T.M.B,1962.
[7]Van Oortmerssen G.The motions of a moored ship in waves[M].Wageningen:H.Veenman en Zonen,1976.
[8]JTJ/T 234-2001,波浪模型试验规程[S].
[9]PIANC.CRITERIA FOR MOVEMENTS OF MOORED SHIPS IN HARBOURS A PRACTICAL GUIDE[R].Brussel:PIANC,1995.
[10]MOORING EQUIPMENT GUIDELINES(3RD EDITION)[S].OCIMF,2008.
Study on numerical simulation of ship mooring by dynamic analysis
GAO Feng,SHEN Wen⁃jun,LI Yan,TAN Zhong⁃hua
(Tianjin Research Institute for Water Transport Engineering,National Engineering Laboratory for Port Hydraulic Construction Technology,Key Laboratory of Engineering Sediment,Ministry of Transport,Tianjin 300456,China)
Based on numerical simulation model of SHIP⁃MOORINGS,the movement,wave load and impact force of the rubber fender in the process of ship mooring were calculated.During the test,the momentum,mooring force and impact force increase with the increasing of wave height and wave period,and the change has relationship with ship′s natural period.When the wave direction is 45°and 90°,the requirement of sway below 1.0 m(PIANC, 1995)is most likely to be out of limits,and it is the main control index of ship operation condition.When the wave direction is 0°,the requirement of heaving below 1.0 m is most likely to be out of limits,and it is the main control in⁃dex of ship operation condition.In oblique wave of 45°,the fenders along the ship are under uneven force,and the impact forces on ship bow and stern are bigger.In transverse wave of 90°and following sea of 0°,the operation and mooring condition is slightly good,so control wave direction is oblique wave of 45°.Among them,the ship move⁃ment under the action of wind and waves is obvious because 10,000 DWT ship type is relatively small.For each fender type,the calculation results show that the biggest impact force is all less than its design reaction under the control condition of mooring force,and the fender selection is reasonable.
ship mooring;wave;movement;fender;numerical simulation
U 661.3;O 242.1
A
1005-8443(2015)06-0494-08
长江南京深水航道一期工程交付使用
2015-06-12;
2015-10-29
中央级公益性科研院所基本科研业务费专项资金项目(TKS130203)
高峰(1978-),男,山东省蓬莱市人,高级工程师,主要从事港口航道及海岸工程研究。Biography:GAO Feng(1978-),male,senior engineer.
本刊从长江航务管理局获悉,2015年12月3日,长江南京以下12.5 m深水航道一期工程交接会在江苏南通召开,标志着长江干线太仓至南通段12.5 m深水航道进入正式交付使用。根据此前一年5个月的试运行情况,一期工程进入正式运行阶段后,长江干线太仓至南通段12.5 m深水航道可满足5万t级集装箱船舶(实载吃水≤11.5 m)全潮,5万t级散货船、油船乘潮双向通航以及10万t级及上海轮减载乘潮通航的要求。自此,长江下游12.5 m深水航道里程也将达到79 km。(殷缶,梅深)
